You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- IEEE STD 259-1999 PDFDocument18 pagesIEEE STD 259-1999 PDFEdwin CapdepomtNo ratings yet
- Realization of Modbus ProtocolDocument98 pagesRealization of Modbus ProtocolKrishnam Raju100% (1)
- Laser HardeningDocument3 pagesLaser HardeningsaiNo ratings yet
- Panasonic KX NCP500 1000 Installation Manual PDFDocument142 pagesPanasonic KX NCP500 1000 Installation Manual PDFLuisGermainSegoviaLlanquinNo ratings yet
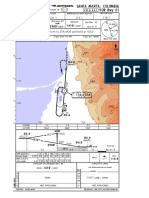
- Santa Marta, Colombia SKSM/SMR VOR Rwy 01: 13-1 119.1 118.7 VOR Cat A, B & C Simon Bolivar Intl 125.0 127.7Document1 pageSanta Marta, Colombia SKSM/SMR VOR Rwy 01: 13-1 119.1 118.7 VOR Cat A, B & C Simon Bolivar Intl 125.0 127.7Guillermo Serrano KelcyNo ratings yet
- Samsung Ue32h5000aw Chassis U8aaDocument62 pagesSamsung Ue32h5000aw Chassis U8aaBiju PrestcomNo ratings yet
- Airbus FAST60 PDFDocument40 pagesAirbus FAST60 PDFrenjithaeroNo ratings yet
- PIC18F248Document402 pagesPIC18F248Ioannis PerperisNo ratings yet
- 3281 enDocument28 pages3281 enJafarShojaNo ratings yet
- Westinghouse Lighting Fisher-Pierce 6600A-6620-6650-6690 Photocontrol Spec Sheet 8-63Document2 pagesWestinghouse Lighting Fisher-Pierce 6600A-6620-6650-6690 Photocontrol Spec Sheet 8-63Alan MastersNo ratings yet
- Lab LCDDocument6 pagesLab LCDJesus Cotrina100% (1)
- SerialsDocument7 pagesSerialsapi-3708126No ratings yet
- (SiC-En-2013-22) Molding Compounds Adhesion and Influence On Reliability of Plastic Packages For SiC-Based Power MOS DevicesDocument13 pages(SiC-En-2013-22) Molding Compounds Adhesion and Influence On Reliability of Plastic Packages For SiC-Based Power MOS Devicesnuaa_qhhNo ratings yet
- APC Smart-UPS SC BrochureDocument16 pagesAPC Smart-UPS SC BrochurePTR77No ratings yet
- 1601 0256 Aj3Document68 pages1601 0256 Aj3muayid al omaryNo ratings yet
- Optimize Hitachi Storage and Server Platforms in Vmware Vsphere 5 5 Environments Best Practices Guide PDFDocument49 pagesOptimize Hitachi Storage and Server Platforms in Vmware Vsphere 5 5 Environments Best Practices Guide PDFLars GlöcknerNo ratings yet
- Peltier Device Experiments PDFDocument4 pagesPeltier Device Experiments PDFTravisNo ratings yet
- Correntes Parasitas - TrilhosDocument10 pagesCorrentes Parasitas - TrilhosHenrique RobertoNo ratings yet
- Transformer Instruction Manual: GMX Ground Mounted TransformersDocument20 pagesTransformer Instruction Manual: GMX Ground Mounted TransformersnooruddinkhanNo ratings yet
- Datasheet LCDDocument8 pagesDatasheet LCDSebasXR100% (1)
- Slup254 PDFDocument42 pagesSlup254 PDFRaydi ElektroNo ratings yet
- Celebration of A First-Year Anniversary Attempt To Contact Some Scientific OfficialsDocument3 pagesCelebration of A First-Year Anniversary Attempt To Contact Some Scientific OfficialsRostyslav SKLYAR, Dr. (Eng)No ratings yet
- Webuser 21 August 2019Document76 pagesWebuser 21 August 2019michelleNo ratings yet
- Chang-Joon LeeDocument1 pageChang-Joon LeeCJ LeeNo ratings yet
- 4.3 Revision Notes Electric CircuitsDocument25 pages4.3 Revision Notes Electric Circuitsbipin jainNo ratings yet
- SWP-33 A Frame Machine For Soil Investigation WorkDocument1 pageSWP-33 A Frame Machine For Soil Investigation WorkHassan AbdullahNo ratings yet
- Mpeg-2 Video Compression Technique PresentationDocument12 pagesMpeg-2 Video Compression Technique PresentationPrateek Raj GautamNo ratings yet
- Drude Model: Successes and LimitationsDocument4 pagesDrude Model: Successes and LimitationsNeeraj Mosawa67% (6)
- Katalog MHPPDocument51 pagesKatalog MHPPDina ButkovićNo ratings yet
- D3 DebugDocument17 pagesD3 DebugJamesss BlackNo ratings yet