You might also like
- 12-Tablero de Conexiones para Relevadores Como Apoyo en Prácticas de Automatización de ProcesosDocument19 pages12-Tablero de Conexiones para Relevadores Como Apoyo en Prácticas de Automatización de Procesosorlando moraNo ratings yet
- Sistemas de control moderno volumen II: sistemas de tiempo discretoFrom EverandSistemas de control moderno volumen II: sistemas de tiempo discretoNo ratings yet
- 366 844 2 PBDocument21 pages366 844 2 PBLuceroMilagrosCubaMirandaNo ratings yet
- Mecatrónica - sistemas de control electrónico en la ingeniería mecánica y eléctricaFrom EverandMecatrónica - sistemas de control electrónico en la ingeniería mecánica y eléctricaRating: 5 out of 5 stars5/5 (3)
- 15-Equipo Didáctico para Control y Monitoreo de TemperaturaDocument11 pages15-Equipo Didáctico para Control y Monitoreo de Temperaturaorlando moraNo ratings yet
- 414 1034 2 PBDocument23 pages414 1034 2 PBSheyla Janett Tapia GarciaNo ratings yet
- Aplicación de tecnologías para la sustentabilidad y su impacto en el medio ambiente y la sociedad: Trabajo colaborativo de Cuerpos Académicos e Investigadores de Puebla, Tlaxcala, Oaxaca y Veracruz, México, Carabobo, Venezuela y Huancavelica, Perú de la Red de Investigación Multidisciplinaria para el Desarrollo RegionalFrom EverandAplicación de tecnologías para la sustentabilidad y su impacto en el medio ambiente y la sociedad: Trabajo colaborativo de Cuerpos Académicos e Investigadores de Puebla, Tlaxcala, Oaxaca y Veracruz, México, Carabobo, Venezuela y Huancavelica, Perú de la Red de Investigación Multidisciplinaria para el Desarrollo RegionalNo ratings yet
- 407 1006 2 PBDocument18 pages407 1006 2 PBGeorge OlivierNo ratings yet
- Integra Dora PDFDocument22 pagesIntegra Dora PDFLuz FuentesNo ratings yet
- Analisis Del Rendimiento de ProcesadoresDocument14 pagesAnalisis Del Rendimiento de ProcesadoresCarrillo Zúñiga Quirino IsaíasNo ratings yet
- Simulación Automática de Fallas en SistemasDocument12 pagesSimulación Automática de Fallas en SistemasJaimeNo ratings yet
- 2 Irving Ulises Hernandez Miguel 112Document22 pages2 Irving Ulises Hernandez Miguel 112Armando Galarza SarmientoNo ratings yet
- Taller de Sistemas Operativos PDFDocument11 pagesTaller de Sistemas Operativos PDFAntonio Cadena100% (2)
- Manual de ArenaDocument73 pagesManual de ArenaYovani GarduñoNo ratings yet
- Tesis Mauro 2006Document245 pagesTesis Mauro 2006Cristian Andre Lincoñir LilloNo ratings yet
- InformeDocument8 pagesInformeSantos JuanNo ratings yet
- Guia 3 Realizar Montajes Con Equipos para La AutomatizacionDocument8 pagesGuia 3 Realizar Montajes Con Equipos para La Automatizacionluis carlos cameloNo ratings yet
- AE038 InstrumentacionDocument11 pagesAE038 InstrumentacionMauro Saucedo TellezNo ratings yet
- Ultrasonido Industial Usando Brazo RoboticoDocument15 pagesUltrasonido Industial Usando Brazo RoboticoSaul Leonidas Astocaza AntonioNo ratings yet
- Protocolo Final: Taller de Investigación IDocument13 pagesProtocolo Final: Taller de Investigación IRoberto Carlos Dzul ChinNo ratings yet
- Formato Protocolo Proyecto InvestigacionDocument8 pagesFormato Protocolo Proyecto InvestigacionElprincipe DeLa Dulce PenaNo ratings yet
- Rola Diseño PDFDocument16 pagesRola Diseño PDFtipunfmNo ratings yet
- Sistema Basado en Inteligencia Artificial para El Diagnóstico Sobre Tipos de Cólicos en Equinos Desarrollado en PrologDocument11 pagesSistema Basado en Inteligencia Artificial para El Diagnóstico Sobre Tipos de Cólicos en Equinos Desarrollado en PrologLeonardo JesusNo ratings yet
- MecatroniaDocument9 pagesMecatroniaJorge Alberto Velazquez CortesNo ratings yet
- ARTIGO - Desarrollo de Un Prototipo Didáctico para Red CANDocument10 pagesARTIGO - Desarrollo de Un Prototipo Didáctico para Red CANDAN_73No ratings yet
- PradaVillamizar TesisMaestriaPDFADocument111 pagesPradaVillamizar TesisMaestriaPDFAArmin Iban Illatarco CondoriNo ratings yet
- Timbre AutomaticoDocument99 pagesTimbre AutomaticoYlver Prado Yesquen67% (3)
- Capítulo II, Grupo 4Document9 pagesCapítulo II, Grupo 4Adela RodriguezNo ratings yet
- AUTOMOTRIZDocument14 pagesAUTOMOTRIZAlexandra QuijiaNo ratings yet
- Practica 14 - Mecanismos - Reporte de Practica Banda TransportadoraDocument9 pagesPractica 14 - Mecanismos - Reporte de Practica Banda TransportadoraJuan Manuel Antonio RitaNo ratings yet
- 7985Document376 pages7985Leonardo QuispeNo ratings yet
- Automatizacion de Un Clasificador de Paquetes Por TamañoDocument23 pagesAutomatizacion de Un Clasificador de Paquetes Por TamañoIvan RamosNo ratings yet
- Proyecto Entrenador - 16f977aDocument66 pagesProyecto Entrenador - 16f977aJuan Carlos Bernal CalzadaNo ratings yet
- Diseño de Tarjeta Electrónica Genérica para El Control de Motores TrifásicosDocument11 pagesDiseño de Tarjeta Electrónica Genérica para El Control de Motores TrifásicosSantos DiazNo ratings yet
- Arquitectura Exible Basada en ISA 88 para El Diseño Del Diagrama de Control de Ejecución en Aplicaciones Distribuidas Usando IEC 61499Document18 pagesArquitectura Exible Basada en ISA 88 para El Diseño Del Diagrama de Control de Ejecución en Aplicaciones Distribuidas Usando IEC 61499Jose GuerraNo ratings yet
- Semáforos Inteligentes en Av. Nicolás DueñasDocument21 pagesSemáforos Inteligentes en Av. Nicolás DueñasRoberto Obregón BarturénNo ratings yet
- Micro Portafolio Tema 5Document19 pagesMicro Portafolio Tema 5Aurea CastellanosNo ratings yet
- AE009 Control IDocument14 pagesAE009 Control IAlexrouterNo ratings yet
- Controlador Multieje de PosicionamientoDocument22 pagesControlador Multieje de PosicionamientoAriel MelladoNo ratings yet
- Actividad PatronesFactoryDocument5 pagesActividad PatronesFactoryHeidy BarcenasNo ratings yet
- Sa SOMI34 15Document18 pagesSa SOMI34 15Mario Alberto Mendoza BárcenasNo ratings yet
- Mecanica AutomotrizDocument12 pagesMecanica AutomotrizJohann NorbertNo ratings yet
- 2024 - 1 Act ProfundizacionDocument3 pages2024 - 1 Act ProfundizacionSamuel GámezNo ratings yet
- Taller de Sistemas Operativos Temario PDFDocument11 pagesTaller de Sistemas Operativos Temario PDFKarlaRodriguezNo ratings yet
- EP1 Reporte CAN Samuel SuarezDocument15 pagesEP1 Reporte CAN Samuel SuarezCesar Rafael Vargas MurilloNo ratings yet
- Caso 1 - Cableado Estructurado-1Document31 pagesCaso 1 - Cableado Estructurado-1ALEXNo ratings yet
- Reporte FinalDocument71 pagesReporte Finaldemian7pcNo ratings yet
- Proyecto de Un Sistema ExpertoDocument12 pagesProyecto de Un Sistema ExpertoDiegoCastañedaNo ratings yet
- Metodología en Proyectos MecatrónicosDocument4 pagesMetodología en Proyectos MecatrónicosDuvan Mauricio Osorio GutiérrezNo ratings yet
- Modulo Control Un Grado de LibertadDocument11 pagesModulo Control Un Grado de LibertadRicardo Salamanca EspejoNo ratings yet
- Tesis DronDocument16 pagesTesis DronyvanNo ratings yet
- Sistema de Gestion de Pavimentos Basado en Nuevas Tecnologias para Paises en Via de DesarrolloDocument15 pagesSistema de Gestion de Pavimentos Basado en Nuevas Tecnologias para Paises en Via de DesarrolloDeyglin Miguel González AguirreNo ratings yet
- Servomecanismos (M)Document4 pagesServomecanismos (M)PROF. VICTOR GERARDO GAITAN GARCIA100% (1)
- Los Proyectos MecatronicosDocument12 pagesLos Proyectos MecatronicosAnibal PeralesNo ratings yet
- Manual de Prácticas DDVHDLDocument34 pagesManual de Prácticas DDVHDLJosué RamírezNo ratings yet
- 29-Diseño y Construcción de Un Tablero Didáctico de Neumática para La Capacitación en Automatización PDFDocument6 pages29-Diseño y Construcción de Un Tablero Didáctico de Neumática para La Capacitación en Automatización PDForlando moraNo ratings yet
- May Quijano Lopez 2016Document23 pagesMay Quijano Lopez 2016Moroko69No ratings yet
- AscensorDocument68 pagesAscensorgislagos100% (1)
- Manual Velocidad InternetDocument5 pagesManual Velocidad InternetJimm CarrNo ratings yet
- VITALIA150Document44 pagesVITALIA150LaloPiano100% (2)
- VITALIA125Document44 pagesVITALIA125galessNo ratings yet
- TESIS - MONTACARGAS AUTOMATICOllamasDocument140 pagesTESIS - MONTACARGAS AUTOMATICOllamasChucho KeopsNo ratings yet
- Administracion Del MantenimientoDocument46 pagesAdministracion Del Mantenimientomeenturcaestamierda100% (1)
- TESIS - MONTACARGAS AUTOMATICOllamasDocument140 pagesTESIS - MONTACARGAS AUTOMATICOllamasChucho KeopsNo ratings yet
- Capitulo 201 20semana 20del 205 20al 2021 20de 20febrero 130710234426 Phpapp02Document50 pagesCapitulo 201 20semana 20del 205 20al 2021 20de 20febrero 130710234426 Phpapp02Ed Abraham Reeyess0% (1)
- Douglas ProductosGenerales BANDA TRASPORTADORADocument12 pagesDouglas ProductosGenerales BANDA TRASPORTADORAEd Abraham ReeyessNo ratings yet
- Guia Modem Ont HuaweiHG8245HDocument18 pagesGuia Modem Ont HuaweiHG8245HJake T.No ratings yet
- Inspeccion ExtintoresDocument1 pageInspeccion ExtintoresEd Abraham ReeyessNo ratings yet
- Mantenimiento de Montacargas PDFDocument28 pagesMantenimiento de Montacargas PDFBlank CE91% (22)
- 128 PDFDocument134 pages128 PDFAndrea Castro VirgenNo ratings yet
- Checklist MontacargasDocument1 pageChecklist MontacargasEd Abraham ReeyessNo ratings yet
- PoliesterDocument22 pagesPoliesterGiannina Paredes AguilarNo ratings yet
- Extral ArquitectonicoDocument91 pagesExtral ArquitectonicoAmin Ho WanaNo ratings yet
- Guia Modem Ont HuaweiHG8245HDocument18 pagesGuia Modem Ont HuaweiHG8245HJake T.No ratings yet
- Manual Velocidad InternetDocument5 pagesManual Velocidad InternetJimm CarrNo ratings yet
- Douglas ProductosGenerales BANDA TRASPORTADORADocument12 pagesDouglas ProductosGenerales BANDA TRASPORTADORAEd Abraham ReeyessNo ratings yet
- Douglas ProductosGenerales BANDA TRASPORTADORADocument12 pagesDouglas ProductosGenerales BANDA TRASPORTADORAEd Abraham ReeyessNo ratings yet
- Investigación Del Comportamiento de La Chumacera CortaDocument185 pagesInvestigación Del Comportamiento de La Chumacera CortalucNo ratings yet
- Biofisica Optica, Efecto DopplerDocument21 pagesBiofisica Optica, Efecto DopplerAntony HSNo ratings yet
- Resumen Completo BachilleratoDocument279 pagesResumen Completo BachilleratoVale PMNo ratings yet
- Línea Del TiempoDocument3 pagesLínea Del TiempoNeirovis TejadaNo ratings yet
- PRÁCTICA No 1Document3 pagesPRÁCTICA No 1Edwin Alex Ovando SaavedraNo ratings yet
- POLIMEROS14 UNIDAD 5 Elastomeros y Eslaticidad de Las GomasDocument32 pagesPOLIMEROS14 UNIDAD 5 Elastomeros y Eslaticidad de Las GomasDarío RiosaNo ratings yet
- SisautevaDocument8 pagesSisautevaJota E CeballosNo ratings yet
- CP 17 Difracción en Una y en N Ranuras. 4 PáginasDocument5 pagesCP 17 Difracción en Una y en N Ranuras. 4 PáginasXavier Benitez RodriguezNo ratings yet
- Trabajo D Planos y EjesDocument9 pagesTrabajo D Planos y EjesnestorchangNo ratings yet
- Cómo Interpretar Los Códigos de Los TransistoresDocument4 pagesCómo Interpretar Los Códigos de Los TransistorescarlosNo ratings yet
- TP 10 - Problemas Integrados - Clase 04-11-2021Document12 pagesTP 10 - Problemas Integrados - Clase 04-11-2021Rocio ArigosNo ratings yet
- Memoria Descriptiva - Partidas EjecutadasDocument21 pagesMemoria Descriptiva - Partidas EjecutadasCarlos Miguel Pariona FloresNo ratings yet
- Solemne 1 Fisiología HumanaDocument42 pagesSolemne 1 Fisiología HumanaPili biebs100% (1)
- Protocolo Limpieza Mejillon - Nov2019para WebDocument16 pagesProtocolo Limpieza Mejillon - Nov2019para WebALEJANDRO GOMEZ MARTINEZNo ratings yet
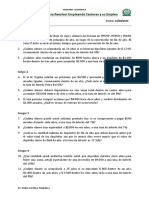
- TAREA02: para Resolver Empleando Factores y Su Empleo: VIII Ciclo "A" Fecha: 24/08/2020 Grupo 1Document3 pagesTAREA02: para Resolver Empleando Factores y Su Empleo: VIII Ciclo "A" Fecha: 24/08/2020 Grupo 1WALDO ADRIAN MAGALLANES PACHASNo ratings yet
- Partes de La MecanicaDocument2 pagesPartes de La MecanicaJEAN ALEXANDER AYOVI ANDRADENo ratings yet
- Evidencia 3Document9 pagesEvidencia 3Freddy PerezNo ratings yet
- Folleto Lofis + Econ.Document39 pagesFolleto Lofis + Econ.Roy Perez-AcuñaNo ratings yet
- Taller Accionamiento Eléctrico X11Document17 pagesTaller Accionamiento Eléctrico X11alizethssaNo ratings yet
- Practica 2 DigitalDocument1 pagePractica 2 Digitalhartos1988No ratings yet
- Sistemas Egr y SCR en Motor Scania DieselDocument25 pagesSistemas Egr y SCR en Motor Scania DieselJob Esp100% (1)
- Castillo Loayza, EdelvioDocument31 pagesCastillo Loayza, EdelvioEdil HuayanayNo ratings yet
- Carbonato de CalcioDocument27 pagesCarbonato de CalcioEsteban Garcia100% (1)
- Formula Rio MRU y MUADocument1 pageFormula Rio MRU y MUAOlivera SebastianNo ratings yet
- Tesis Jairo WilliansDocument111 pagesTesis Jairo WilliansLuisJoseAmundarayNo ratings yet
- Razones para Actuar. Una Teoria - John R. SearleDocument503 pagesRazones para Actuar. Una Teoria - John R. SearleFabio Morandin0% (1)
- Estadistica FinalDocument16 pagesEstadistica FinalManuel MozoNo ratings yet
- EstabilidadtaludDocument85 pagesEstabilidadtaludRiickardo SkateNo ratings yet
- Mefi MefiDocument12 pagesMefi MefiMarvin SilvaNo ratings yet
- 02 Boletín de Precios Agropecuarios Mensual Febrero 2020Document47 pages02 Boletín de Precios Agropecuarios Mensual Febrero 2020Balerin GálvezNo ratings yet
- Análisis Del Libro CIENCIAS NATURALES 8 de La Editorial ESTRADADocument8 pagesAnálisis Del Libro CIENCIAS NATURALES 8 de La Editorial ESTRADALucas Larena100% (1)