You might also like
- Diagramas y Polifonías. Experiencias de PensamientoFrom EverandDiagramas y Polifonías. Experiencias de PensamientoNo ratings yet
- Monografia Cinematica de Una ParticulaDocument12 pagesMonografia Cinematica de Una ParticulaIgn Quispe Flores100% (2)
- Fenomeno Termico - ElectrostaticaDocument7 pagesFenomeno Termico - ElectrostaticaLuis Enrique MPNo ratings yet
- 05 Conservación de La Energía MecánicaDocument5 pages05 Conservación de La Energía MecánicaCarlos Edgardo Rodriguez BenitesNo ratings yet
- Mec - Fluidos2021 - Clase 1.1Document68 pagesMec - Fluidos2021 - Clase 1.1Janet HuaracaNo ratings yet
- Ejercicios CinematicaDocument4 pagesEjercicios CinematicaYomi CeronNo ratings yet
- Diseño de mezcla de concreto de 280kg/cm2 para columnas utilizando el método ACI 211Document34 pagesDiseño de mezcla de concreto de 280kg/cm2 para columnas utilizando el método ACI 211juanNo ratings yet
- Fuerza y trabajo en bloques y resortesDocument12 pagesFuerza y trabajo en bloques y resortesLuis TeheranNo ratings yet
- Amasado Por SaturacionDocument5 pagesAmasado Por SaturacionVicTor VasquezNo ratings yet
- Trabajo 11Document3 pagesTrabajo 11Bryan Andre CotradoNo ratings yet
- Laboratorio Virtual #06. Leyes de Los Gases Ideales. Física de La Masa y La Energía. Ciclo 2021 - IIDocument38 pagesLaboratorio Virtual #06. Leyes de Los Gases Ideales. Física de La Masa y La Energía. Ciclo 2021 - IIVioleta Cobeñas RodriguezNo ratings yet
- DemostracionesDocument3 pagesDemostracionesJose Gomez DiazNo ratings yet
- Estabilidad y empuje cuerpo flotanteDocument7 pagesEstabilidad y empuje cuerpo flotanteAndrés CabreraNo ratings yet
- Ejercicios de Dinamica PropuestosDocument7 pagesEjercicios de Dinamica PropuestosHernan RuizNo ratings yet
- Minimos CuadradosDocument8 pagesMinimos CuadradosRaul GrajedaNo ratings yet
- Práctica Experimental #08. Principio de Conservación de Energía Mecánica. Física de Los Cuerpos Rígidos. Ciclo 2019 - I - MvsDocument13 pagesPráctica Experimental #08. Principio de Conservación de Energía Mecánica. Física de Los Cuerpos Rígidos. Ciclo 2019 - I - MvsManuel ventura suclupeNo ratings yet
- 13 Bernoulli MF PDFDocument18 pages13 Bernoulli MF PDFMJ FerNo ratings yet
- G9 OndasDocument4 pagesG9 OndasFelipeMl0% (1)
- DinamicaDocument60 pagesDinamicaMisael SantiagoNo ratings yet
- Pendulo Fisica 1 Marco TeoricoDocument6 pagesPendulo Fisica 1 Marco TeoricoDeboraNo ratings yet
- Descarga Vertical Por OrificiosDocument35 pagesDescarga Vertical Por OrificiosAldair Flores CusmaNo ratings yet
- Demostración de La Altura MetacéntricaDocument18 pagesDemostración de La Altura MetacéntricaMelissa BerasNo ratings yet
- TEORIA de Momento de InerciaDocument6 pagesTEORIA de Momento de Inerciajpdavila205No ratings yet
- 1.problemas de MASDocument27 pages1.problemas de MASRocio JulcaNo ratings yet
- Laboratorio Limites GeotécniaDocument24 pagesLaboratorio Limites GeotécniaDiego Arley Valero LopezNo ratings yet
- Informe Conservacion de La Energia Mecanica 8Document10 pagesInforme Conservacion de La Energia Mecanica 8David BryanNo ratings yet
- Capitulo 1 Elasticidad 2015 1Document78 pagesCapitulo 1 Elasticidad 2015 1RENZO RENATO VELASQUEZ LOLINo ratings yet
- Momento de Inercia ExperimentalDocument16 pagesMomento de Inercia ExperimentalJulio Samaniego0% (1)
- Bateria 1 PGeoDocument5 pagesBateria 1 PGeoRhonny PachacamaNo ratings yet
- Ecuaciones Diferenciales AplicadasDocument7 pagesEcuaciones Diferenciales AplicadasJhon RengifoNo ratings yet
- Problemas de Mecánica de fluidos y presión hidráulicaDocument2 pagesProblemas de Mecánica de fluidos y presión hidráulicaCamila Gutiérrez MacíasNo ratings yet
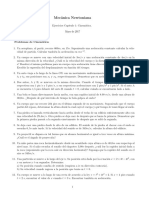
- Mecanica NewtonianaDocument13 pagesMecanica NewtonianaMarco Saw0% (1)
- Movimiento UnidimensionalDocument32 pagesMovimiento UnidimensionalHernando Ceballos100% (2)
- Fisica Sexto SAN MARCOS 3Document13 pagesFisica Sexto SAN MARCOS 3Fabricio Melgarejo RamosNo ratings yet
- Hidrostática: Principios básicos de presión y fuerzas en fluidos en reposoDocument16 pagesHidrostática: Principios básicos de presión y fuerzas en fluidos en reposoJean Pool ApazaNo ratings yet
- Proyecto Final de DinamicaDocument10 pagesProyecto Final de DinamicaJosé AguilarNo ratings yet
- Tema 13 Cinematica Del PuntoDocument33 pagesTema 13 Cinematica Del PuntoMabel Goicochea BancesNo ratings yet
- Cantidad de Movimiento Angular e Impulso AngularDocument13 pagesCantidad de Movimiento Angular e Impulso AngularJoshua Garcia LombardiNo ratings yet
- Fuerzas Internas y ExternasDocument8 pagesFuerzas Internas y Externasjacciel santanaNo ratings yet
- Problema 71 y 73Document2 pagesProblema 71 y 73kevinNo ratings yet
- S1 LosfluidosaplicacionDocument4 pagesS1 LosfluidosaplicacionLincolNo ratings yet
- Ejercicios de estructuras planas y armaduras de techoDocument11 pagesEjercicios de estructuras planas y armaduras de techoLuis Fernando Saavedra DiazNo ratings yet
- Módulo de Young cinta adhesiva UNAMDocument17 pagesMódulo de Young cinta adhesiva UNAMMIGUEL ANGEL BECERRA REGALADONo ratings yet
- Problemas de DesarrolloDocument30 pagesProblemas de DesarrolloJairo Zavala FloresNo ratings yet
- FU-01 Estatica de FluidosDocument25 pagesFU-01 Estatica de Fluidosjhenser7gonzales7de7No ratings yet
- Actividad #01. Movimiento Armónico SimpleDocument4 pagesActividad #01. Movimiento Armónico Simplerosangela arbañil becerraNo ratings yet
- Velocidad RadialDocument7 pagesVelocidad RadialEdgar AlfaroNo ratings yet
- Conservación energía mecánica experimento esferaDocument6 pagesConservación energía mecánica experimento esferamarloncitopzjtNo ratings yet
- Informe Grupal #8Document3 pagesInforme Grupal #8Jairo Andrés BonillaNo ratings yet
- Segundo Examen Parcial de Mecanica AnaliticaDocument2 pagesSegundo Examen Parcial de Mecanica AnaliticaanthonyNo ratings yet
- CAPITULO VI. - Teoria Cinetica de Los Gases-II - TERMODINAMICA PDFDocument22 pagesCAPITULO VI. - Teoria Cinetica de Los Gases-II - TERMODINAMICA PDFMaribel Alvarez QuispeNo ratings yet
- P 09 Equilibrio de Fuerzas Generales 2D - 2018-Ii PDFDocument10 pagesP 09 Equilibrio de Fuerzas Generales 2D - 2018-Ii PDFmiguelNo ratings yet
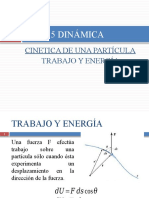
- CIV 315-PPT6-Cinética de Partículas Trabajo y EnergíaDocument27 pagesCIV 315-PPT6-Cinética de Partículas Trabajo y EnergíaJason TrochezNo ratings yet
- Informe ElectrostaticaDocument17 pagesInforme ElectrostaticaChelsea SánchezNo ratings yet
- Luctuala Taller 3,6Document1 pageLuctuala Taller 3,6Mireya LuctualaNo ratings yet
- UntitledDocument8 pagesUntitledVictoria BurgosNo ratings yet
- 02 Laboratorio Virtual Principio de ArquimedesDocument4 pages02 Laboratorio Virtual Principio de ArquimedesJair LópezNo ratings yet
- Demostraciones de Las Fórmulas de Trabajo y Energía Respecto A Un PuntoDocument7 pagesDemostraciones de Las Fórmulas de Trabajo y Energía Respecto A Un PuntoJuan Daniel Begazo VargasNo ratings yet
- Movimiento oscilatorio: periodo, frecuencia y ecuacionesDocument8 pagesMovimiento oscilatorio: periodo, frecuencia y ecuacionesRicardo Felipe Cortes MenayNo ratings yet
- TRABAJO Fen Meno de Vorticidad en Un TuboDocument10 pagesTRABAJO Fen Meno de Vorticidad en Un TuboNicolay Abanto HuertaNo ratings yet
- Cuando Cicerón Encontró La Tumba de Arquímedes en SiracusaDocument7 pagesCuando Cicerón Encontró La Tumba de Arquímedes en SiracusaErnesto Fabián Gandolfo RasoNo ratings yet
- Carl RogersDocument15 pagesCarl RogersErnesto Fabián Gandolfo RasoNo ratings yet
- Aprende A Confiar en Lo Que Está OcurriendoDocument1 pageAprende A Confiar en Lo Que Está OcurriendoErnesto Fabián Gandolfo RasoNo ratings yet
- Comentarios Psicologicos Sobre Las Enseñanzas de Gurdjieff y Ouspenski VOL 1 PDFDocument383 pagesComentarios Psicologicos Sobre Las Enseñanzas de Gurdjieff y Ouspenski VOL 1 PDFGabriel Awad100% (2)
- Cono CimientoDocument1 pageCono CimientoErnesto Fabián Gandolfo RasoNo ratings yet
- Compendio Del Abhidhamma 2Document24 pagesCompendio Del Abhidhamma 2epanamaNo ratings yet
- BudhhaDocument4 pagesBudhhaErnesto Fabián Gandolfo RasoNo ratings yet
- Cómo Medir El Nivel de Una Ruta de SenderismoDocument1 pageCómo Medir El Nivel de Una Ruta de SenderismoErnesto Fabián Gandolfo RasoNo ratings yet
- Charles Howard HintonDocument2 pagesCharles Howard HintonErnesto Fabián Gandolfo RasoNo ratings yet
- Dàodé JīngDocument7 pagesDàodé JīngErnesto Fabián Gandolfo RasoNo ratings yet
- Compendio Del Abhidhamma 2Document24 pagesCompendio Del Abhidhamma 2epanamaNo ratings yet
- Frases de Buda Que Cambiarán Tu VidaDocument5 pagesFrases de Buda Que Cambiarán Tu VidaErnesto Fabián Gandolfo RasoNo ratings yet
- Comentarios Psicologicos Sobre Las Enseñanzas de Gurdjieff y Ouspenski VOL 1 PDFDocument383 pagesComentarios Psicologicos Sobre Las Enseñanzas de Gurdjieff y Ouspenski VOL 1 PDFGabriel Awad100% (2)
- Análisis Del Discurso y de La Traducción de Milinda PanháDocument149 pagesAnálisis Del Discurso y de La Traducción de Milinda PanháErnesto Fabián Gandolfo RasoNo ratings yet
- Ondas Gravitatorias IDocument4 pagesOndas Gravitatorias IErnesto Fabián Gandolfo RasoNo ratings yet
- Alan WattsDocument4 pagesAlan WattsErnesto Fabián Gandolfo RasoNo ratings yet
- 180 DiferenciabilidadDocument5 pages180 Diferenciabilidadpablo_palaciosNo ratings yet
- Budismo para Principiantes - Stephen Asma - TextDocument162 pagesBudismo para Principiantes - Stephen Asma - TextErnesto Fabián Gandolfo Raso50% (2)
- 1 FormaDocument3 pages1 FormaSantiago AristizábalNo ratings yet
- Filosofía Del Espacio y El TiempoDocument22 pagesFilosofía Del Espacio y El TiempoErnesto Fabián Gandolfo RasoNo ratings yet
- Problemas - Ondas MecanicasDocument6 pagesProblemas - Ondas MecanicasErnesto Fabián Gandolfo RasoNo ratings yet
- LogicismoDocument3 pagesLogicismoErnesto Fabián Gandolfo RasoNo ratings yet
- Fluid OsDocument12 pagesFluid OsErnesto Fabián Gandolfo RasoNo ratings yet
- Efecto ForerDocument3 pagesEfecto ForerRonald ÑauriNo ratings yet
- Respecto A La Llamada Psicología Basada en La EvidenciaDocument1 pageRespecto A La Llamada Psicología Basada en La EvidenciaErnesto Fabián Gandolfo RasoNo ratings yet
- Nociones Básicas Cálculo TensorialDocument33 pagesNociones Básicas Cálculo Tensorialperlmanbashmet279No ratings yet
- Beamex White Paper - Traceability in Calibration ESPDocument5 pagesBeamex White Paper - Traceability in Calibration ESPleonardq1No ratings yet
- Conjunto ConexoDocument4 pagesConjunto ConexoErnesto Fabián Gandolfo RasoNo ratings yet
- Perelman, Y - Ciencia Popular - Sabe Usted Fisica (Mir) PDFDocument370 pagesPerelman, Y - Ciencia Popular - Sabe Usted Fisica (Mir) PDFsigmaluzNo ratings yet
- Surgimiento Filosofia AnaliticaDocument15 pagesSurgimiento Filosofia AnaliticaErnesto Fabián Gandolfo RasoNo ratings yet
- Disección ojo vacuno laboratorio biologíaDocument7 pagesDisección ojo vacuno laboratorio biologíaYoselin LlonconNo ratings yet
- Los Mándalas Del ZodiacoDocument2 pagesLos Mándalas Del Zodiacoeatableattorney66No ratings yet
- Sistemas Materiales. EjercitaciónDocument3 pagesSistemas Materiales. EjercitaciónCristina BenayNo ratings yet
- Aprovechamientos Hidroeléctricos y de BombeoDocument408 pagesAprovechamientos Hidroeléctricos y de BombeoLuis David Cando100% (2)
- Lugares Mas FriosDocument3 pagesLugares Mas Frios22alexanderNo ratings yet
- Modulo Calculo Integral UNADDocument4 pagesModulo Calculo Integral UNADJORGE PACHECONo ratings yet
- Capitulo 3 Tablero Electrico EjemploDocument11 pagesCapitulo 3 Tablero Electrico EjemploAngelo Tito MNo ratings yet
- El Modelo IS - LMDocument15 pagesEl Modelo IS - LMSamir Gomez0% (1)
- Medidas de capacidad y volumenDocument12 pagesMedidas de capacidad y volumenJamie Lucia Gutierrez MilanoNo ratings yet
- P50 1 (4PP) Es (0213)Document4 pagesP50 1 (4PP) Es (0213)Sara RamirezNo ratings yet
- Práctica 1. Determinación de La Capacidad CaloríficaDocument17 pagesPráctica 1. Determinación de La Capacidad CaloríficaKarina Gabriel FloresNo ratings yet
- Examen Mensual de NoviembreDocument21 pagesExamen Mensual de NoviembreRuben Jack Mallqui ChinchayNo ratings yet
- Determinación Del Carácter NormalDocument34 pagesDeterminación Del Carácter NormalCristiam Loayza RoaNo ratings yet
- TECNOLOGIADocument22 pagesTECNOLOGIALeonardo Omar CamposNo ratings yet
- 01 Wirtgen Gama Completa ProductosDocument20 pages01 Wirtgen Gama Completa ProductosMaría Fernanda ReyesNo ratings yet
- Presion Osmotica en EritrocitosDocument15 pagesPresion Osmotica en EritrocitosRodrigo AvilaNo ratings yet
- DrywallDocument35 pagesDrywallAltamiranoKarina100% (1)
- Diapositivas Presa en ArcoDocument43 pagesDiapositivas Presa en ArcodarioNo ratings yet
- 3-6-19 1er Parcial - Metodologia AnalisisDocument15 pages3-6-19 1er Parcial - Metodologia AnalisisDariana OsuchNo ratings yet
- Medición de temperatura con termómetrosDocument11 pagesMedición de temperatura con termómetrosJuan Esteban Parra HenaoNo ratings yet
- Proyecto CARGADORDocument22 pagesProyecto CARGADORVinicio TigseNo ratings yet
- Disponibilidad MantenimientoDocument23 pagesDisponibilidad MantenimientoMirella Ivonee Q MachacaNo ratings yet
- Clase No 6. LAS SOLUCIONES. Parte 2.Document4 pagesClase No 6. LAS SOLUCIONES. Parte 2.luis angel mancera caroNo ratings yet
- Clase 3 TecnDocument5 pagesClase 3 TecnCarlo MartinezNo ratings yet
- Himnario Majestuoso CompletoDocument1 pageHimnario Majestuoso Completoalonso2josue2chuman2No ratings yet
- Especificaciones Tecnicas OkDocument39 pagesEspecificaciones Tecnicas OkRobert LlgxNo ratings yet
- Unidad 10 DISTRIBUCIÓN NORMAL PDFDocument10 pagesUnidad 10 DISTRIBUCIÓN NORMAL PDFGerald CuzcanoNo ratings yet
- Altimetria Con Teodolito PDFDocument16 pagesAltimetria Con Teodolito PDFleylaNo ratings yet
- Cables TensionDocument23 pagesCables TensiongualbertoNo ratings yet
- Taller Semana 2 Fundamentos de La Quimica Ginna Paola Retavizca GonzalezDocument6 pagesTaller Semana 2 Fundamentos de La Quimica Ginna Paola Retavizca GonzalezPAOLANo ratings yet