You might also like
- Electrical and Electronic Principles 3 Checkbook: The Checkbook SeriesFrom EverandElectrical and Electronic Principles 3 Checkbook: The Checkbook SeriesNo ratings yet
- Implementation of Space Vector Pulse Width Modulation Technique On Three Phase Two Level InverterDocument11 pagesImplementation of Space Vector Pulse Width Modulation Technique On Three Phase Two Level InverterАлексей ЯмаNo ratings yet
- Harmonic DistortionsDocument23 pagesHarmonic Distortionssandeep kumar mishraNo ratings yet
- Uow - Power Electronics 3 - 2020Document14 pagesUow - Power Electronics 3 - 2020FUCKYOUNo ratings yet
- Space Vector PWM and TransformationDocument47 pagesSpace Vector PWM and TransformationB LAKSHMI PRIYA 180992No ratings yet
- Experiment - 2 Synchro Transmitter ReceiverDocument10 pagesExperiment - 2 Synchro Transmitter Receivershivamsinghunique1No ratings yet
- SpaceVector PWM InverteDocument27 pagesSpaceVector PWM InverteShoaib KhizerNo ratings yet
- SpaceVector PWM InverterDocument35 pagesSpaceVector PWM Invertersolomong50% (2)
- 2 LVL PDFDocument7 pages2 LVL PDFakun gamingjNo ratings yet
- Chapter 3 - Part 2 - YusDocument25 pagesChapter 3 - Part 2 - YusWeehao SiowNo ratings yet
- 70.1 02 PDFDocument14 pages70.1 02 PDFyounesNo ratings yet
- Space Vector Control of A Three-Phase Rectifier Using PLECSDocument5 pagesSpace Vector Control of A Three-Phase Rectifier Using PLECSNguyễn Đình VănNo ratings yet
- Space-Vector PWM With TMS320C24x/F24x Using Hardware and Software Determined Switching PatternsDocument44 pagesSpace-Vector PWM With TMS320C24x/F24x Using Hardware and Software Determined Switching PatternsMadusanka WeebeddaNo ratings yet
- Dynamic Model of Induction Machine-1Document68 pagesDynamic Model of Induction Machine-1Sanskruti TakalkhedeNo ratings yet
- Example 4 1 Circuits IntroductionDocument4 pagesExample 4 1 Circuits IntroductionDiego Escobar MoncadaNo ratings yet
- Comparative Study of Five Level and SeveDocument12 pagesComparative Study of Five Level and Sevemahmoud yarahmadiNo ratings yet
- A. Lightning Current and ImpedanceDocument15 pagesA. Lightning Current and ImpedanceJosNo ratings yet
- Real Time Implementation of Space Vector Pulse Width Modulation Using Arduino DUE BoardDocument6 pagesReal Time Implementation of Space Vector Pulse Width Modulation Using Arduino DUE BoardDaniel PinedaNo ratings yet
- Sample Questions From EC3032 Power Electronics 2020 Online ExamDocument5 pagesSample Questions From EC3032 Power Electronics 2020 Online Examsadeepa sooriyaarachchiNo ratings yet
- Multilvel Inverter ControlDocument125 pagesMultilvel Inverter ControlVenkata Ramdas BonamNo ratings yet
- Power Angle CharacteristicsDocument6 pagesPower Angle Characteristicsmadhan_22No ratings yet
- للDocument4 pagesللerfan roshandelNo ratings yet
- Unit - Ii Stepping MotorDocument56 pagesUnit - Ii Stepping MotorLaxmikant BagaleNo ratings yet
- Space Vector Modulated Three Phase Voltage Source InverterDocument24 pagesSpace Vector Modulated Three Phase Voltage Source InverterАлексей ЯмаNo ratings yet
- Electrical Machines IIDocument6 pagesElectrical Machines IIsuryaprakash001No ratings yet
- U20ee615 Sem NotesDocument144 pagesU20ee615 Sem NotesarunajithNo ratings yet
- 2007 - Performance Characteristics of The Reduced Common Mode Voltage Near State PWM MethodDocument10 pages2007 - Performance Characteristics of The Reduced Common Mode Voltage Near State PWM MethodNguyễn Nhật TưởngNo ratings yet
- Three Phase DC To Ac InverterDocument44 pagesThree Phase DC To Ac Inverternoor deen100% (1)
- 11 Chapter3Document46 pages11 Chapter3Anonymous wAdxNydjNo ratings yet
- Buku DiodaDocument8 pagesBuku Diodanaru_chan1003No ratings yet
- A Novel Space Vector Modulation (SVM) Controlled Inverter For Adjustable Speed Drive ApplicationsDocument9 pagesA Novel Space Vector Modulation (SVM) Controlled Inverter For Adjustable Speed Drive ApplicationsInternational Journal of Engineering Inventions (IJEI)No ratings yet
- Three Phase InverterrsDocument21 pagesThree Phase InverterrsZack ZoldyckNo ratings yet
- Phasor Diagram Verification - 3 Wire System: Safety PrecautionsDocument7 pagesPhasor Diagram Verification - 3 Wire System: Safety PrecautionsmohyousifNo ratings yet
- Unit IIDocument38 pagesUnit IIMugilNo ratings yet
- B 31290735Document75 pagesB 31290735chibssa alemayehuNo ratings yet
- BLDC Motor Control Using A Variable DC Link SixDocument8 pagesBLDC Motor Control Using A Variable DC Link Sixsashank rawatNo ratings yet
- Multiphase A.C. Emfs (Produced by Multiple Windings)Document6 pagesMultiphase A.C. Emfs (Produced by Multiple Windings)deepak_gupta_pritiNo ratings yet
- Multiphase A.C. Emfs (Produced by Multiple Windings)Document6 pagesMultiphase A.C. Emfs (Produced by Multiple Windings)rakeshee2007No ratings yet
- Multiphase A.C. Emfs (Produced by Multiple Windings)Document6 pagesMultiphase A.C. Emfs (Produced by Multiple Windings)rakeshee2007No ratings yet
- Three Phase Circuits 3Document31 pagesThree Phase Circuits 3mivriNo ratings yet
- Lecture 22 18102022Document14 pagesLecture 22 18102022Nitish PutrevuNo ratings yet
- Space Vector PWMDocument10 pagesSpace Vector PWMMohamed Nabil100% (1)
- Digital Implementation of Space Vector Pulse Width Modulation Technique Using 8-Bit MicrocontrollerDocument8 pagesDigital Implementation of Space Vector Pulse Width Modulation Technique Using 8-Bit MicrocontrollerahmedNo ratings yet
- Space Vector ControlDocument21 pagesSpace Vector ControlPoras KhetarpalNo ratings yet
- ES4E8 Lab2 22 23Document12 pagesES4E8 Lab2 22 23金子泰No ratings yet
- A Review of Negative Sequence CurrentDocument19 pagesA Review of Negative Sequence CurrentovercurrentNo ratings yet
- Three Phase Bridge Inverter Explained - Electrical ConceptsDocument9 pagesThree Phase Bridge Inverter Explained - Electrical ConceptsMohammad HamamdNo ratings yet
- A Comparison of Various DCDC Converters and Their Application ToDocument8 pagesA Comparison of Various DCDC Converters and Their Application ToRajan M SNo ratings yet
- ABC DQ TransformationDocument2 pagesABC DQ TransformationRoop Kapur0% (1)
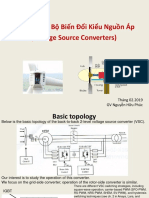
- 07 - VSC - Voltage Source ConverterDocument51 pages07 - VSC - Voltage Source ConverterHùng Võ MạnhNo ratings yet
- Rotary Encoder (Incremental) E6A2: Ordering InformationDocument8 pagesRotary Encoder (Incremental) E6A2: Ordering InformationDariusNo ratings yet
- Digital Measurement of Electrical Quantities Cathode Ray OscilloscopeDocument65 pagesDigital Measurement of Electrical Quantities Cathode Ray OscilloscopekrishnandrkNo ratings yet
- What Is An Inverter?: Classification of InvertersDocument11 pagesWhat Is An Inverter?: Classification of Invertersayash mohantyNo ratings yet
- Matlab/S M F O C PMSM D S V: Imulink Odel of Ield Riented Ontrol of Rive Using Pace EctorsDocument10 pagesMatlab/S M F O C PMSM D S V: Imulink Odel of Ield Riented Ontrol of Rive Using Pace Ectorshusham hushamNo ratings yet
- A Hybrid PWM Strategy Combining Modified Space Vector and Triangle Comparison Methods - Vladimir Blasko PDFDocument7 pagesA Hybrid PWM Strategy Combining Modified Space Vector and Triangle Comparison Methods - Vladimir Blasko PDFStefania OliveiraNo ratings yet
- Space Vector Modulation of A 3-Phase AC Induction Motor With The Z16FMC ZNEO MicrocontrollerDocument28 pagesSpace Vector Modulation of A 3-Phase AC Induction Motor With The Z16FMC ZNEO Microcontrollerturbo385No ratings yet
- Electric - Drive Chap4 Part2Document22 pagesElectric - Drive Chap4 Part2Alazar GetachewNo ratings yet
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- DRA MLSSA Manual 10WI 8Document312 pagesDRA MLSSA Manual 10WI 8Nikos SpaNo ratings yet
- Ab Initio TrainingDocument100 pagesAb Initio TrainingNamrata MukherjeeNo ratings yet
- KNL3353 Control System Engineering LectuDocument14 pagesKNL3353 Control System Engineering Lectuدكتور كونوهاNo ratings yet
- Ata2021 Simulation Study and PID Tune of Automated Guided Vehicles AGVDocument8 pagesAta2021 Simulation Study and PID Tune of Automated Guided Vehicles AGVNguyễn Trung ThôngNo ratings yet
- A Nagoor Kani - SIGNALS AND SYSTEMS-Tata McGraw-Hill (2010) PDFDocument829 pagesA Nagoor Kani - SIGNALS AND SYSTEMS-Tata McGraw-Hill (2010) PDFSumedh Satam93% (14)
- Control System MCQDocument29 pagesControl System MCQAdarsh JhaNo ratings yet
- Libro Control DSPDocument93 pagesLibro Control DSPAlcides Ramos ZambranoNo ratings yet
- HW CH5Document3 pagesHW CH5DODINo ratings yet
- Ec 1304 Control SystemsDocument2 pagesEc 1304 Control SystemsMohamed Abdul RahimNo ratings yet
- Notch Filter DigitalDocument43 pagesNotch Filter Digitalanand248No ratings yet
- Mathematical Modelling and Active Control of OscillatorsDocument10 pagesMathematical Modelling and Active Control of OscillatorsHua Hidari YangNo ratings yet
- ElectricalDocument77 pagesElectricalsayedNo ratings yet
- Even Sem BookDocument18 pagesEven Sem BookshadiqengineerNo ratings yet
- Rohini 30938525698Document20 pagesRohini 30938525698jeffrel taguinesNo ratings yet
- S1.State Variable RepresentationDocument5 pagesS1.State Variable RepresentationrajeshmholmukheNo ratings yet
- Rew v5.01 Beta22 HelpDocument201 pagesRew v5.01 Beta22 HelpAlecsandruNeacsuNo ratings yet
- Control Systems: Gate ClassesDocument29 pagesControl Systems: Gate ClassesRAKESH K 20BEE1177No ratings yet
- A Matlab-Simulink Flickermeter Model For: Power Quality StudiesDocument5 pagesA Matlab-Simulink Flickermeter Model For: Power Quality StudiesGayathri ErandikaNo ratings yet
- EE2253 NotesDocument124 pagesEE2253 NotesSiva Kathikeyan100% (1)
- Assignment For Control SystemDocument7 pagesAssignment For Control SystemAnkit rathoreNo ratings yet
- Gujarat Technological UniversityDocument3 pagesGujarat Technological Universityfeyayel988No ratings yet
- Ghosh, D. P., 1971, Inverse Filter Coefficients For The Computation of Apparent Resistivity Standard Curves For A Horizontally Stratified EarthDocument7 pagesGhosh, D. P., 1971, Inverse Filter Coefficients For The Computation of Apparent Resistivity Standard Curves For A Horizontally Stratified EarthCinthia MtzNo ratings yet
- Cheat Sheet SignalsDocument4 pagesCheat Sheet SignalslordfiendNo ratings yet
- Control-Systems Updated - 03152024 Sy2324Document75 pagesControl-Systems Updated - 03152024 Sy2324dalapojustin123No ratings yet
- BS Lab Manual NewDocument36 pagesBS Lab Manual NewShameer PhyNo ratings yet
- SCS CO2 EndDocument4 pagesSCS CO2 EndsubbiahthotaNo ratings yet
- Feedback Control of Dynamic SystemsDocument33 pagesFeedback Control of Dynamic SystemsPanayiotis PapadopoulosNo ratings yet
- Application of Vehicle Interior Noise SimulationDocument7 pagesApplication of Vehicle Interior Noise Simulationprashanth_1008No ratings yet
- Dynamic Modelling and Control of Some Power Electronic - Lesson-1Document62 pagesDynamic Modelling and Control of Some Power Electronic - Lesson-1Alfred ThamNo ratings yet
- Obtaining Natural Frequency From Spring de EctionDocument6 pagesObtaining Natural Frequency From Spring de EctionPrasanjit MurmuNo ratings yet