You might also like
- MetalografiaDocument9 pagesMetalografiaAntonio Marcos SilvaNo ratings yet
- Guia completo para manutenção de redutores M.B.JDocument11 pagesGuia completo para manutenção de redutores M.B.JDayvison LúcioNo ratings yet
- Óleos Lubrificantes para Engrenagens - LUBRAX GEARDocument3 pagesÓleos Lubrificantes para Engrenagens - LUBRAX GEARFábio Lessa100% (1)
- AGMA Desgaste Superficial PDFDocument7 pagesAGMA Desgaste Superficial PDFadrianoNo ratings yet
- Engrenagens: tipos e aplicaçõesDocument56 pagesEngrenagens: tipos e aplicaçõesEduardo Barbosa Leal100% (1)
- Análise de RedutoresDocument160 pagesAnálise de RedutoresPatrick Jove100% (1)
- Estudo de contaminação em sistema de lubrificação de turbina a vaporDocument90 pagesEstudo de contaminação em sistema de lubrificação de turbina a vaporlcesarmcostaNo ratings yet
- Seleção eletrônica de redutores FLENDER BRASILDocument15 pagesSeleção eletrônica de redutores FLENDER BRASILreinaldo sNo ratings yet
- Escolha da tolerância do colo do mancal de acordo com a DIN31690Document14 pagesEscolha da tolerância do colo do mancal de acordo com a DIN31690Silmar BiazioliNo ratings yet
- Manual de Instalação REXNORDDocument4 pagesManual de Instalação REXNORDEleno RibeiroNo ratings yet
- Soluções de vedação K2 K5 K6Document2 pagesSoluções de vedação K2 K5 K6robertodepaula_rcNo ratings yet
- Aula 01-EngrenagensDocument15 pagesAula 01-EngrenagensGilbert Oliveira100% (1)
- Catálogo BGL BuchasDocument15 pagesCatálogo BGL BuchasBraz Pataro NetoNo ratings yet
- Montagem de caixas e rolamentos de máquinasDocument4 pagesMontagem de caixas e rolamentos de máquinasBraz Pataro NetoNo ratings yet
- Novo CatalogoDocument16 pagesNovo CatalogoWallisson FernandesNo ratings yet
- ELEMENTOS DE MÁQUINAS I-Ernani Sales PalmaDocument108 pagesELEMENTOS DE MÁQUINAS I-Ernani Sales PalmaLeandro RibeiroNo ratings yet
- Cat Coaxial Internet 2013 Cat Tecnico PDFDocument182 pagesCat Coaxial Internet 2013 Cat Tecnico PDFRafael Oliveira CarvalhoNo ratings yet
- Balanceamento de rotores rígidosDocument30 pagesBalanceamento de rotores rígidosHelena Silva100% (2)
- Catalogo Conimax PDFDocument124 pagesCatalogo Conimax PDFEverton JoniNo ratings yet
- Tecnologia de Ligação Mais Inteligente para o Turboacoplamento Voith. GPKDocument2 pagesTecnologia de Ligação Mais Inteligente para o Turboacoplamento Voith. GPKArthur CunhaNo ratings yet
- Mecanismos 06 PDFDocument26 pagesMecanismos 06 PDFHelenaXFabianoCamposNo ratings yet
- Planetários: potentes redutores para indústriasDocument20 pagesPlanetários: potentes redutores para indústriasJonasNo ratings yet
- Relatorio Do Projeto Do Redutor FinalDocument28 pagesRelatorio Do Projeto Do Redutor FinalRafael Fernando Prestes50% (2)
- Redutor de VelocidadeDocument4 pagesRedutor de VelocidadeMsinhoNo ratings yet
- Roda PerpetuaDocument12 pagesRoda PerpetuafabianoNo ratings yet
- Catalogo Ferramentas Construção Civil VonderDocument38 pagesCatalogo Ferramentas Construção Civil VonderSavio GamaNo ratings yet
- Analise de Falha Nos Redutores de Velocidade Benzlers PDFDocument95 pagesAnalise de Falha Nos Redutores de Velocidade Benzlers PDFsyrNo ratings yet
- Folga nos dentes e backlash: o que é e como calcularDocument16 pagesFolga nos dentes e backlash: o que é e como calcularAbelio TavaresNo ratings yet
- Roda-livre e contra-recuo VulkanDocument24 pagesRoda-livre e contra-recuo VulkanAyrton AbrantesNo ratings yet
- Mancais PDFDocument12 pagesMancais PDFRoberto De Oliveira100% (1)
- RKB ROVSX: Rolamentos autocompensadores para máquinas vibratóriasDocument15 pagesRKB ROVSX: Rolamentos autocompensadores para máquinas vibratóriasAntonio NunesNo ratings yet
- FAG - Mancais e Rolamentos PDFDocument12 pagesFAG - Mancais e Rolamentos PDFAlex LinsNo ratings yet
- Engrenagens helicoidaisDocument11 pagesEngrenagens helicoidaistheuseguigo CazarinNo ratings yet
- ISO 1940 BalanceamentoDocument11 pagesISO 1940 BalanceamentoViviane Alves Loureiro de SousaNo ratings yet
- Estudo Da Fadiga de Contato em Engrenagens Cilíndricas de Dentes RetosDocument187 pagesEstudo Da Fadiga de Contato em Engrenagens Cilíndricas de Dentes RetosGustavo JavorskiNo ratings yet
- Magma Redutores e Motorredutores de Rosca sem fim Catálogo 2002Document114 pagesMagma Redutores e Motorredutores de Rosca sem fim Catálogo 2002jonathanNo ratings yet
- Manual SD400 1D SD600 1DDocument2 pagesManual SD400 1D SD600 1DMário BassoliNo ratings yet
- Catalogo Correias Industriais 2015 WebDocument64 pagesCatalogo Correias Industriais 2015 WebEleandro JoaquimNo ratings yet
- Alinhamento de equipamentos a laserDocument11 pagesAlinhamento de equipamentos a laserLeandro Alves SantosNo ratings yet
- Tabela de AçosDocument2 pagesTabela de AçosFabio DantasNo ratings yet
- Novo Projeto Do TornoDocument1 pageNovo Projeto Do TornoRicardo Antonio PrestesNo ratings yet
- Acoplamentos Flender4600ptDocument38 pagesAcoplamentos Flender4600ptMarcNo ratings yet
- Volante de InérciaDocument5 pagesVolante de InérciaGabriel MNo ratings yet
- Apostila Tribologia PDFDocument17 pagesApostila Tribologia PDFjonalthan1987No ratings yet
- Cat Coaxial 2016Document182 pagesCat Coaxial 2016João Diego FeitosaNo ratings yet
- Diagnóstico Rápido RolamentosDocument36 pagesDiagnóstico Rápido RolamentosaukanaiiNo ratings yet
- Redutores técnicosDocument6 pagesRedutores técnicosCarlinho NicolaNo ratings yet
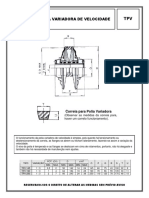
- Polia Variadora de Velocidade TPVDocument1 pagePolia Variadora de Velocidade TPVPhilaletoIrineusNo ratings yet
- Redutores industriais versáteis e potentesDocument8 pagesRedutores industriais versáteis e potentesjef1982No ratings yet
- Manual de instruções para operação e manutenção de turbo redutorDocument169 pagesManual de instruções para operação e manutenção de turbo redutorrocadinhoNo ratings yet
- Transmissão Por Correntes de RolosDocument16 pagesTransmissão Por Correntes de RolospaulohkNo ratings yet
- Porcas e ArruelasDocument29 pagesPorcas e ArruelasThiago MonteiroNo ratings yet
- Projeto de Engrenagens - OfICIALDocument18 pagesProjeto de Engrenagens - OfICIALBruna NayaraNo ratings yet
- Dimensões e Codificação de RolamentosDocument4 pagesDimensões e Codificação de RolamentosVitor Joel Chaves100% (1)
- Engrenagens helicoidais: conceitos e aplicações emDocument11 pagesEngrenagens helicoidais: conceitos e aplicações emmathewsqsNo ratings yet
- Exercício ECDRDocument12 pagesExercício ECDRflaviocolmanNo ratings yet
- Engrenagens cilíndricas de dentes helicoidaisDocument6 pagesEngrenagens cilíndricas de dentes helicoidaisKeel PapiniNo ratings yet
- Apostila EngrenagensDocument37 pagesApostila EngrenagensGabriel FerreiraNo ratings yet
- Folha Com LinhasDocument2 pagesFolha Com LinhasdiegonssoNo ratings yet
- Jateamento de GranalhaDocument1 pageJateamento de GranalhadiegonssoNo ratings yet
- Exercícios MG0001Document23 pagesExercícios MG0001diegonssoNo ratings yet
- RESUMODocument9 pagesRESUMOdiegonssoNo ratings yet
- Usando unidades de medida em MecânicaDocument11 pagesUsando unidades de medida em MecânicaCláudio BarretosNo ratings yet
- Transmisso Da SfilisDocument1 pageTransmisso Da SfilisdiegonssoNo ratings yet
- Big BangDocument13 pagesBig BangdiegonssoNo ratings yet
- Calendario ETS Agosto 2019Document5 pagesCalendario ETS Agosto 2019Timo SstNo ratings yet
- Haulotte 20 260Document114 pagesHaulotte 20 260Paulo VitorNo ratings yet
- Medição de peso com strain gage e amplificadorDocument12 pagesMedição de peso com strain gage e amplificadorSérgio AndolfoNo ratings yet
- Balancim: manual de bolso para trabalho em alturaDocument5 pagesBalancim: manual de bolso para trabalho em alturaSilvia SouzaNo ratings yet
- Catálogo peças automotivasDocument6 pagesCatálogo peças automotivasDiogo FernandesNo ratings yet
- Protocolo JC3IEDM para Integração de Sistemas C2 resume de forma concisa e relevante para o o tema central do documento, que é a proposta de um protocolo baseado no modelo JC3IEDMDocument85 pagesProtocolo JC3IEDM para Integração de Sistemas C2 resume de forma concisa e relevante para o o tema central do documento, que é a proposta de um protocolo baseado no modelo JC3IEDMPatrick LaraNo ratings yet
- Apostila Sobre Resíduos SólidosDocument16 pagesApostila Sobre Resíduos SólidosMario SergioNo ratings yet
- Motores Inducao ConstrucaoDocument39 pagesMotores Inducao ConstrucaoLudimila XavierNo ratings yet
- Resina acrílica na odontologiaDocument24 pagesResina acrílica na odontologiaMirelly Pinto de OliveiraNo ratings yet
- Desenvolvimento em Camadas com C# .NetDocument3 pagesDesenvolvimento em Camadas com C# .NetJhonathanCarvo0% (1)
- Macaco HidráulicoDocument6 pagesMacaco HidráulicoGusttavo FragaNo ratings yet
- Termo de Referencia COPASADocument20 pagesTermo de Referencia COPASARobertoNo ratings yet
- Exercicios de Eletronica AnalogicaDocument5 pagesExercicios de Eletronica AnalogicaMaitsudá MatosNo ratings yet
- Folder SisigrejaDocument2 pagesFolder Sisigrejasegtenmartins@gmail.comNo ratings yet
- QbladeDocument32 pagesQbladePatrickAndrade100% (1)
- Lavadora Intech HL 1800 - Manual de Instruções de UsuárioDocument12 pagesLavadora Intech HL 1800 - Manual de Instruções de UsuárioMax MouraNo ratings yet
- Master PDFDocument104 pagesMaster PDFRichardson Garcia100% (1)
- Medição de ângulos e distânciasDocument12 pagesMedição de ângulos e distânciasoperigrinoNo ratings yet
- Estudo de caso sobre serviços de troca de óleo na Xpresso LubeDocument4 pagesEstudo de caso sobre serviços de troca de óleo na Xpresso LubeADIEL CORREA LOPESNo ratings yet
- Elementos elétricos passivosDocument21 pagesElementos elétricos passivosFilipe PradoNo ratings yet
- Grau de precisão e suporte para medições acima de até 16000Document1 pageGrau de precisão e suporte para medições acima de até 16000Amj PrintNo ratings yet
- Impermeabilização ContençõesDocument3 pagesImpermeabilização ContençõesPedro AguiarNo ratings yet
- Siderurgia e Tratamento Térmico Dos Aços - UNIVERSIDADE - DO - ESTADO - DO - RIO - DE - JANEIRODocument60 pagesSiderurgia e Tratamento Térmico Dos Aços - UNIVERSIDADE - DO - ESTADO - DO - RIO - DE - JANEIROGustavo PraesNo ratings yet
- GKS 7 1/4 Circular Saw InstructionsDocument20 pagesGKS 7 1/4 Circular Saw InstructionsHeitor NoratNo ratings yet
- Relatorio 7 TCA 785Document4 pagesRelatorio 7 TCA 785Josevaldo ArrudaNo ratings yet
- Cálculo vetorial e integrais de linhaDocument4 pagesCálculo vetorial e integrais de linhaFernando Henrique BacchiNo ratings yet
- Cap 1 Manual TecnicoDocument13 pagesCap 1 Manual TecnicoWillNo ratings yet
- Mod64v01-03-11109 - Port PDFDocument2 pagesMod64v01-03-11109 - Port PDFffppxxzzNo ratings yet
- Aula 01 - Instrumentação IndustrialDocument25 pagesAula 01 - Instrumentação IndustrialPaula Gonçalves de SouzaNo ratings yet
- Resistencia Dos Materiais - Terceira Lista de ExerciciosDocument4 pagesResistencia Dos Materiais - Terceira Lista de ExerciciosLucio SantosNo ratings yet