You might also like
- Vectores y Magnitudes PDFDocument12 pagesVectores y Magnitudes PDFGuillen Morales M.No ratings yet
- Problemas resueltos de electromagnetismo. Volumen I: ElectrostáticaFrom EverandProblemas resueltos de electromagnetismo. Volumen I: ElectrostáticaNo ratings yet
- Vectores en El Espacio.Document40 pagesVectores en El Espacio.Jhonattan NeiraNo ratings yet
- Ec Trilce FisicaDocument251 pagesEc Trilce FisicaDaniel CortezNo ratings yet
- Unidad 2 El MovimientoDocument48 pagesUnidad 2 El MovimientoJuan UrbinaNo ratings yet
- FM01 - Introducción A La FísicaDocument12 pagesFM01 - Introducción A La FísicargopceNo ratings yet
- Fisica 3 PDFDocument250 pagesFisica 3 PDFÏvän RödrîgöNo ratings yet
- ANALISIS VECTORIALDocument8 pagesANALISIS VECTORIALAladino Morales lopezNo ratings yet
- Sintitul 1Document19 pagesSintitul 1Erick Corilla ContrerasNo ratings yet
- Física geometría vectorialDocument19 pagesFísica geometría vectorialbgjhon100% (1)
- Quimica - FisicaDocument558 pagesQuimica - FisicaDiego Bendezu100% (1)
- Pendulo Simple PDFDocument13 pagesPendulo Simple PDFMafe CortesNo ratings yet
- Colegio BilingÜe Lancaster - CaliDocument17 pagesColegio BilingÜe Lancaster - CalimyfcblNo ratings yet
- PDFDocument251 pagesPDFHendry BeltranNo ratings yet
- RP-CTA5-K03 - Ficha 3 - Una Idea Completa de Las Magnitudes Escalares y VectorialesDocument12 pagesRP-CTA5-K03 - Ficha 3 - Una Idea Completa de Las Magnitudes Escalares y VectorialesJuanCarbajal100% (1)
- Capitulo Nº1Document23 pagesCapitulo Nº1Luis Enrique Acuña TangoaNo ratings yet
- Guia VectoresDocument13 pagesGuia VectoresrepasomateNo ratings yet
- Geometría del espacio euclidiano: cantidades vectoriales y escalaresDocument15 pagesGeometría del espacio euclidiano: cantidades vectoriales y escalaresReik Luiz DiazNo ratings yet
- MomentumDocument12 pagesMomentumDanaeNo ratings yet
- Vectores y espacio tridimensionalDocument8 pagesVectores y espacio tridimensionalJuan Francisco Gutierrez HernandezNo ratings yet
- Analisis VectorialDocument45 pagesAnalisis VectorialJose LuisNo ratings yet
- Aplicacion de TrigonometriaDocument15 pagesAplicacion de TrigonometriaRaquel MartinezNo ratings yet
- FC01 20 04 15 PDFDocument8 pagesFC01 20 04 15 PDFJavier Ignacio VilloutaNo ratings yet
- Vectores y escalares: propiedades y representaciónDocument23 pagesVectores y escalares: propiedades y representaciónjorge eliecerNo ratings yet
- Calculo VectorialDocument20 pagesCalculo VectorialUiichitho ZhamudhioNo ratings yet
- Introducción a la física y sus ramas principalesDocument251 pagesIntroducción a la física y sus ramas principalesMaría José Villanueva Olvea83% (6)
- Axiomas de Hilbert PDFDocument9 pagesAxiomas de Hilbert PDFCamilo Gutiérrez100% (1)
- FM01 PDV 12Document12 pagesFM01 PDV 12JavierssmNo ratings yet
- Temario Cálculo VectorialDocument39 pagesTemario Cálculo Vectorialabraham condeNo ratings yet
- Apéndice A: Introducción Al Cálculo VectorialDocument16 pagesApéndice A: Introducción Al Cálculo VectorialJavier HerreraNo ratings yet
- Geometria 1bachDocument35 pagesGeometria 1bachSusi DovalNo ratings yet
- 3 Física Diferenciado 2017 VectoresDocument13 pages3 Física Diferenciado 2017 VectoresChristian Alejandro ReinosoNo ratings yet
- Apuntes1 ElectromagnetismoDocument28 pagesApuntes1 ElectromagnetismoRodrigo Amaru Bruna VásquezNo ratings yet
- Vectores en El Plano XyDocument76 pagesVectores en El Plano XyKevin PimentelNo ratings yet
- Física_Clase6_03.26Document8 pagesFísica_Clase6_03.26Alejandra AyalaNo ratings yet
- Posicion Relativa de Dos RectasDocument6 pagesPosicion Relativa de Dos RectasRicardo VallejoNo ratings yet
- BC 1-Unidad 5-Geometria Analitica PlanaDocument18 pagesBC 1-Unidad 5-Geometria Analitica PlanaEon ZenitramNo ratings yet
- Edinson CicloV Fisica 3 PDFDocument2 pagesEdinson CicloV Fisica 3 PDFJose Luis ReinaNo ratings yet
- VECTORESDocument23 pagesVECTORESkamyla quispeNo ratings yet
- Cap1 Vectores en El PlanoDocument23 pagesCap1 Vectores en El Planoramirex7No ratings yet
- Cap1 La Geometria Del Espacio EuclidianoDocument15 pagesCap1 La Geometria Del Espacio Euclidianoerwin_carryNo ratings yet
- Geometría analítica y vectoresDocument41 pagesGeometría analítica y vectoresRodrigo CMNo ratings yet
- Física, A-B Medidas, VectoresDocument25 pagesFísica, A-B Medidas, VectoresDennys ChaconNo ratings yet
- Semana 5 - Vectores en R2 y R3Document37 pagesSemana 5 - Vectores en R2 y R3Bryam Aguilar VargasNo ratings yet
- Teorema de TalesDocument4 pagesTeorema de Talessnost80100% (2)
- TAREA 1 FISICA CCCDocument11 pagesTAREA 1 FISICA CCCJuan Eduardo Avilez PorcelNo ratings yet
- Optimizacion No LinealDocument8 pagesOptimizacion No Linealjoseflores888No ratings yet
- 1 - Vectores PDFDocument28 pages1 - Vectores PDFDiego correa peñaNo ratings yet
- Importancia de los vectores en física e ingenieríaDocument12 pagesImportancia de los vectores en física e ingenieríaCamila MartínezNo ratings yet
- VECTORES_MTDocument4 pagesVECTORES_MTGiovanniNadamasNo ratings yet
- VectoresDocument23 pagesVectoresPatty Vasquez100% (1)
- Análisis vectorial completoDocument63 pagesAnálisis vectorial completofuck uNo ratings yet
- Introducción A La Física Newtoniana. Manuscrito de Cátedra. Hugo ArellanoDocument125 pagesIntroducción A La Física Newtoniana. Manuscrito de Cátedra. Hugo ArellanoarturocalmasterNo ratings yet
- Asignacion G1-G2Document1 pageAsignacion G1-G2Asbleidis FernándezNo ratings yet
- Programa y BibliografiaDocument2 pagesPrograma y BibliografiaJESUS ADRIAN BENITEZ SOLANONo ratings yet
- PDFDocument25 pagesPDFJairo Cuervo GámezNo ratings yet
- Informacion ImportanteDocument4 pagesInformacion ImportanteJairo Cuervo GámezNo ratings yet
- Guia Termodinamica Quimica 2Document186 pagesGuia Termodinamica Quimica 2Jairo Cuervo Gámez100% (1)
- Introduccion Laboratorio de Transferencia de Calor IDocument6 pagesIntroduccion Laboratorio de Transferencia de Calor IJairo Cuervo GámezNo ratings yet
- Conduccion de Calor Con Manantial Calorifico de Origen QuimicoDocument9 pagesConduccion de Calor Con Manantial Calorifico de Origen QuimicoJairo Cuervo GámezNo ratings yet
- Notas Sistemas Concentrados Segundo VideoDocument1 pageNotas Sistemas Concentrados Segundo VideoJairo Cuervo GámezNo ratings yet
- Foro de Introducción Al LaboratorioDocument3 pagesForo de Introducción Al LaboratorioJairo Cuervo GámezNo ratings yet
- Punto 4Document2 pagesPunto 4Jairo Cuervo GámezNo ratings yet
- Heat Transfer Equipment SelectionDocument19 pagesHeat Transfer Equipment SelectionJairo Cuervo GámezNo ratings yet
- Introduccion A La Segunda Ley de La TermDocument22 pagesIntroduccion A La Segunda Ley de La TermJairo Cuervo GámezNo ratings yet
- Capitulo 2, Clase Conduccion - Ecuacion Unidimensional Parte 1Document18 pagesCapitulo 2, Clase Conduccion - Ecuacion Unidimensional Parte 1Jairo Cuervo GámezNo ratings yet
- Practica 4 Intercambiadores de PlacasDocument15 pagesPractica 4 Intercambiadores de PlacasJairo Cuervo GámezNo ratings yet
- Articulo para La Practica 2Document9 pagesArticulo para La Practica 2Jairo Cuervo GámezNo ratings yet
- 1 de SeptiembreDocument5 pages1 de SeptiembreJairo Cuervo GámezNo ratings yet
- 3 QCA ANALITICA I Ing 231010 Extendido 2Document11 pages3 QCA ANALITICA I Ing 231010 Extendido 2Jairo Cuervo GámezNo ratings yet
- Pep - Ing - Quimica - 2016 MayoDocument41 pagesPep - Ing - Quimica - 2016 MayoJairo Cuervo GámezNo ratings yet
- Bienvenidos 3Document1 pageBienvenidos 3Jairo Cuervo GámezNo ratings yet
- Programa y BibliografiaDocument2 pagesPrograma y BibliografiaJESUS ADRIAN BENITEZ SOLANONo ratings yet
- Contenidos Programaticos de Matematicas Aplicadas 2020-1 2Document4 pagesContenidos Programaticos de Matematicas Aplicadas 2020-1 2Jairo Cuervo GámezNo ratings yet
- Cuadro Comparativo Teorias Ácido-BaseDocument2 pagesCuadro Comparativo Teorias Ácido-BaseJairo Cuervo Gámez100% (2)
- Conocimientos Basicos en Riesgo Quimico Estefania ClavijoDocument4 pagesConocimientos Basicos en Riesgo Quimico Estefania ClavijoJairo Cuervo GámezNo ratings yet
- Bienvenidos 3Document1 pageBienvenidos 3Jairo Cuervo GámezNo ratings yet
- Código de honor ingeniería químicaDocument1 pageCódigo de honor ingeniería químicaJairo Cuervo GámezNo ratings yet
- Contenidos Programaticos de Matematicas Aplicadas 2020-1 2Document4 pagesContenidos Programaticos de Matematicas Aplicadas 2020-1 2Jairo Cuervo GámezNo ratings yet
- Bienvenidos 3Document1 pageBienvenidos 3Jairo Cuervo GámezNo ratings yet
- Movimientos de cuentas auxiliares del Caribe S.A.S. entre junio y julio de 2017Document1 pageMovimientos de cuentas auxiliares del Caribe S.A.S. entre junio y julio de 2017Jairo Cuervo GámezNo ratings yet
- Unidad A Matematicas Aplicadas A La Ingenieria Quimica 2020 - 1 5Document8 pagesUnidad A Matematicas Aplicadas A La Ingenieria Quimica 2020 - 1 5Jairo Cuervo GámezNo ratings yet
- Agregados Aqa Del Caribe CXC Ultimo Enero 2018Document4 pagesAgregados Aqa Del Caribe CXC Ultimo Enero 2018Jairo Cuervo GámezNo ratings yet
- CORREGIDO - G467 - Anexo 1 Ejercicios Tarea 1Document36 pagesCORREGIDO - G467 - Anexo 1 Ejercicios Tarea 1Angie tatiana Avella vargasNo ratings yet
- CINEMÁTICA DE LA PARTÍCULADocument2 pagesCINEMÁTICA DE LA PARTÍCULALih JulietteNo ratings yet
- 07 Silabo de Álgebra Lineal IDocument7 pages07 Silabo de Álgebra Lineal ILuis RiscoNo ratings yet
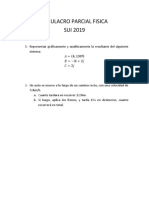
- Simulacro Parcial FisicaDocument2 pagesSimulacro Parcial FisicaCristian CabañasNo ratings yet
- MTSE U1 ContenidoDocument11 pagesMTSE U1 ContenidoBryan AlemanNo ratings yet
- Que Ocurre Cuando La Velocidad CambiaDocument10 pagesQue Ocurre Cuando La Velocidad CambiaContreras MoisesNo ratings yet
- "Vector de Posición": Instituto Politécnico NacionalDocument13 pages"Vector de Posición": Instituto Politécnico NacionalNieto Barrera KatiaNo ratings yet
- Análisis VectorialDocument5 pagesAnálisis VectorialrcalienesNo ratings yet
- Ejercicios Capitulo 1Document8 pagesEjercicios Capitulo 1Marco Rivera0% (1)
- Cartilla UNIDAD 4 Fisica 1 - (Ejercicios)Document17 pagesCartilla UNIDAD 4 Fisica 1 - (Ejercicios)Gonzalo Benjamin PerezNo ratings yet
- II 1P GB SolucionarioDocument4 pagesII 1P GB SolucionarioR Carlo ChNo ratings yet
- Ecuacion de MaxwellDocument12 pagesEcuacion de MaxwellROLY MAYO GODOYNo ratings yet
- Cap.1. Cálculo de Fuerzas Externas e InternasDocument36 pagesCap.1. Cálculo de Fuerzas Externas e InternasRobinson Alberto Morales GarciaNo ratings yet
- Presentación Unidad 1: Sistemas de Fuerzas Concentradas - UTN BADocument41 pagesPresentación Unidad 1: Sistemas de Fuerzas Concentradas - UTN BAJose JochuNo ratings yet
- Fisica Cero PDFDocument67 pagesFisica Cero PDFdiegobrtNo ratings yet
- ELECTROMAGNETISMODocument20 pagesELECTROMAGNETISMOKaren Silva GuzmanNo ratings yet
- (N) Producto Vectorial y Producto EscalarDocument3 pages(N) Producto Vectorial y Producto EscalarErwin Chavez FloresNo ratings yet
- Quiz 2Document26 pagesQuiz 2willyNo ratings yet
- Adicion de FuerzasDocument6 pagesAdicion de FuerzasNicolas RuizNo ratings yet
- Departamento de Ciencia Básicas Curso Física I: Docente E-MailDocument15 pagesDepartamento de Ciencia Básicas Curso Física I: Docente E-MailYirley lucasNo ratings yet
- Mesa Fuerzas Fisica Mecanica 1.en - EsDocument12 pagesMesa Fuerzas Fisica Mecanica 1.en - EsDaniela GarcíaNo ratings yet
- Dinamica Circular FisicaDocument16 pagesDinamica Circular FisicaOscar Exequiel Jesus Apablaza FerradaNo ratings yet
- Examen de Vectores y CinemáticaDocument2 pagesExamen de Vectores y CinemáticaMario RojasNo ratings yet
- Cantidades Grandes y PequeñasDocument8 pagesCantidades Grandes y PequeñasBiter Alvaro Guevara TiradoNo ratings yet
- Etabs GuiaDocument48 pagesEtabs Guiapyz100% (1)
- 05 AreasDocument3 pages05 AreasJosue Isac Salomon LandaNo ratings yet
- Ejercicios de SesiónDocument5 pagesEjercicios de SesiónSantiago Carballo SánchezNo ratings yet
- Mafalda 1Document152 pagesMafalda 1Roxana ColazoNo ratings yet
- Taller - Fin de Unidad IiiDocument3 pagesTaller - Fin de Unidad IiiJonathan PesantezNo ratings yet