You might also like
- Paper 8905Document4 pagesPaper 8905IJARSCT JournalNo ratings yet
- A Survey On Blue Eyes Technology IJERTCONV8IS04020Document4 pagesA Survey On Blue Eyes Technology IJERTCONV8IS04020Meghana K SNo ratings yet
- 10.1109@ICCSP48568.2020.9182296Document4 pages10.1109@ICCSP48568.2020.9182296deekshadeeku550No ratings yet
- Hci With Hand Gesture Recognition Using Machine Learning AlgorithmsDocument6 pagesHci With Hand Gesture Recognition Using Machine Learning AlgorithmsAnu s sNo ratings yet
- Overview of Gesture Recognition Based Virtual Mouse and KeyboardDocument6 pagesOverview of Gesture Recognition Based Virtual Mouse and KeyboardIJRASETPublicationsNo ratings yet
- Controlled Hand Gestures Using Python and OpenCVDocument7 pagesControlled Hand Gestures Using Python and OpenCVIJRASETPublicationsNo ratings yet
- Blue Eye Technology IRE Journal: January 2018Document6 pagesBlue Eye Technology IRE Journal: January 2018Prince ShankarNo ratings yet
- HCI Based Virtual Controlling SystemDocument8 pagesHCI Based Virtual Controlling SystemIJRASETPublicationsNo ratings yet
- Hand Gesture Controlled Virtual Mouse Using Artificial Intelligence Ijariie19380Document14 pagesHand Gesture Controlled Virtual Mouse Using Artificial Intelligence Ijariie19380Rr RrNo ratings yet
- Blue Eye Technology - Future of ComputersDocument13 pagesBlue Eye Technology - Future of Computerslavanya_rajasekaran100% (9)
- Computer, and Then It Tells You "Hey Friend,: Emotion MouseDocument14 pagesComputer, and Then It Tells You "Hey Friend,: Emotion Mouseakshay999No ratings yet
- 6th Sense TechDocument26 pages6th Sense TechKalyani SreenithaNo ratings yet
- User Interface and User Experience For Virtual Reality Using Biopotential: A Virtual Reality System With Cross Platform and Plug-and-Play CapabilityDocument5 pagesUser Interface and User Experience For Virtual Reality Using Biopotential: A Virtual Reality System With Cross Platform and Plug-and-Play CapabilityInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Hand Gesture Mouse Recognition Implementation To Replace Hardware Mouse Using AIDocument6 pagesHand Gesture Mouse Recognition Implementation To Replace Hardware Mouse Using AIGaurav MunjewarNo ratings yet
- Real Time Feature Based Face Detection and Tracking CursorDocument3 pagesReal Time Feature Based Face Detection and Tracking CursorInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Construction and Workings: Sixthsense Is A Wearable Gestural InterfaceDocument10 pagesConstruction and Workings: Sixthsense Is A Wearable Gestural InterfacetejaswiannuNo ratings yet
- Blue Eyes TechnologyDocument24 pagesBlue Eyes Technologydhawanabhishek116327No ratings yet
- Virtual Mouse Using AI and Computer VisionDocument4 pagesVirtual Mouse Using AI and Computer VisionInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Hand-Mouse Interface Using Virtual Monitor Concept For Natural InteractionDocument8 pagesHand-Mouse Interface Using Virtual Monitor Concept For Natural Interactionamulya allenaNo ratings yet
- Ai Virtual Mouse-1Document11 pagesAi Virtual Mouse-1dalaisai1234No ratings yet
- Blue Eye TechnologyDocument5 pagesBlue Eye TechnologyIJRASETPublicationsNo ratings yet
- Design and Evaluation of A Computer-Actuated MouseDocument1 pageDesign and Evaluation of A Computer-Actuated Mousemamillapalli sri harshaNo ratings yet
- Virtual Human Interaction System Using CV LearnDocument7 pagesVirtual Human Interaction System Using CV LearnIJRASETPublicationsNo ratings yet
- Sixth Sense Technology 1Document24 pagesSixth Sense Technology 1heman_manmohanNo ratings yet
- Blue Eyes Technology PPT-1-1Document19 pagesBlue Eyes Technology PPT-1-1Jkm100% (1)
- Blue Eyes TechnologyDocument23 pagesBlue Eyes Technologykashishbhatia100% (1)
- Technical Seminar (22222222)Document15 pagesTechnical Seminar (22222222)19-12B1 SRIKANTHNo ratings yet
- Sambre Kar 2015Document6 pagesSambre Kar 2015DHRUBAJIT KAKATINo ratings yet
- Gesture Controlled Virtual MouseDocument8 pagesGesture Controlled Virtual MouseIJRASETPublicationsNo ratings yet
- A Seminar ON Blue Eyes Technology: Rohan Chugh 1531323107Document25 pagesA Seminar ON Blue Eyes Technology: Rohan Chugh 1531323107Nitant KapilaNo ratings yet
- A Realistic Game System Using Multi-Modal User IntDocument10 pagesA Realistic Game System Using Multi-Modal User IntKARTHIK shanaNo ratings yet
- IJRPR9994Document6 pagesIJRPR9994sureshroyals02No ratings yet
- Tech SeminarDocument13 pagesTech SeminarNaveen DhaaramNo ratings yet
- Sixth SenseDocument29 pagesSixth SenseGeethu ShajiNo ratings yet
- Real Time Sign Language RecognitionReal Time Sign Language RecognitionDocument7 pagesReal Time Sign Language RecognitionReal Time Sign Language RecognitionIJRASETPublicationsNo ratings yet
- Gesture Recognition-Based AI Virtual MouseDocument8 pagesGesture Recognition-Based AI Virtual MouseIJRASETPublicationsNo ratings yet
- Eye BallDocument5 pagesEye BallKranti SriNo ratings yet
- Eyeball Based Cursor Movement ControlDocument5 pagesEyeball Based Cursor Movement ControlVijay VijjuNo ratings yet
- Hand Gesture Based Virtual MouseDocument6 pagesHand Gesture Based Virtual MouseIJRASETPublicationsNo ratings yet
- Sixth Sense Research PaperDocument5 pagesSixth Sense Research PaperManisha Sharma67% (3)
- Eye Gesture (1)Document6 pagesEye Gesture (1)mohansomalliNo ratings yet
- Editing Ieee PaperDocument10 pagesEditing Ieee PaperMajety S LskshmiNo ratings yet
- Wireless Cursor Controller Hand Gestures For Computer NavigationDocument8 pagesWireless Cursor Controller Hand Gestures For Computer NavigationIJRASETPublicationsNo ratings yet
- Simpler Life With Sixth Sense Technology: A Report ONDocument25 pagesSimpler Life With Sixth Sense Technology: A Report ONannutejaswiNo ratings yet
- Cursor MovementDocument5 pagesCursor MovementBikash TuduNo ratings yet
- Sixth Sense Technology, VeenitDocument45 pagesSixth Sense Technology, VeenitVeenit VermaNo ratings yet
- Hand Gesture Control System Using Open CVDocument6 pagesHand Gesture Control System Using Open CVInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Untitled DocumentDocument6 pagesUntitled DocumentRoopan RajuNo ratings yet
- Sixth Sense TechnologyDocument23 pagesSixth Sense TechnologyRakshita TuliNo ratings yet
- Sixth Sense FINALDocument23 pagesSixth Sense FINALBhoomiLakshmi92% (26)
- Vitural MouseyuhjDocument4 pagesVitural Mouseyuhjvarun naikNo ratings yet
- Smart Watch PaperDocument3 pagesSmart Watch PaperJay ManeNo ratings yet
- SeminarDocument18 pagesSeminarchethankolar98No ratings yet
- Sixth Sense Technology Projector Connects Physical and Digital WorldsDocument13 pagesSixth Sense Technology Projector Connects Physical and Digital WorldsAmaravadi ShivaNo ratings yet
- CS4731 Project: Gesture RecognitionDocument20 pagesCS4731 Project: Gesture RecognitionRitish TalwarNo ratings yet
- Eye Movement Recognition Based Human Machine Interaction SystemDocument4 pagesEye Movement Recognition Based Human Machine Interaction SystemIJRASETPublicationsNo ratings yet
- Learn Computer Vision Using OpenCV: With Deep Learning CNNs and RNNsFrom EverandLearn Computer Vision Using OpenCV: With Deep Learning CNNs and RNNsNo ratings yet
- The History of Visual Magic in Computers: How Beautiful Images are Made in CAD, 3D, VR and ARFrom EverandThe History of Visual Magic in Computers: How Beautiful Images are Made in CAD, 3D, VR and ARNo ratings yet
- IeeepaperDocument14 pagesIeeepaperynikesNo ratings yet
- Creation of Data SourceDocument3 pagesCreation of Data SourceSriharsha GowdsNo ratings yet
- Technical SeminarDocument1 pageTechnical SeminarSriharsha GowdsNo ratings yet
- AESDocument48 pagesAESdipika1255No ratings yet
- JHS SLM 1 Q2 Math Grade 10 32pagesDocument32 pagesJHS SLM 1 Q2 Math Grade 10 32pagesAngel Naiza JimenezNo ratings yet
- Neptune Sign House AspectDocument80 pagesNeptune Sign House Aspectmesagirl94% (53)
- Google Fusion Tables: A Case StudyDocument4 pagesGoogle Fusion Tables: A Case StudySeanNo ratings yet
- Barriers To Lifelong LearningDocument4 pagesBarriers To Lifelong LearningVicneswari Uma SuppiahNo ratings yet
- SiargaoDocument11 pagesSiargaomalouNo ratings yet
- Shaft design exercisesDocument8 pagesShaft design exercisesIvanRosellAgustíNo ratings yet
- Balkan TribesDocument3 pagesBalkan TribesCANELO_PIANONo ratings yet
- A Personality Trait-Based Interactionist Model of Job PerformanceDocument18 pagesA Personality Trait-Based Interactionist Model of Job PerformanceAlvina AhmedNo ratings yet
- Design Theory: Boo Virk Simon Andrews Boo - Virk@babraham - Ac.uk Simon - Andrews@babraham - Ac.ukDocument33 pagesDesign Theory: Boo Virk Simon Andrews Boo - Virk@babraham - Ac.uk Simon - Andrews@babraham - Ac.ukuzma munirNo ratings yet
- Db2 Compatibility PDFDocument23 pagesDb2 Compatibility PDFMuhammed Abdul QaderNo ratings yet
- MGMT 410 Book ReportDocument1 pageMGMT 410 Book ReportLester F BoernerNo ratings yet
- Plato Aristotle Virtue Theory HappinessDocument17 pagesPlato Aristotle Virtue Theory HappinessMohd SyakirNo ratings yet
- How To Prepare Squash Specimen Samples For Microscopic ObservationDocument3 pagesHow To Prepare Squash Specimen Samples For Microscopic ObservationSAMMYNo ratings yet
- Mitchell 1986Document34 pagesMitchell 1986Sara Veronica Florentin CuencaNo ratings yet
- Space Gass 12 5 Help Manual PDFDocument841 pagesSpace Gass 12 5 Help Manual PDFNita NabanitaNo ratings yet
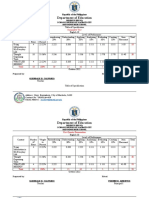
- Table of Specification ENGLISHDocument2 pagesTable of Specification ENGLISHDonn Abel Aguilar IsturisNo ratings yet
- Applying Ocs Patches: Type Area Topic AuthorDocument16 pagesApplying Ocs Patches: Type Area Topic AuthorPILLINAGARAJUNo ratings yet
- Capitalism Communism Socialism DebateDocument28 pagesCapitalism Communism Socialism DebateMr. Graham Long100% (1)
- Significance of Vaiseshika's PragabhavaDocument5 pagesSignificance of Vaiseshika's Pragabhavavskanchi0% (1)
- 1-7 Least-Square RegressionDocument23 pages1-7 Least-Square RegressionRawash Omar100% (1)
- حقيبة تعليمية لمادة التحليلات الهندسية والعدديةDocument28 pagesحقيبة تعليمية لمادة التحليلات الهندسية والعدديةAnjam RasulNo ratings yet
- Stereotype Threat Widens Achievement GapDocument2 pagesStereotype Threat Widens Achievement GapJoeNo ratings yet
- Platon Si Academia Veche de ZellerDocument680 pagesPlaton Si Academia Veche de ZellerDan BrizaNo ratings yet
- Servo Magazine 01 2005Document84 pagesServo Magazine 01 2005dangtq8467% (3)
- The Stolen Bacillus - HG WellsDocument6 pagesThe Stolen Bacillus - HG Wells1mad.cheshire.cat1No ratings yet
- User Manual: Swift S3Document97 pagesUser Manual: Swift S3smnguyenNo ratings yet
- Research ProposalDocument2 pagesResearch ProposalHo Manh LinhNo ratings yet
- Upsized To 12 Gallon Still On A 36"x56" Sheet: Pint O Shine's 6 Gallon Pot Still Design and TemplateDocument50 pagesUpsized To 12 Gallon Still On A 36"x56" Sheet: Pint O Shine's 6 Gallon Pot Still Design and TemplateyamyrulesNo ratings yet
- Evidence My Favorite PlayerDocument2 pagesEvidence My Favorite PlayerReynel Soir0% (1)
- Countable and Uncountable Nouns Lesson PlanDocument7 pagesCountable and Uncountable Nouns Lesson PlanAndrea Tamas100% (2)