You might also like
- AC Electric Motors Control: Advanced Design Techniques and ApplicationsFrom EverandAC Electric Motors Control: Advanced Design Techniques and ApplicationsFouad GiriNo ratings yet
- Motor Fundamentals: 1. Stepper MotorsDocument2 pagesMotor Fundamentals: 1. Stepper MotorsGiang TepNo ratings yet
- Stepper Motors VsServo MotorsDocument2 pagesStepper Motors VsServo MotorsEhab MohamedNo ratings yet
- Servo MotorDocument15 pagesServo MotorShivshankar GhugeNo ratings yet
- View PDFDocument6 pagesView PDFpradeep.esg8068No ratings yet
- An Extensive Look On Servo and Stepper MotorDocument12 pagesAn Extensive Look On Servo and Stepper MotorsajhfhfsjaNo ratings yet
- 5.differences Between Servo Motor and Stepper MotorDocument1 page5.differences Between Servo Motor and Stepper MotorSaurabh SahaNo ratings yet
- Joystick Control of Stepper Motor Using ArduinoDocument7 pagesJoystick Control of Stepper Motor Using ArduinoDany Mathew100% (2)
- Servo Motor - Types, Construction, Working, Controlling & ApplicationsDocument7 pagesServo Motor - Types, Construction, Working, Controlling & ApplicationsAHMED YOUSEFNo ratings yet
- Differences Between Stepper Motors and Servo MotorsDocument1 pageDifferences Between Stepper Motors and Servo MotorsazharzebNo ratings yet
- System Basics: Delta Precision Motors LTDDocument10 pagesSystem Basics: Delta Precision Motors LTDnycknikkiNo ratings yet
- Stepper MotorDocument18 pagesStepper MotorGanesh Pingle100% (1)
- Motor Passo A Passo InfoDocument37 pagesMotor Passo A Passo InfojpncorreiaNo ratings yet
- Servo MotorDocument4 pagesServo MotorWasil BabarNo ratings yet
- Assignment On Servo Motor: January 2018Document4 pagesAssignment On Servo Motor: January 2018Simagn BekeleNo ratings yet
- Stepper MotorDocument11 pagesStepper MotorhaaenNo ratings yet
- Final PresentationDocument103 pagesFinal PresentationQasir NawazNo ratings yet
- Unit-II: Robot Drive Systems and End EffectorsDocument81 pagesUnit-II: Robot Drive Systems and End EffectorsSatheesh KumarNo ratings yet
- Unit-II Drive SystemDocument84 pagesUnit-II Drive SystemSatheesh KumarNo ratings yet
- Servo MotorDocument31 pagesServo Motoradiamiru25% (4)
- Stepper MotorDocument25 pagesStepper Motorhemamanikumar100% (1)
- What Is Servo Motor Servomotor: Rotary Actuator Linear ActuatorDocument11 pagesWhat Is Servo Motor Servomotor: Rotary Actuator Linear ActuatorThe-kiros HadushNo ratings yet
- Paso A Paso General de La Tecnología de AccionamientoDocument8 pagesPaso A Paso General de La Tecnología de AccionamientoVerónica RosasNo ratings yet
- Kaizen - Motor Selection GuideDocument10 pagesKaizen - Motor Selection GuideKarrar HussainNo ratings yet
- Unit Ii PDFDocument17 pagesUnit Ii PDFManojKumar MNo ratings yet
- Introduction Robot Drive SystemsDocument17 pagesIntroduction Robot Drive SystemsTemesgen100% (2)
- ED1000Document4 pagesED1000Mohamed TahounNo ratings yet
- Mechatronics Lab Assignment: Servo MotorsDocument3 pagesMechatronics Lab Assignment: Servo MotorsNavendu GuptaNo ratings yet
- Kaizen - Motor Selection GuideDocument11 pagesKaizen - Motor Selection GuideAmory Sabri AsmaroNo ratings yet
- What Is A Stepper MotorDocument12 pagesWhat Is A Stepper MotorteddiyfentawNo ratings yet
- Using The Right Motor For Your ProjectDocument3 pagesUsing The Right Motor For Your ProjectKULDEEP THAKURNo ratings yet
- Stepper Motor ReportDocument19 pagesStepper Motor ReportIan Bagunas100% (2)
- DC Servomotors Assignment 02Document5 pagesDC Servomotors Assignment 02Saad BhattiNo ratings yet
- Step Motor Engineer (2002 Catlog)Document13 pagesStep Motor Engineer (2002 Catlog)engineer86No ratings yet
- Q4 Electro Stepper and Servo (Research)Document2 pagesQ4 Electro Stepper and Servo (Research)Kim SalvadorNo ratings yet
- Stepper MotorsDocument17 pagesStepper MotorsJadeNo ratings yet
- Servo-Motor: Batch 7: Mouli R N Nagaaswin N Naveen K Nilesh Ram Praveen K Nirmal Kumar SDocument27 pagesServo-Motor: Batch 7: Mouli R N Nagaaswin N Naveen K Nilesh Ram Praveen K Nirmal Kumar SThameem AbbasNo ratings yet
- Stepper MotorDocument2 pagesStepper MotorAnonymous MAit3mlYmNo ratings yet
- What Is A Stepper Motor?Document2 pagesWhat Is A Stepper Motor?Anonymous MAit3mlYmNo ratings yet
- Ac-Dc-Servomotor-Net NotesDocument9 pagesAc-Dc-Servomotor-Net NotesDINESHKUMAR SNo ratings yet
- Answer For QuestionDocument4 pagesAnswer For QuestionMohd AmerNo ratings yet
- Motors Convert Electric Energy To Mechanical MotionDocument9 pagesMotors Convert Electric Energy To Mechanical MotionwissamhijaziNo ratings yet
- Introduction To Motion Control Technology: EngineeringDocument4 pagesIntroduction To Motion Control Technology: EngineeringKhadija RvNo ratings yet
- Industrial Circuits Application NoteDocument3 pagesIndustrial Circuits Application Notequechild180No ratings yet
- Servo MotorsDocument8 pagesServo MotorsFairos ZakariahNo ratings yet
- A Stepper MotorDocument10 pagesA Stepper MotorMohammed SiddiqueNo ratings yet
- Controlling Stepper/DC/Servo Motors With Arduino/NI DAQ/PMACDocument17 pagesControlling Stepper/DC/Servo Motors With Arduino/NI DAQ/PMACandita ranniNo ratings yet
- Motors: Ratings and SpecificationsDocument8 pagesMotors: Ratings and SpecificationsSoumen BanerjeeNo ratings yet
- VFD PDFDocument16 pagesVFD PDFMatthieuNo ratings yet
- Stepper (Rajvardhan Jaideva)Document13 pagesStepper (Rajvardhan Jaideva)Rajvardhan JaidevaNo ratings yet
- How Do Servo Motors Work: This Little Motor Is High in Efficiency and PowerDocument8 pagesHow Do Servo Motors Work: This Little Motor Is High in Efficiency and PowerSubham GhoshNo ratings yet
- ArunDocument11 pagesArunArun ANo ratings yet
- Stepper Motor KTDocument18 pagesStepper Motor KTSankula Siva SankarNo ratings yet
- Image Processing of Sidescan SonarDocument7 pagesImage Processing of Sidescan SonarAlex NicksonNo ratings yet
- DifferenceDocument3 pagesDifferencemoh300No ratings yet
- Servo MotorDocument11 pagesServo MotorBotlhe SomolekaeNo ratings yet
- DC and AC Motor ControlDocument6 pagesDC and AC Motor Controldes tosNo ratings yet
- Stepper Motor & Servo Motor: S.RavisubramanianDocument78 pagesStepper Motor & Servo Motor: S.RavisubramanianRajesh Vella100% (3)
- Servomotor: Servo MotorDocument4 pagesServomotor: Servo MotorAngel AventedorNo ratings yet
- Simio Installation NotesDocument3 pagesSimio Installation NotesAlberto PabloNo ratings yet
- Bend Allowance Equation Engineering CalculatorsDocument1 pageBend Allowance Equation Engineering Calculatorsmvcky2008No ratings yet
- Sheet Metal Design in SolidworksDocument27 pagesSheet Metal Design in SolidworkstnchsgNo ratings yet
- Catia Sheet Metal Design PDFDocument90 pagesCatia Sheet Metal Design PDFNasos MasourasNo ratings yet
- LinksDocument1 pageLinksmvcky2008No ratings yet
- Laplace Table PDFDocument2 pagesLaplace Table PDFmvcky2008No ratings yet
- KXIP N RCB Score BoardDocument19 pagesKXIP N RCB Score Boardmvcky2008No ratings yet
- Kolkata Vs HyderabadDocument12 pagesKolkata Vs Hyderabadmvcky2008No ratings yet
- SRH ScoreboardDocument12 pagesSRH Scoreboardmvcky2008No ratings yet
- SRH ScoreboardDocument12 pagesSRH Scoreboardmvcky2008No ratings yet
- Bircosir - NW 150: Stability and DiversityDocument5 pagesBircosir - NW 150: Stability and Diversityjagath2005ukNo ratings yet
- 59 Why Nuts and Bolts Come Loose V1Document2 pages59 Why Nuts and Bolts Come Loose V1jillianixNo ratings yet
- Some Info On IEEE 841 MotorsDocument9 pagesSome Info On IEEE 841 Motorsb89502164No ratings yet
- Miscellaneous - 4DJNF76KE TSK C00Document3 pagesMiscellaneous - 4DJNF76KE TSK C00Anthony Castro100% (1)
- Flow Divertor Ball Valve DN20 - DN32 - DN50: DescriptionDocument3 pagesFlow Divertor Ball Valve DN20 - DN32 - DN50: Description윤병택No ratings yet
- Cyclones ExerciseDocument4 pagesCyclones ExerciseValeria cNo ratings yet
- Spare Parts Catalogue: AXLE 138670 REF: 138670Document10 pagesSpare Parts Catalogue: AXLE 138670 REF: 138670avant comercialNo ratings yet
- 2002 KX250 Race TuningDocument4 pages2002 KX250 Race TuningKidKawie100% (1)
- PET 332 E Production Engineering & Surface FacilitiesDocument13 pagesPET 332 E Production Engineering & Surface Facilities000No ratings yet
- CFDmodellingofwindflowaroundbuildingsforwindenergyconversion Page10 EECB 12Document11 pagesCFDmodellingofwindflowaroundbuildingsforwindenergyconversion Page10 EECB 12puthenkulamNo ratings yet
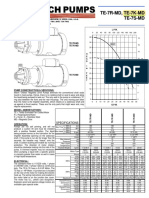
- Manual March Te-7k-MdDocument2 pagesManual March Te-7k-MdjoseNo ratings yet
- Physics FormulasDocument4 pagesPhysics FormulasMica :pNo ratings yet
- Irjet - Speed Breaker Power Generation PDFDocument7 pagesIrjet - Speed Breaker Power Generation PDFJohn Jeren DawinanNo ratings yet
- Sinamics Perfect Harmony enDocument16 pagesSinamics Perfect Harmony ensykimk8921No ratings yet
- Ngineering ATA: Topics in AcousticsDocument4 pagesNgineering ATA: Topics in AcousticsMohamed TahounNo ratings yet
- MCL 311 Lab 4 PDFDocument29 pagesMCL 311 Lab 4 PDFAditya SheoranNo ratings yet
- Inplant Training Presentation Aniket Shinde 151Document17 pagesInplant Training Presentation Aniket Shinde 151ajayNo ratings yet
- InvDocument4 pagesInvJobJobNo ratings yet
- MEE322 Final Exam S20Document5 pagesMEE322 Final Exam S20Nabil SweidanNo ratings yet
- TIEIG 2023 - Twin Washers & Disc SpringsDocument24 pagesTIEIG 2023 - Twin Washers & Disc SpringsHülya Kula ÇİÇEKÇİNo ratings yet
- BPW Service Instructions - KLD 08 2010 ECOPLUS IIDocument95 pagesBPW Service Instructions - KLD 08 2010 ECOPLUS IIpricopdaniel100% (1)
- (Logistics Team) PDO Oilfield Transport & Interior Based Vehicle SpecificationsDocument22 pages(Logistics Team) PDO Oilfield Transport & Interior Based Vehicle SpecificationsVenkatesha HebbarNo ratings yet
- 9792 PHYSICS: MARK SCHEME For The May/June 2010 Question Paper For The Guidance of TeachersDocument14 pages9792 PHYSICS: MARK SCHEME For The May/June 2010 Question Paper For The Guidance of TeachersbobNo ratings yet
- 1 - Firewater Piping Spec - DIDocument2 pages1 - Firewater Piping Spec - DISuezie Iella100% (1)
- Modelling and SimulationDocument16 pagesModelling and SimulationWajdi SadikNo ratings yet
- Me401A Lab Report: Experiment Number: 5 Group Number: B2Document9 pagesMe401A Lab Report: Experiment Number: 5 Group Number: B2Rishu KatiyarNo ratings yet
- A Brief Review of Recent Results in Vortex Induced VibrationsDocument23 pagesA Brief Review of Recent Results in Vortex Induced VibrationsAkshay DeshpandeNo ratings yet
- Continuous Beam PDFDocument12 pagesContinuous Beam PDFRupakDasNo ratings yet
- Reinforced Concrete Design of A 5 Storey Seminary Main BuildingDocument117 pagesReinforced Concrete Design of A 5 Storey Seminary Main Buildingjedsclement100% (1)
- Mvjce Me 6 SemDocument101 pagesMvjce Me 6 SemAkash AkuNo ratings yet