You might also like
- Cultivo de Cacao 1Document50 pagesCultivo de Cacao 1jhan carlosNo ratings yet
- Plan Maestro Cultura ADocument72 pagesPlan Maestro Cultura AAngel MescuaNo ratings yet
- TesisDocument2 pagesTesisLOPEZ GALLARDO luisNo ratings yet
- Seminario Tesis Unidad Aprendizaje I 2011 IIDocument32 pagesSeminario Tesis Unidad Aprendizaje I 2011 IICarlos Caballero CasanovaNo ratings yet
- Consumo de Los Vegetales DoDocument7 pagesConsumo de Los Vegetales DoLOPEZ GALLARDO luisNo ratings yet
- PresentacionDocument29 pagesPresentacionLOPEZ GALLARDO luisNo ratings yet
- Exmen de Procesos PARCIALDocument4 pagesExmen de Procesos PARCIALLOPEZ GALLARDO luisNo ratings yet
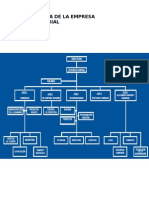
- Estructura OrganizacionalDocument27 pagesEstructura Organizacionaldaniela bear100% (7)
- AGROINDUSTRIADocument11 pagesAGROINDUSTRIALOPEZ GALLARDO luisNo ratings yet
- Enbutido de Queso de ChanchoDocument5 pagesEnbutido de Queso de ChanchoLOPEZ GALLARDO luisNo ratings yet
- Admin Is Trac Ion 5 Ciclo - Lopez Gallardo LuisDocument3 pagesAdmin Is Trac Ion 5 Ciclo - Lopez Gallardo LuisLOPEZ GALLARDO luisNo ratings yet
- Examen de ProcesosDocument4 pagesExamen de ProcesosLOPEZ GALLARDO luisNo ratings yet
- Practica (1) ..Document7 pagesPractica (1) ..LOPEZ GALLARDO luis100% (2)
- Origen de La Vida ADocument3 pagesOrigen de La Vida ALOPEZ GALLARDO luisNo ratings yet
- Diagrama de Flujo de Procesos Pan de ArbolDocument24 pagesDiagrama de Flujo de Procesos Pan de ArbolLOPEZ GALLARDO luis50% (2)
- PRACTICA EnzimaticaDocument12 pagesPRACTICA EnzimaticaLOPEZ GALLARDO luis100% (1)
- Ventajas Competitivas PeruDocument9 pagesVentajas Competitivas PeruLOPEZ GALLARDO luisNo ratings yet
- Carta de Las BacteriasDocument2 pagesCarta de Las BacteriasLOPEZ GALLARDO luisNo ratings yet
- Contenedores Lima Peru (Telsup)Document10 pagesContenedores Lima Peru (Telsup)LOPEZ GALLARDO luisNo ratings yet
- Trabajo Final MicrococcussssDocument14 pagesTrabajo Final MicrococcussssLOPEZ GALLARDO luis100% (9)
- Transformación Del Calor Con Uso Del VaporDocument5 pagesTransformación Del Calor Con Uso Del VaporLOPEZ GALLARDO luisNo ratings yet
- Biologia EvolutivaDocument1 pageBiologia EvolutivaLOPEZ GALLARDO luisNo ratings yet
- Tema Produccion de ChorizoDocument8 pagesTema Produccion de ChorizoLOPEZ GALLARDO luis71% (7)
- Practica Timcion GranDocument7 pagesPractica Timcion GranLOPEZ GALLARDO luis100% (5)
- Examen 1-1C-2012 Solucion PDFDocument9 pagesExamen 1-1C-2012 Solucion PDFSharon Tello VillegasNo ratings yet
- Resumen Parcial 2 Quimica GeneralDocument15 pagesResumen Parcial 2 Quimica GeneralFiorella GrossiNo ratings yet
- Problemas de Conversión de UnidadesDocument11 pagesProblemas de Conversión de UnidadesViviana Paloma Peñaloza Meza100% (1)
- Tarea Leyes NewtonDocument3 pagesTarea Leyes NewtonXimena GutiérrezNo ratings yet
- Fisica Pre U Inv21 03 Cinematica CurvilineaDocument4 pagesFisica Pre U Inv21 03 Cinematica CurvilineaBelen0% (1)
- 1Document14 pages1chaito0% (1)
- Tarea Departamental 2Document18 pagesTarea Departamental 2Lupita MorenoNo ratings yet
- Practica 1 3CM2 PDFDocument6 pagesPractica 1 3CM2 PDFNicolás MGNo ratings yet
- Fisica 3Document20 pagesFisica 3Jesus SiesquenNo ratings yet
- Serie Ae EsDocument5 pagesSerie Ae Essoffter2000No ratings yet
- Leyes de NewtonDocument7 pagesLeyes de NewtonEden GhezziNo ratings yet
- Densidad y PresionDocument1 pageDensidad y PresionBoi SwackNo ratings yet
- Análisis de Estabilidad Mediante Psat de Ieee 14 y Ieee39Document16 pagesAnálisis de Estabilidad Mediante Psat de Ieee 14 y Ieee39Johann Fernández De CastroNo ratings yet
- Problemas Secadores - DEBER FINALDocument2 pagesProblemas Secadores - DEBER FINALElieser AnbuNo ratings yet
- Presurización de Escaleras ASHRAE JULIO - 2011Document94 pagesPresurización de Escaleras ASHRAE JULIO - 2011carlo jose cortez montano100% (1)
- PotenciaCA-FactPotenciaDocument29 pagesPotenciaCA-FactPotenciaDiego Llave ChiloNo ratings yet
- 4.2. s07. Práctica de Trabajo MecánicoDocument2 pages4.2. s07. Práctica de Trabajo MecánicoJILMER WILLY PASHANASE ISHUIZANo ratings yet
- Lp12520a 0310 S050 F900 Let 00105 - Rev0Document6 pagesLp12520a 0310 S050 F900 Let 00105 - Rev0jorgeNo ratings yet
- Apuntes de Física 1o BachilleratoDocument159 pagesApuntes de Física 1o BachilleratoFrancisco GonzalezNo ratings yet
- Característica de Potencia – Ángulo en Estado Estable y Cálculo de Par Máximo para un Motor SíncronicoDocument20 pagesCaracterística de Potencia – Ángulo en Estado Estable y Cálculo de Par Máximo para un Motor SíncronicoGary YagualNo ratings yet
- Exposicion RK Cuarto OrdenDocument37 pagesExposicion RK Cuarto OrdenJordi Kevin Ayala LauraNo ratings yet
- RESISTENCIADocument3 pagesRESISTENCIAJIMMY ROLANDO BAYONA ASCANIONo ratings yet
- Coeficiente de resistencia fluidoDocument10 pagesCoeficiente de resistencia fluidoWilliamNo ratings yet
- Solución a los ejercicios de autoevaluación sobre movimientos vibratoriosDocument14 pagesSolución a los ejercicios de autoevaluación sobre movimientos vibratoriosAlicia García FernándezNo ratings yet
- Densidad Según ArquímedesDocument2 pagesDensidad Según Arquímedescamila cardozoNo ratings yet
- Diagrama de Flujo - ASTM D1298 - Cintia Felix PDFDocument1 pageDiagrama de Flujo - ASTM D1298 - Cintia Felix PDFCintia FelixNo ratings yet
- SOLUCIONARIO DE LA 3ra PRÁCTICA DE OPERACIONES INDUSTRIALES PDFDocument5 pagesSOLUCIONARIO DE LA 3ra PRÁCTICA DE OPERACIONES INDUSTRIALES PDFMariza RiquezNo ratings yet
- Solucionario Ejercitario Actividad 1.4Document10 pagesSolucionario Ejercitario Actividad 1.4Jazmin Ruiz DiazNo ratings yet
- Reparto de Carga Entre Generadores en ParaleloDocument5 pagesReparto de Carga Entre Generadores en ParaleloEduardo SolanoNo ratings yet
- Física I: Movimiento parabólico de proyectilesDocument31 pagesFísica I: Movimiento parabólico de proyectilesingenieracontableNo ratings yet