You might also like
- Plan Terapeutico y Sesiones Terapéuticas TODASDocument10 pagesPlan Terapeutico y Sesiones Terapéuticas TODASDiego González92% (12)
- Examen RoboticaDocument2 pagesExamen RoboticaEdison MalacaraNo ratings yet
- Mantenimiento en Los Estados FinancierosDocument29 pagesMantenimiento en Los Estados FinancierosOrlandoRiosNo ratings yet
- Cuarta UnidadDocument86 pagesCuarta Unidadgladiadores21No ratings yet
- Controladores LogicosDocument13 pagesControladores Logicosanon_232847364No ratings yet
- Programacion de La HipertofiaDocument23 pagesProgramacion de La HipertofiaEdu Lopez-Vegue DiezNo ratings yet
- Descriptor Sistemas de Control AutomaticoDocument4 pagesDescriptor Sistemas de Control AutomaticoCiudad De Las CabrasNo ratings yet
- Lubricacion Con AceiteDocument31 pagesLubricacion Con AceiteRoyman BernalNo ratings yet
- T - Metodo de Mandolina-En Español Prueba - 1Document23 pagesT - Metodo de Mandolina-En Español Prueba - 1Alex MataNo ratings yet
- Anexo 7 RVOESO-02 Al 09Document99 pagesAnexo 7 RVOESO-02 Al 09Monica Ao100% (5)
- Manual Practicas Diseño Asistido Por ComputadoraDocument54 pagesManual Practicas Diseño Asistido Por ComputadoraFraOrz50% (2)
- Marx - Tesis Sobre FeuerbachDocument4 pagesMarx - Tesis Sobre FeuerbachNicolás AldunateNo ratings yet
- Cuadro ComparativoDocument7 pagesCuadro ComparativoJonathan Manoatl100% (1)
- Sistemas Monofasicos J Bifasicos y TrifasicosDocument13 pagesSistemas Monofasicos J Bifasicos y TrifasicosBernardo PerezNo ratings yet
- Apuntes de Electricidad y Electronica IndustrialDocument33 pagesApuntes de Electricidad y Electronica IndustrialCesar CervantesNo ratings yet
- GLUZMAN, G. - Mujeres y Arte en La Buenos Aires Del Siglo XIX - TesisDocument324 pagesGLUZMAN, G. - Mujeres y Arte en La Buenos Aires Del Siglo XIX - TesisAimé Lescano100% (2)
- MODULAR Diseño y Simulación de Sistemas DinamicosDocument10 pagesMODULAR Diseño y Simulación de Sistemas Dinamicosjonhatan montelongo medinaNo ratings yet
- Clasificacion de Las Prensas o TroqueladorasDocument2 pagesClasificacion de Las Prensas o TroqueladorasAlexis CastilloNo ratings yet
- Mantenimiento Mecatrónico Clase 1Document56 pagesMantenimiento Mecatrónico Clase 1Christian BaldeonNo ratings yet
- Como Aprender Inglés y No Morir en El Intento PDFDocument14 pagesComo Aprender Inglés y No Morir en El Intento PDFturquestanNo ratings yet
- Automatización de Sistemas ElectromecánicosDocument23 pagesAutomatización de Sistemas ElectromecánicosSegundo C. G.0% (1)
- Rascovan - Cap. 1, Entre Adolescentes, Jovénes y AdultosDocument15 pagesRascovan - Cap. 1, Entre Adolescentes, Jovénes y AdultosDanila Desirée40% (5)
- Como Se Instala Office 2010 Paso A PasoDocument4 pagesComo Se Instala Office 2010 Paso A PasoAlma SilvaNo ratings yet
- InstallDocument8 pagesInstallJavier Juarez AlcantaraNo ratings yet
- Actividad 4 Parcial 1 Brandon Alberto Castillo CruzDocument2 pagesActividad 4 Parcial 1 Brandon Alberto Castillo CruzBrandon Alberto CastilloNo ratings yet
- Electricidad y Electronica IndustrialDocument9 pagesElectricidad y Electronica IndustrialJuan Carlos Suárez Guillén100% (2)
- Practica CNC FresadoraDocument10 pagesPractica CNC FresadoraTony MunsterNo ratings yet
- U3 Resultado Aprendizaje Maquinas y Mecanismos Selección de TrasmisiónDocument21 pagesU3 Resultado Aprendizaje Maquinas y Mecanismos Selección de TrasmisiónNyro Beats100% (1)
- 5 Consejos para Darle Mantenimiento Al MultímetroDocument4 pages5 Consejos para Darle Mantenimiento Al MultímetroKary Sangines100% (1)
- La Electromecánica en Mi VidaDocument3 pagesLa Electromecánica en Mi VidaJosé DavidNo ratings yet
- Sistemas MecanicosDocument14 pagesSistemas MecanicosJose Bazan ValleNo ratings yet
- 2 Clase Mecánica IndustrialDocument16 pages2 Clase Mecánica Industrialedgardo garces100% (1)
- Práctica 12 Motores y RelevadoresDocument8 pagesPráctica 12 Motores y RelevadoresAdrián ZatarainNo ratings yet
- Proyecto Final. - Máquinas y MecánismosDocument6 pagesProyecto Final. - Máquinas y MecánismosVictor MorenoNo ratings yet
- Administración Estratégica para MantenimientoDocument17 pagesAdministración Estratégica para MantenimientoAmy Ramirez Lopez LoopezNo ratings yet
- Control y Automatizacion de Procesos PDFDocument2 pagesControl y Automatizacion de Procesos PDFJorge Daniel Menendez LopezNo ratings yet
- Cuestionario de ManufacturaDocument3 pagesCuestionario de Manufacturahazz22100% (1)
- IEDS - Hidroenergía - V2 2019Document63 pagesIEDS - Hidroenergía - V2 2019Marcos Mendoza MejiaNo ratings yet
- Electricidad IndustrialDocument3 pagesElectricidad IndustrialOrlando Herrada0% (1)
- MANUAL de Practicas de Control IIDocument25 pagesMANUAL de Practicas de Control IIIngrid AgNo ratings yet
- Características de La Respuesta de Un SistemaDocument4 pagesCaracterísticas de La Respuesta de Un SistemaCarlos Emilio BañoNo ratings yet
- Qué Es El Voltaje de Circuito AbiertoDocument3 pagesQué Es El Voltaje de Circuito AbiertoWilly TurdoNo ratings yet
- Solución Gráfica Al Problema de PosiciónDocument2 pagesSolución Gráfica Al Problema de PosiciónAarón LaraNo ratings yet
- RodamientosDocument22 pagesRodamientosMirian CastilloNo ratings yet
- Cunas y Cuneros EstandarDocument2 pagesCunas y Cuneros EstandarAndres Mauricio Villalobos Farello100% (1)
- Sistemas de Control de 1er 2do y Orden SuperiorDocument13 pagesSistemas de Control de 1er 2do y Orden SuperiorKaren AlvarezNo ratings yet
- Arranque y Paro de Un Motor Con RelevadorDocument2 pagesArranque y Paro de Un Motor Con RelevadorBriannda Moraless0% (1)
- Analisis de Tolerancias GeometricasDocument16 pagesAnalisis de Tolerancias GeometricasEdson MarquezNo ratings yet
- Estructuras Básicas de LabVIEWDocument13 pagesEstructuras Básicas de LabVIEWDaniel BarrazaNo ratings yet
- Práctica Working ModelDocument2 pagesPráctica Working ModelAlberto Perez VieitesNo ratings yet
- Diseño de Elemtos MecanicosDocument85 pagesDiseño de Elemtos MecanicosIsaacAparicioNo ratings yet
- Mecanismos ArticuladosDocument31 pagesMecanismos ArticuladosFrancisco Javier Villate GaonaNo ratings yet
- 2.1 Materiales FerrososDocument8 pages2.1 Materiales FerrososSantiago DhisckcesithoNo ratings yet
- Oacy Act1 Diseño de HerramentalesDocument13 pagesOacy Act1 Diseño de HerramentalesObed Armando Cabrera YbarraNo ratings yet
- Que Es GrafcetDocument23 pagesQue Es GrafcetAlex Pilcolora MendozaNo ratings yet
- EngranajesDocument64 pagesEngranajesAraceli Pérez AlcántaraNo ratings yet
- Cuestionario Unidad 4 de Tec. de Los MaterialesDocument2 pagesCuestionario Unidad 4 de Tec. de Los MaterialesRodolfo Santiago HernandezNo ratings yet
- Formulario Electrotecnia 2Document4 pagesFormulario Electrotecnia 2Abdias ChavezNo ratings yet
- Investigar Acerca de Las Flechas de Las Maquinas, Como Se Calculan Los Diametros y de Que Materiales Se FabricanDocument13 pagesInvestigar Acerca de Las Flechas de Las Maquinas, Como Se Calculan Los Diametros y de Que Materiales Se FabricanIsrael Rocha SalazarNo ratings yet
- Cuestionario Equipo 2 OptoelectronicaDocument1 pageCuestionario Equipo 2 OptoelectronicaCésar CardenasNo ratings yet
- Velocidad Crítica en EjesDocument3 pagesVelocidad Crítica en EjesMiguelangel Rodriguez Barrios100% (1)
- Ensayo de 8D.Document11 pagesEnsayo de 8D.ALEJANDRA100% (2)
- Diseño de Algoritmos Basados en Problemas PDFDocument3 pagesDiseño de Algoritmos Basados en Problemas PDFJaime Cruz MartínezNo ratings yet
- Adquisición y Procesamiento de Datos Con LabViewDocument41 pagesAdquisición y Procesamiento de Datos Con LabViewHéctor Azcaray Rivera80% (5)
- Patrón de Diseño y MVCDocument12 pagesPatrón de Diseño y MVCKris MartinezNo ratings yet
- Mejoras Enfocadas Kobetsu Kaizen PDFDocument7 pagesMejoras Enfocadas Kobetsu Kaizen PDFmaria pia otarolaNo ratings yet
- Unidad I - Diagrama Cinemático - Santaella YDocument11 pagesUnidad I - Diagrama Cinemático - Santaella YYsaac YhofrenNo ratings yet
- Introducción A Los MecanismosDocument24 pagesIntroducción A Los Mecanismospepa peponaNo ratings yet
- Introduccià N A Los Mecanismos y A La Cinemã¡ticaDocument30 pagesIntroduccià N A Los Mecanismos y A La Cinemã¡ticaKaren Granados100% (1)
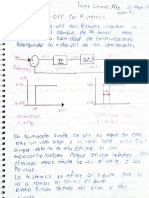
- Control On Off Con Histéresis, Jaime Limones Martinez PDFDocument3 pagesControl On Off Con Histéresis, Jaime Limones Martinez PDFJaime LMNo ratings yet
- Tipos de Comunicación FormalDocument8 pagesTipos de Comunicación FormalJaime LMNo ratings yet
- Central Hidroeléctrica ResumenDocument1 pageCentral Hidroeléctrica ResumenJaime LMNo ratings yet
- Reporte Seguidor de LineaDocument16 pagesReporte Seguidor de LineaJaime LMNo ratings yet
- El Método ArqueológicoDocument3 pagesEl Método Arqueológicodario gomezNo ratings yet
- Contrato TaDocument9 pagesContrato TaJose AlejoNo ratings yet
- Europa Una Herencia Que Obliga A Los CristianosDocument2 pagesEuropa Una Herencia Que Obliga A Los CristianosEzequiel Gonzalez100% (1)
- Un Algoritmo Matemático para La Carga Tridimensional Del Problema de Enrutamiento de Vehículos Capacitados (3L-CVRP)Document11 pagesUn Algoritmo Matemático para La Carga Tridimensional Del Problema de Enrutamiento de Vehículos Capacitados (3L-CVRP)Roger RodríguezNo ratings yet
- Escribir Cuentos Por Flannery O'ConnorDocument3 pagesEscribir Cuentos Por Flannery O'ConnorluisagomezlNo ratings yet
- Psicopatologia de Atencion y OrientacionDocument30 pagesPsicopatologia de Atencion y OrientacionViseth Patilla ChirinosNo ratings yet
- Knox - Meditaciones (1) Te LlamaDocument3 pagesKnox - Meditaciones (1) Te Llamajlcabag2226No ratings yet
- 6 - ICM IntroducciOn Música Tradicional China Rafael CaroDocument6 pages6 - ICM IntroducciOn Música Tradicional China Rafael CaroBrenda Midori MuseNo ratings yet
- MRU Movimiento rectilíneo uniformemente variado (MRUV), es aquel en el que un móvil se desplaza sobre una trayectoria recta estando sometido a una aceleración constante. El movimiento de un cuerpo puede darse en una, dos formas y tres dimensiones. Si un cuerpo tiene un movimiento unidimensional y la trayectoria que describe es recta, el movimiento que este realiza se denomina rectilíneo.Document6 pagesMRU Movimiento rectilíneo uniformemente variado (MRUV), es aquel en el que un móvil se desplaza sobre una trayectoria recta estando sometido a una aceleración constante. El movimiento de un cuerpo puede darse en una, dos formas y tres dimensiones. Si un cuerpo tiene un movimiento unidimensional y la trayectoria que describe es recta, el movimiento que este realiza se denomina rectilíneo.Marco Antonio VilcaNo ratings yet
- Las Sociedades IrregularesDocument17 pagesLas Sociedades IrregularesLiion BackoNo ratings yet
- Conectores LógicosDocument14 pagesConectores LógicosFreddy VilcaNo ratings yet
- Páginas Desde150778289 Analisis Sismico de Edificios DR Roberto Aguiar FalconiDocument4 pagesPáginas Desde150778289 Analisis Sismico de Edificios DR Roberto Aguiar FalconiRivera JavierNo ratings yet
- Boudon Lazarsfeld - Metodologia de Las Ciencias SocialesDocument8 pagesBoudon Lazarsfeld - Metodologia de Las Ciencias SocialesFacu Nieto67% (3)
- Gestión Democrática Del Riesgo AmbientalDocument5 pagesGestión Democrática Del Riesgo AmbientalSaide Jimenez0% (1)
- Don Álvaro y La Fuerza Del SinoDocument2 pagesDon Álvaro y La Fuerza Del SinoMacarena DuránNo ratings yet
- El Lector ActivoDocument5 pagesEl Lector Activogameoverjv110% (1)
- Apreciación Crítica de Liderazgo EstrategicoDocument3 pagesApreciación Crítica de Liderazgo Estrategicomabel giovanna acevedo CorcueraNo ratings yet
- Sociedad DisciplinariaDocument2 pagesSociedad DisciplinariaEducacion ArtisticaNo ratings yet
- Teoría Del Aprendizaje ConductistaDocument12 pagesTeoría Del Aprendizaje Conductistaiglesia evangélica trinitariaNo ratings yet
- Proyecto LlaneridadDocument4 pagesProyecto Llaneridadalexgalvissoc86840% (1)
- Teoria de La InterculturalidadDocument11 pagesTeoria de La InterculturalidadGonzalo CastilloNo ratings yet
- Biografia Abraham MaslowDocument2 pagesBiografia Abraham MaslowStephany GallardoNo ratings yet