You might also like
- Test Your C Skills by "Yashwant Kanetkar"Document129 pagesTest Your C Skills by "Yashwant Kanetkar"bestddl82% (28)
- Treasure Hunt: Event ObjectiveDocument4 pagesTreasure Hunt: Event ObjectivemgitecetechNo ratings yet
- Wrestle ManiacDocument3 pagesWrestle ManiacmgitecetechNo ratings yet
- Job Fair in MgitDocument4 pagesJob Fair in MgitmgitecetechNo ratings yet
- Death RaceDocument3 pagesDeath RacemgitecetechNo ratings yet
- Catch Me If U CanDocument5 pagesCatch Me If U CanmgitecetechNo ratings yet
- Job Fair in Mgit1Document3 pagesJob Fair in Mgit1mgitecetechNo ratings yet
- ROBOLIGADocument4 pagesROBOLIGAmgitecetechNo ratings yet
- ROBOPIRATES Version 1.o: Event ObjectiveDocument4 pagesROBOPIRATES Version 1.o: Event ObjectivemgitecetechNo ratings yet
- ROBO's Royal RumbleDocument3 pagesROBO's Royal RumblemgitecetechNo ratings yet
- IJCTA Author InstructionDocument2 pagesIJCTA Author InstructionShashank BholaneNo ratings yet
- Instructions For Royal RummbleDocument3 pagesInstructions For Royal RummblemgitecetechNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- HA-646 BrochureDocument1 pageHA-646 BrochureFelhazi AndreiNo ratings yet
- 8051 MicrocontrollerDocument40 pages8051 MicrocontrollerHiru Purushothaman Hirudayanathan100% (1)
- Course Instructor Dr.M.K.Kavitha Devi, Professor/CSE, TCEDocument43 pagesCourse Instructor Dr.M.K.Kavitha Devi, Professor/CSE, TCEbaby sivakumarNo ratings yet
- Shenzhen Noridc - BLE Sensor AppDocument54 pagesShenzhen Noridc - BLE Sensor AppAlina AnaNo ratings yet
- Dmesg TutorialDocument2 pagesDmesg TutorialSlim ShadyNo ratings yet
- Mib JNX FruDocument4 pagesMib JNX FruscorcdNo ratings yet
- Temperature Measurement RTD & Thermisters: Topic 5Document15 pagesTemperature Measurement RTD & Thermisters: Topic 5laily_78No ratings yet
- Python MCQDocument123 pagesPython MCQAbhishek Gunjal0% (1)
- Operating System Lab ActivityDocument2 pagesOperating System Lab ActivityBernadette AycochoNo ratings yet
- COA Question BankDocument2 pagesCOA Question BankChizuru SinghNo ratings yet
- Esab Caddy Tig-2200i Ac-Dc 718-xxx To 843-xxxDocument64 pagesEsab Caddy Tig-2200i Ac-Dc 718-xxx To 843-xxxhitano12100% (1)
- APC 10 Instruction Manual PDFDocument64 pagesAPC 10 Instruction Manual PDFELSAKHWAYNo ratings yet
- EE 351 Spring 2021 Homework 6 SolutionsDocument21 pagesEE 351 Spring 2021 Homework 6 SolutionsKalenNo ratings yet
- Fixed SQRTDocument3 pagesFixed SQRTjarielmarNo ratings yet
- Smart Arduino Touch Switch Board For Home Automation: Internal Guide - Prof. Satish Nimbalkar G - 23 (Members)Document10 pagesSmart Arduino Touch Switch Board For Home Automation: Internal Guide - Prof. Satish Nimbalkar G - 23 (Members)Shivam YadavNo ratings yet
- Bhavesh Chandraprakash 14487494 202201200840 ResumeDocument3 pagesBhavesh Chandraprakash 14487494 202201200840 ResumeGaurav AgrawalNo ratings yet
- Error Handling in ASPDocument116 pagesError Handling in ASPkagga1980No ratings yet
- 3ds Emulator With Bios For PC and Mac - Pokemon X and y SuppDocument1 page3ds Emulator With Bios For PC and Mac - Pokemon X and y SuppGabriel O'HaraNo ratings yet
- Billing Project PythonDocument21 pagesBilling Project PythonSONAM SHRIVASTAV100% (5)
- PCS-915C - X - Instruction Manual - EN - Domestic General - X - R1.01Document232 pagesPCS-915C - X - Instruction Manual - EN - Domestic General - X - R1.01Quân BùiNo ratings yet
- EE337 Lab6Document2 pagesEE337 Lab6SenseiNo ratings yet
- MIPI CSI2 Document Ver2.0Document101 pagesMIPI CSI2 Document Ver2.0prudhvir416No ratings yet
- From Design To Design Automation: Jason CongDocument5 pagesFrom Design To Design Automation: Jason CongRahil HussainNo ratings yet
- Manual de Servicio Escaner Scanelite 5400Document34 pagesManual de Servicio Escaner Scanelite 5400erizo999No ratings yet
- GSM-R/ETCS Integration ReviewDocument82 pagesGSM-R/ETCS Integration ReviewTiémogo TRAORENo ratings yet
- Eventide H910-HK941 Harmonizer ManualDocument11 pagesEventide H910-HK941 Harmonizer ManualAlex HAIKINENo ratings yet
- Artemis TrainingDocument5 pagesArtemis TrainingAgellos KoursarisNo ratings yet
- PLL MatlabDocument9 pagesPLL MatlabGiovanny CuzcoNo ratings yet
- Technical Specifications SB1000z: FeaturesDocument2 pagesTechnical Specifications SB1000z: FeaturesTC Sinan ÜzenliNo ratings yet
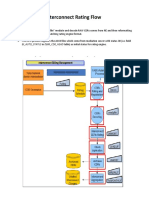
- Interconnect Rating FlowDocument5 pagesInterconnect Rating FlowShahzad AlviNo ratings yet