You might also like
- PyGMTSAR: Sentinel-1 Python InSAR. An Introduction: Python InSAR, #1From EverandPyGMTSAR: Sentinel-1 Python InSAR. An Introduction: Python InSAR, #1No ratings yet
- Remote Sensing Platforms and SensorsDocument29 pagesRemote Sensing Platforms and SensorsANSHU KUMARINo ratings yet
- Remote Sensing Platforms and SensorsDocument28 pagesRemote Sensing Platforms and SensorsANSHU KUMARINo ratings yet
- Topic: Remote Sensing Platforms: Dr. Md. NazimDocument17 pagesTopic: Remote Sensing Platforms: Dr. Md. NazimShubham sinhaNo ratings yet
- Field Astronomy and GISDocument12 pagesField Astronomy and GISKapil ShresthaNo ratings yet
- Text AerialPhotographyandPhotogrammetryDocument33 pagesText AerialPhotographyandPhotogrammetryMadhusudan TiwariNo ratings yet
- Notes 3Document82 pagesNotes 3sarvo singhNo ratings yet
- 449 - Basic Concepts of Remote SensingDocument22 pages449 - Basic Concepts of Remote SensingPrakash Kumar SahooNo ratings yet
- Radar Guided Missile SystemDocument3 pagesRadar Guided Missile SystemVS JayarajNo ratings yet
- Text AerialPhotographyandPhotogrammetry PDFDocument33 pagesText AerialPhotographyandPhotogrammetry PDFPeter KiogothiNo ratings yet
- Sensors: Spherical Robots For Special Purposes: A Review On Current PossibilitiesDocument36 pagesSensors: Spherical Robots For Special Purposes: A Review On Current PossibilitiesAlvaro Martin Reyes CordovaNo ratings yet
- Aerial Photographyand Photogrammetry 245Document33 pagesAerial Photographyand Photogrammetry 245seyoum shimelsNo ratings yet
- Text AerialPhotographyandPhotogrammetryDocument33 pagesText AerialPhotographyandPhotogrammetryreta birhanuNo ratings yet
- Aerial Photography ManualDocument33 pagesAerial Photography ManualElvor eskanNo ratings yet
- My ReportDocument67 pagesMy ReportVaibhav Gupta100% (1)
- Introduction To Microwave Remote SensingDocument5 pagesIntroduction To Microwave Remote SensingVincent KiptanuiNo ratings yet
- Remote Sensing PlatformsDocument9 pagesRemote Sensing PlatformsMopidevi Vijaya KishoreNo ratings yet
- Lonkham Boruah - Geography - VI Sem (Major) - Basic Concepts in Remote SensingDocument5 pagesLonkham Boruah - Geography - VI Sem (Major) - Basic Concepts in Remote SensingAlvaro Vegas HidalgoNo ratings yet
- Remote SensingDocument9 pagesRemote SensingSara ZamzamNo ratings yet
- Remote Sensing of Vegetation From UAV Platforms UsDocument7 pagesRemote Sensing of Vegetation From UAV Platforms UsjuanjoNo ratings yet
- Technical Seminar 1Document16 pagesTechnical Seminar 1EC19 702 SRI VARSHA CNo ratings yet
- Remote Sensing Imagery Sensors and Image Interpretation-IJRASETDocument4 pagesRemote Sensing Imagery Sensors and Image Interpretation-IJRASETIJRASETPublicationsNo ratings yet
- Remote Sensing - IntroductionDocument6 pagesRemote Sensing - IntroductionRandolph EscartinNo ratings yet
- TS01F Phan Thi Takahashi 9871Document13 pagesTS01F Phan Thi Takahashi 9871Mihai Madalin SuicaNo ratings yet
- Remote SencingDocument6 pagesRemote Sencingsathish kumarNo ratings yet
- The Use of Unmanned Aerial Vehicles (UAVs) For EngineeringDocument45 pagesThe Use of Unmanned Aerial Vehicles (UAVs) For EngineeringNur khairul DanielNo ratings yet
- Classification and Purpose of Surveying Instruments Used by Geodetic Engineers in The PhilippinesDocument38 pagesClassification and Purpose of Surveying Instruments Used by Geodetic Engineers in The PhilippinesBin-najir DilangalenNo ratings yet
- Direct Georeferencing of Ultrahigh-Resolution UAV Imagery: IEEE Transactions On Geoscience and Remote Sensing July 2013Document9 pagesDirect Georeferencing of Ultrahigh-Resolution UAV Imagery: IEEE Transactions On Geoscience and Remote Sensing July 2013Sudung SitumorangNo ratings yet
- Chapter 5 Section 3Document7 pagesChapter 5 Section 3Anem PoojaNo ratings yet
- The Evolution of Lidar and Its Application in High Precision MeasurementDocument12 pagesThe Evolution of Lidar and Its Application in High Precision MeasurementBadalNo ratings yet
- Remote Sensing-IntroDocument112 pagesRemote Sensing-Introlakkepogu satish kumarNo ratings yet
- Drone y Tecnicas de AradoDocument4 pagesDrone y Tecnicas de AradoalfonsoNo ratings yet
- GIS Past Paper ExamsDocument11 pagesGIS Past Paper ExamsShoturu100% (4)
- Advances in Enviromental Remote Sensing - Qihao Weng-1-264-290-1-2Document2 pagesAdvances in Enviromental Remote Sensing - Qihao Weng-1-264-290-1-2Tissa ZsaaNo ratings yet
- 1517203853LIDARbasicprincipleandapplications (1Document20 pages1517203853LIDARbasicprincipleandapplications (1sg.gis279No ratings yet
- Ge321 Lec2.2Document5 pagesGe321 Lec2.2Hazel Jane Vega UyNo ratings yet
- ASSIGNMENTTTDocument1 pageASSIGNMENTTTjmensah67No ratings yet
- International Encyclopedia of Geography - 2023 - Sharma - LiDARDocument12 pagesInternational Encyclopedia of Geography - 2023 - Sharma - LiDARrajashree naikNo ratings yet
- PP Microwave Remote Sensing of LandDocument33 pagesPP Microwave Remote Sensing of LandNarek StepanyanNo ratings yet
- GPR BaseDocument50 pagesGPR Basenimitjain03071991No ratings yet
- LidarDocument21 pagesLidarKunal DeshmukhNo ratings yet
- Long Range Object Tracking Using Infrared and Ultrasound Optical SensorsDocument12 pagesLong Range Object Tracking Using Infrared and Ultrasound Optical SensorsBhabani sankar KishanNo ratings yet
- A Review: Remote Sensing SensorsDocument24 pagesA Review: Remote Sensing SensorsvirajainNo ratings yet
- Module 4 CompleteDocument18 pagesModule 4 CompletefhszjgvNo ratings yet
- Remote SensingDocument21 pagesRemote SensingMathan KumarNo ratings yet
- 5 - Unmanned Aerial Vehicles For High-Resolution Environmental Monitoring - A Review of Applications and Future Directions - Rev3.0Document7 pages5 - Unmanned Aerial Vehicles For High-Resolution Environmental Monitoring - A Review of Applications and Future Directions - Rev3.0Dr Agus BudiyonoNo ratings yet
- Remote Sensing: Survey of Hyperspectral Earth Observation Applications From Space in The Sentinel-2 ContextDocument32 pagesRemote Sensing: Survey of Hyperspectral Earth Observation Applications From Space in The Sentinel-2 ContextJean-Michel RendersNo ratings yet
- Automated Detection, Locking and Hitting A Fast Moving Aerial Object by Image Processing (Suitable For Guided Missile)Document10 pagesAutomated Detection, Locking and Hitting A Fast Moving Aerial Object by Image Processing (Suitable For Guided Missile)mahmoudNo ratings yet
- An Overview of Remote SensingDocument3 pagesAn Overview of Remote SensingCEO DimejiNo ratings yet
- Kulkarni 2019Document6 pagesKulkarni 2019sathish sathish h gNo ratings yet
- Aerial Robot Swarms: A ReviewDocument9 pagesAerial Robot Swarms: A ReviewIAES International Journal of Robotics and AutomationNo ratings yet
- Gis Flood MGMTDocument12 pagesGis Flood MGMTPooja100% (1)
- LiDAR Mapping A Remote Sensing TechnologyDocument3 pagesLiDAR Mapping A Remote Sensing Technologyvishwas sNo ratings yet
- Synopsis For Mini Project DraftDocument7 pagesSynopsis For Mini Project DraftGiri GowdaNo ratings yet
- 3-D Indoor Navigation and Autonomous Flight of A M PDFDocument7 pages3-D Indoor Navigation and Autonomous Flight of A M PDFkhoamaiNo ratings yet
- Isprsarchives XXXVIII 1 C22 107 2011Document6 pagesIsprsarchives XXXVIII 1 C22 107 2011Abhay GuptaNo ratings yet
- 4 - GIS Data Collection - EngDocument11 pages4 - GIS Data Collection - EngAhmed HassanNo ratings yet
- Landmines Detection Using UAVDocument4 pagesLandmines Detection Using UAVAnonymous zKvy2YnL9INo ratings yet
- Satellite Orbits and PlatformsDocument24 pagesSatellite Orbits and PlatformsBiniam TezeraNo ratings yet
- Survey On Classification Techniques Used in Remote Sensing For Satellite ImagesDocument4 pagesSurvey On Classification Techniques Used in Remote Sensing For Satellite Imagesrock starNo ratings yet
- SolutionsDocument8 pagesSolutionsJavid BalakishiyevNo ratings yet
- BioTime 8.5 User ManualDocument144 pagesBioTime 8.5 User ManualKashif Adeel50% (2)
- Deductive ReasoningDocument2 pagesDeductive ReasoningMariel C. BombitaNo ratings yet
- MCAT Uhs Past Paper (2008-2016)Document180 pagesMCAT Uhs Past Paper (2008-2016)Abdullah SheikhNo ratings yet
- 3 Chemistry of Milk Constituents PDFDocument26 pages3 Chemistry of Milk Constituents PDFFrancisco Rodriguez VazquezNo ratings yet
- Minihydro GANZ enDocument5 pagesMinihydro GANZ enRade NovakovicNo ratings yet
- Question For Practice Oracle (11g) With AnswersDocument32 pagesQuestion For Practice Oracle (11g) With AnswersAnonymous J8V2pZZ100% (4)
- MMW (Data Management) - Part 2Document43 pagesMMW (Data Management) - Part 2arabellah shainnah rosalesNo ratings yet
- 50 Input Output Practice Questions 1606810110009 OBDocument17 pages50 Input Output Practice Questions 1606810110009 OBJavid QuadirNo ratings yet
- Fiat Barchetta: EngineDocument20 pagesFiat Barchetta: EngineHallex OliveiraNo ratings yet
- API-650 Design Procedure ExampleDocument21 pagesAPI-650 Design Procedure Examplegdwvcd93% (14)
- MTU-JB RadiatorsDocument11 pagesMTU-JB Radiatorsnanthu7090No ratings yet
- 3questions Measurements and UncertaintyDocument2 pages3questions Measurements and UncertaintyLeanne DerigeNo ratings yet
- Science 3 PDFDocument12 pagesScience 3 PDFJelyn CandoNo ratings yet
- Unit-III - EEFA - CostsDocument70 pagesUnit-III - EEFA - CostsRamalingam ChandrasekharanNo ratings yet
- Full Test Bank For Understanding Pathophysiology 6Th Edition by Huether PDF Docx Full Chapter ChapterDocument36 pagesFull Test Bank For Understanding Pathophysiology 6Th Edition by Huether PDF Docx Full Chapter Chapterexequycheluract6oi100% (9)
- P103154 - 7.00 - Doc - Manual - 8000 WindlassDocument43 pagesP103154 - 7.00 - Doc - Manual - 8000 WindlassDanNo ratings yet
- Periodic Table of ElementsDocument60 pagesPeriodic Table of ElementsruchitlpatelNo ratings yet
- Access Workshop 01Document8 pagesAccess Workshop 01movogonNo ratings yet
- DPP 01 Periodic Table JH Sir-3576 PDFDocument5 pagesDPP 01 Periodic Table JH Sir-3576 PDFChessNo ratings yet
- The Whys and Wherefores of Microphone Array Crosstalk in Multichannel Microphone Array DesignDocument6 pagesThe Whys and Wherefores of Microphone Array Crosstalk in Multichannel Microphone Array DesignmewarulesNo ratings yet
- LAB 7 - Getting Started With Google BigQueryDocument10 pagesLAB 7 - Getting Started With Google BigQueryRama VNo ratings yet
- Welding of Thermoplastics Heated Tool Butt Welding Directive DVS 2207-25Document7 pagesWelding of Thermoplastics Heated Tool Butt Welding Directive DVS 2207-25Yuriy Nechaevskiy100% (1)
- S ParametersDocument29 pagesS ParameterseloiseNo ratings yet
- GENERAL PHYSICS 2 - Q3 - Week 2Document22 pagesGENERAL PHYSICS 2 - Q3 - Week 2vrejie46No ratings yet
- Ethernet Managed Phoenix Contact 2702331 enDocument25 pagesEthernet Managed Phoenix Contact 2702331 enshankar kumarNo ratings yet
- Ec2203-Unit IV Memory Devices Digital ElectronicsDocument38 pagesEc2203-Unit IV Memory Devices Digital ElectronicsKarthikeyan_Go_952567% (6)
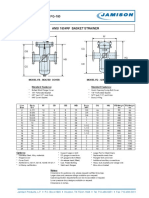
- FB-150 FQ-150 Basket StrainerDocument1 pageFB-150 FQ-150 Basket Strainerklich77No ratings yet
- Microsoft OfficeDocument1 pageMicrosoft OfficesavinaumarNo ratings yet
- 111Document10 pages111Phước Ng50% (2)
- The Ancestor's Tale: A Pilgrimage to the Dawn of EvolutionFrom EverandThe Ancestor's Tale: A Pilgrimage to the Dawn of EvolutionRating: 4 out of 5 stars4/5 (812)
- Alex & Me: How a Scientist and a Parrot Discovered a Hidden World of Animal Intelligence—and Formed a Deep Bond in the ProcessFrom EverandAlex & Me: How a Scientist and a Parrot Discovered a Hidden World of Animal Intelligence—and Formed a Deep Bond in the ProcessNo ratings yet
- Dark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseFrom EverandDark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseRating: 3.5 out of 5 stars3.5/5 (69)
- The Rise and Fall of the Dinosaurs: A New History of a Lost WorldFrom EverandThe Rise and Fall of the Dinosaurs: A New History of a Lost WorldRating: 4 out of 5 stars4/5 (597)
- World of Wonders: In Praise of Fireflies, Whale Sharks, and Other AstonishmentsFrom EverandWorld of Wonders: In Praise of Fireflies, Whale Sharks, and Other AstonishmentsRating: 4 out of 5 stars4/5 (223)
- The Other End of the Leash: Why We Do What We Do Around DogsFrom EverandThe Other End of the Leash: Why We Do What We Do Around DogsRating: 5 out of 5 stars5/5 (65)
- When You Find Out the World Is Against You: And Other Funny Memories About Awful MomentsFrom EverandWhen You Find Out the World Is Against You: And Other Funny Memories About Awful MomentsRating: 3.5 out of 5 stars3.5/5 (13)
- The Hidden Life of Trees: What They Feel, How They CommunicateFrom EverandThe Hidden Life of Trees: What They Feel, How They CommunicateRating: 4 out of 5 stars4/5 (1003)
- Fire Season: Field Notes from a Wilderness LookoutFrom EverandFire Season: Field Notes from a Wilderness LookoutRating: 4 out of 5 stars4/5 (142)
- The Revolutionary Genius of Plants: A New Understanding of Plant Intelligence and BehaviorFrom EverandThe Revolutionary Genius of Plants: A New Understanding of Plant Intelligence and BehaviorRating: 4.5 out of 5 stars4.5/5 (138)
- The Soul of an Octopus: A Surprising Exploration into the Wonder of ConsciousnessFrom EverandThe Soul of an Octopus: A Surprising Exploration into the Wonder of ConsciousnessRating: 4.5 out of 5 stars4.5/5 (254)
- Remnants of Ancient Life: The New Science of Old FossilsFrom EverandRemnants of Ancient Life: The New Science of Old FossilsRating: 3 out of 5 stars3/5 (3)
- The Lives of Bees: The Untold Story of the Honey Bee in the WildFrom EverandThe Lives of Bees: The Untold Story of the Honey Bee in the WildRating: 4.5 out of 5 stars4.5/5 (44)
- Spoiled Rotten America: Outrages of Everyday LifeFrom EverandSpoiled Rotten America: Outrages of Everyday LifeRating: 3 out of 5 stars3/5 (19)
- Ernst Haeckel's Art Forms in Nature: A Visual Masterpiece of the Natural WorldFrom EverandErnst Haeckel's Art Forms in Nature: A Visual Masterpiece of the Natural WorldNo ratings yet
- Darwin's Doubt: The Explosive Origin of Animal Life and the Case for Intelligent DesignFrom EverandDarwin's Doubt: The Explosive Origin of Animal Life and the Case for Intelligent DesignRating: 4 out of 5 stars4/5 (19)
- Come Back, Como: Winning the Heart of a Reluctant DogFrom EverandCome Back, Como: Winning the Heart of a Reluctant DogRating: 3.5 out of 5 stars3.5/5 (10)
- Roxane Gay & Everand Originals: My Year of Psychedelics: Lessons on Better LivingFrom EverandRoxane Gay & Everand Originals: My Year of Psychedelics: Lessons on Better LivingRating: 3.5 out of 5 stars3.5/5 (35)
- The Pleistocene Era: The History of the Ice Age and the Dawn of Modern HumansFrom EverandThe Pleistocene Era: The History of the Ice Age and the Dawn of Modern HumansRating: 4 out of 5 stars4/5 (5)
- Wayfinding: The Science and Mystery of How Humans Navigate the WorldFrom EverandWayfinding: The Science and Mystery of How Humans Navigate the WorldRating: 4.5 out of 5 stars4.5/5 (18)
- Why Fish Don't Exist: A Story of Loss, Love, and the Hidden Order of LifeFrom EverandWhy Fish Don't Exist: A Story of Loss, Love, and the Hidden Order of LifeRating: 4.5 out of 5 stars4.5/5 (699)