You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Advanced Crop Protection Hand-OutsDocument21 pagesAdvanced Crop Protection Hand-OutsDaphne Cuaresma100% (1)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Baker D and DB Retainer Production Packers H43210 PDFDocument7 pagesBaker D and DB Retainer Production Packers H43210 PDFwasayrazaNo ratings yet
- 12 Steps Required For Successful Rice ProductionDocument14 pages12 Steps Required For Successful Rice ProductionIRRI Rice Knowledge Bank81% (21)
- Grade 5 Sses Science CurriculumDocument9 pagesGrade 5 Sses Science CurriculumPhilip YansonNo ratings yet
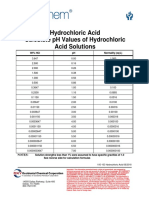
- Hydrochloric Acid Handbook: OxychemDocument47 pagesHydrochloric Acid Handbook: OxychemVikashNo ratings yet
- Dairy Processing CleaningDocument21 pagesDairy Processing Cleaningcortizone31No ratings yet
- Box 1.5m 1.5mDocument22 pagesBox 1.5m 1.5mveevimalNo ratings yet
- Conifer Table of ContentsDocument1,383 pagesConifer Table of ContentsFernandoNo ratings yet
- Q1 Module 2. Prepare Land PreparationDocument38 pagesQ1 Module 2. Prepare Land PreparationMitch Panganiban TogniNo ratings yet
- Oil & Gas Safety Regulation 1974Document82 pagesOil & Gas Safety Regulation 1974Hamza Shehzad100% (3)
- The Global Phosphorus CycleDocument39 pagesThe Global Phosphorus Cyclebrennerin2100% (1)
- Tough economic decisions finally being takenDocument28 pagesTough economic decisions finally being takenwasayrazaNo ratings yet
- Meezan Bank FMR April 2022Document28 pagesMeezan Bank FMR April 2022wasayrazaNo ratings yet
- Meezan Bank FMR July 2022Document27 pagesMeezan Bank FMR July 2022wasayrazaNo ratings yet
- Meezan Bank FMR June 2022Document30 pagesMeezan Bank FMR June 2022wasayrazaNo ratings yet
- PSX Quote 31-08-2022Document42 pagesPSX Quote 31-08-2022wasayrazaNo ratings yet
- Quote 202002novDocument27 pagesQuote 202002novwasayrazaNo ratings yet
- Effect of Chelating Agent On Lithology of Porous MediaDocument15 pagesEffect of Chelating Agent On Lithology of Porous MediawasayrazaNo ratings yet
- Improved HSe Profile of Green StimulationDocument6 pagesImproved HSe Profile of Green StimulationwasayrazaNo ratings yet
- Annual Report)Document149 pagesAnnual Report)junaid ahmadNo ratings yet
- Franchi 2008Document9 pagesFranchi 2008wasayrazaNo ratings yet
- Chelating Agent in SandstoneDocument16 pagesChelating Agent in SandstonewasayrazaNo ratings yet
- Multichelate Acid With Low Damage and Weak DissolutionDocument12 pagesMultichelate Acid With Low Damage and Weak Dissolutionsuhaimi manNo ratings yet
- The Hub Power Company Limited - Material InformationDocument1 pageThe Hub Power Company Limited - Material InformationwasayrazaNo ratings yet
- Thomas 1981Document10 pagesThomas 1981wasayrazaNo ratings yet
- TAS Technical Reference ManualDocument58 pagesTAS Technical Reference ManualBrayan ONo ratings yet
- FACT ManualDocument22 pagesFACT ManualOscar RamirezNo ratings yet
- A Report Says The End To The Kafala System Is Also Aimed at Promoting Economic Growth and Expanding Commercial ActivitiesDocument2 pagesA Report Says The End To The Kafala System Is Also Aimed at Promoting Economic Growth and Expanding Commercial ActivitieswasayrazaNo ratings yet
- Saudi host tells firms to lay off foreigners over locals amid pandemicDocument3 pagesSaudi host tells firms to lay off foreigners over locals amid pandemicwasayrazaNo ratings yet
- SPE-176195-MS Coiled Tubing Gas Lift Design and Troubleshooting - Case HistoryDocument6 pagesSPE-176195-MS Coiled Tubing Gas Lift Design and Troubleshooting - Case HistoryManuel ChNo ratings yet
- Tech-Calculated PH Values HCLDocument3 pagesTech-Calculated PH Values HCLNurlaila Ela IlaNo ratings yet
- Gullf NewsDocument2 pagesGullf NewswasayrazaNo ratings yet
- Continuous Warnings: Second WaveDocument3 pagesContinuous Warnings: Second WavewasayrazaNo ratings yet
- Prayer Log: Date Fajr Zuhur Asr Maghrib IshaDocument1 pagePrayer Log: Date Fajr Zuhur Asr Maghrib IshawasayrazaNo ratings yet
- 2017 Petrobowl Championship, Usa: Team DetailsDocument1 page2017 Petrobowl Championship, Usa: Team DetailswasayrazaNo ratings yet
- HSEQ PresentationDocument9 pagesHSEQ PresentationwasayrazaNo ratings yet
- Mcleod1966 PDFDocument11 pagesMcleod1966 PDFwasayrazaNo ratings yet
- Quote 201924mayDocument32 pagesQuote 201924maywasayrazaNo ratings yet
- The Building Site: Arch. Rolando Z. Saldivar-UAP Department of Architecture Technological Institute of The Philippines, QCDocument26 pagesThe Building Site: Arch. Rolando Z. Saldivar-UAP Department of Architecture Technological Institute of The Philippines, QCkatherine oblefiasNo ratings yet
- Artoaj MS Id 556022Document10 pagesArtoaj MS Id 556022Mehari TemesgenNo ratings yet
- Modulus of Subgrade Reaction - Which One To UseDocument11 pagesModulus of Subgrade Reaction - Which One To Usedubai_santanuNo ratings yet
- Land Capability Classification SystemDocument14 pagesLand Capability Classification SystemRajendran PeriyasamyNo ratings yet
- PESTICIDE CLASSIFICATION GUIDEDocument24 pagesPESTICIDE CLASSIFICATION GUIDELykaNo ratings yet
- Potato Value ChainDocument29 pagesPotato Value ChainTahir AliNo ratings yet
- Universiti Teknologi Mara Final Examination: Course ECG353 December 2019 Time 3 HoursDocument7 pagesUniversiti Teknologi Mara Final Examination: Course ECG353 December 2019 Time 3 HourssamelNo ratings yet
- TO1-Group-5 Soil Mechanics Lab Experiment No. 4Document7 pagesTO1-Group-5 Soil Mechanics Lab Experiment No. 4Xam AcostaNo ratings yet
- Smart Techniques For Improving Water Use UnderDocument10 pagesSmart Techniques For Improving Water Use UnderNouhaila NMNo ratings yet
- Soil Science and Management 6th Edition Edward Plaster Test BankDocument20 pagesSoil Science and Management 6th Edition Edward Plaster Test Bankkilergstudiousdrgyo100% (24)
- Paper in Research.... (Rip)Document58 pagesPaper in Research.... (Rip)Mar Jerome Tomas100% (1)
- Research Progress On The Watershed Sediment Delivery RatioDocument17 pagesResearch Progress On The Watershed Sediment Delivery RatioMax SteelNo ratings yet
- EGTOP Final Report on Cleaning and DisinfectionDocument54 pagesEGTOP Final Report on Cleaning and DisinfectionEnvirolyte Solutions InternationalNo ratings yet
- Major Components of Micro-Irrigation SystemDocument40 pagesMajor Components of Micro-Irrigation Systempink girlNo ratings yet
- GeoEng2000 Conference Proceedings/TITLEDocument59 pagesGeoEng2000 Conference Proceedings/TITLESidharth MahajanNo ratings yet
- Chapter 12Document22 pagesChapter 12muhammad yaseenNo ratings yet
- An Analytical Model For Evaporation Form Unsuturaded SoilDocument10 pagesAn Analytical Model For Evaporation Form Unsuturaded SoilArtur CunhaNo ratings yet
- Design and Development of Jatropha Oil Expelling MachineDocument63 pagesDesign and Development of Jatropha Oil Expelling MachineTalha yasinNo ratings yet
- LEC# 3 (Chapter 2, Text) : Crop Water Requirements (CWR)Document44 pagesLEC# 3 (Chapter 2, Text) : Crop Water Requirements (CWR)naeem ullahNo ratings yet
- Shalom 10Document61 pagesShalom 10Jemal KubeNo ratings yet
- Maxima 2: Pneumatic Precision Seed DrillsDocument36 pagesMaxima 2: Pneumatic Precision Seed DrillsJános FarkasNo ratings yet
- Codex Alimentarius PDFDocument71 pagesCodex Alimentarius PDFMelo MassionaNo ratings yet