You might also like
- Signal and Systems Student Lab Observation Manual For B.E/B.TechDocument100 pagesSignal and Systems Student Lab Observation Manual For B.E/B.TechSrikanth ImmaReddyNo ratings yet
- AWP Unit 5 NotesDocument45 pagesAWP Unit 5 NotesSrikanth ImmaReddyNo ratings yet
- Student Verilog HDL LAB MANUAL FOR BE/B.TECH ECE STUDENTSDocument84 pagesStudent Verilog HDL LAB MANUAL FOR BE/B.TECH ECE STUDENTSSrikanth ImmaReddy100% (1)
- Micro Controller 8051Document162 pagesMicro Controller 8051Srikanth ImmaReddyNo ratings yet
- Types of AntennasDocument95 pagesTypes of AntennasSrikanth ImmaReddyNo ratings yet
- MICRO CONTROLLER LAB ManualDocument33 pagesMICRO CONTROLLER LAB ManualSrikanth ImmaReddyNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5782)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Storage Tanks Basic TrainingDocument97 pagesStorage Tanks Basic Traininganouar82100% (8)
- Government Procurement Reform Act under RA 9184Document50 pagesGovernment Procurement Reform Act under RA 9184Maricel Anober100% (1)
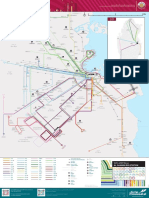
- Greater Doha Bus Services: Al Ghanim Bus StationDocument1 pageGreater Doha Bus Services: Al Ghanim Bus Stationramadan rashadNo ratings yet
- Sample Excel SheetDocument5 pagesSample Excel SheetsanjiNo ratings yet
- Manual Spg2500firman93dbDocument27 pagesManual Spg2500firman93dbAlexandra StanNo ratings yet
- OJT ManualDocument21 pagesOJT ManualRALLISON100% (2)
- Coffee Harvesting to Brewing: A Complete GuideDocument4 pagesCoffee Harvesting to Brewing: A Complete GuideNgọc MinhNo ratings yet
- Professional Practice ManagementDocument3 pagesProfessional Practice ManagementMohit GuptaNo ratings yet
- Furuno SC-50 - 110Document30 pagesFuruno SC-50 - 110etchegarayf100% (1)
- Inorganic Chemistry Principles of Structure and Re Activity John Huheey 4th EditionDocument1,049 pagesInorganic Chemistry Principles of Structure and Re Activity John Huheey 4th Editionluminary_iitbhu89% (65)
- Series: Instruction ManualDocument10 pagesSeries: Instruction Manualjbernal89No ratings yet
- Ijfetr 2022 0039Document11 pagesIjfetr 2022 0039Abdoo DadaNo ratings yet
- Vizio User ManualDocument76 pagesVizio User ManualcastleNo ratings yet
- Penilaian Risiko Pada Onshore Pipeline Menggunakan Metode RiskDocument6 pagesPenilaian Risiko Pada Onshore Pipeline Menggunakan Metode RiskAksanul's CreatorNo ratings yet
- Sampling and Data CollectionDocument11 pagesSampling and Data CollectionFil Luayon40% (5)
- Chapter 4Document4 pagesChapter 4KrisTine May LoloyNo ratings yet
- 013ADocument2 pages013ACkaal74No ratings yet
- Echosounder Series HD370 380 390 ManualDocument54 pagesEchosounder Series HD370 380 390 Manuallo5tboy5No ratings yet
- Service Marketing Assignment PDFDocument4 pagesService Marketing Assignment PDFpiumi hansaniNo ratings yet
- Bio DataDocument2 pagesBio Datasudheer vishwakarmaNo ratings yet
- Maxon RE65 Graphite Brushes 250wattDocument1 pageMaxon RE65 Graphite Brushes 250wattElectromateNo ratings yet
- Magic's Danganronpa Kirigiri Volume 7 English TranslationDocument321 pagesMagic's Danganronpa Kirigiri Volume 7 English TranslationZakDJNo ratings yet
- Micropropagation and Microbes DocumentDocument20 pagesMicropropagation and Microbes DocumentRavneet KaurNo ratings yet
- Ocean's Impact on Weather Lab ResultsDocument3 pagesOcean's Impact on Weather Lab ResultsAbdullah Shahid0% (1)
- ISO 17799 Security Audit Example PWC PDFDocument26 pagesISO 17799 Security Audit Example PWC PDFAndré Luis BusnelloNo ratings yet
- C-Pro Giga: Programmable ControllersDocument46 pagesC-Pro Giga: Programmable ControllersHeli wilsonNo ratings yet
- 21 Card CounterDocument56 pages21 Card CounterRosa Meltrozo100% (2)
- Name That City: The Cost of LivingDocument3 pagesName That City: The Cost of LivingMartyneJohnNo ratings yet
- Ancient Greece - Unit PlanDocument7 pagesAncient Greece - Unit PlanCosti TsakNo ratings yet
- Test#1: Sub Inspector Bs14: EmailDocument34 pagesTest#1: Sub Inspector Bs14: EmailEngr T . TNo ratings yet