You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Enemy Territory - Quake Wars - ManualDocument22 pagesEnemy Territory - Quake Wars - ManualM_MolliNo ratings yet
- AGMA 9002-A86 Inch Bore and ANSI B17.1 Square Keyway TolerancesDocument6 pagesAGMA 9002-A86 Inch Bore and ANSI B17.1 Square Keyway TolerancesEmmanuel García100% (1)
- 350W AmplifierDocument5 pages350W AmplifiermoisesNo ratings yet
- Statistical Process Control & Cost of QualityDocument114 pagesStatistical Process Control & Cost of QualityAshraf S. Youssef100% (2)
- Power Quality Standards in ChinaDocument21 pagesPower Quality Standards in ChinaCarlos Talavera VillamarínNo ratings yet
- MBD Asrock Imb150n ManualDocument39 pagesMBD Asrock Imb150n ManualLaur IriNo ratings yet
- ASTM E1417 Penetrant Testing - 9 PDFDocument11 pagesASTM E1417 Penetrant Testing - 9 PDFbikaNo ratings yet
- Call To Order: Pledge of AllegianceDocument269 pagesCall To Order: Pledge of AllegianceBrookhaven PostNo ratings yet
- lfb10 Call PointDocument1 pagelfb10 Call PointOmar AhmedNo ratings yet
- 80312A-ENUS Error LogDocument10 pages80312A-ENUS Error LogSafdar HussainNo ratings yet
- Uahel NoticeDocument2 pagesUahel NoticeChiranjivi ChudharyNo ratings yet
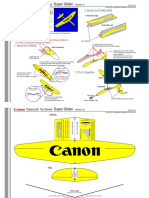
- Planeur Tres Simple PDFDocument3 pagesPlaneur Tres Simple PDFAhmedNo ratings yet
- B Indice F400 EDocument8 pagesB Indice F400 EIslam ShoukryNo ratings yet
- Greenbrier Europe Freight Wagon Catalogue (2018)Document188 pagesGreenbrier Europe Freight Wagon Catalogue (2018)Aaron Hore100% (2)
- Assimilable Organic Carbon Formation During Ultraviolet - Hydrogen Peroxide Advanced Oxidation Treatment of Surface WaterDocument207 pagesAssimilable Organic Carbon Formation During Ultraviolet - Hydrogen Peroxide Advanced Oxidation Treatment of Surface WaterMonicaRossetimNo ratings yet
- Design of Earth-Quake Resistant Multi Storied RCC Building On A Sloping GroundDocument24 pagesDesign of Earth-Quake Resistant Multi Storied RCC Building On A Sloping GroundKakula SasidharNo ratings yet
- Física Práctica 1 MRUDocument5 pagesFísica Práctica 1 MRUPolet BarrionuevoNo ratings yet
- Gear Selector CableDocument3 pagesGear Selector CableojopodoabeNo ratings yet
- Chapter 11Document50 pagesChapter 11harish9No ratings yet
- PeltonDocument7 pagesPeltonKunal Kumar DasNo ratings yet
- System Theory - Model ExamDocument2 pagesSystem Theory - Model ExamrajapandiyaNo ratings yet
- BSA D14 175 Bantam Supreme Sports Bushman Maintenance Instruction Manual PDFDocument37 pagesBSA D14 175 Bantam Supreme Sports Bushman Maintenance Instruction Manual PDFjvdkjdlkkNo ratings yet
- Language Translation Software Market Industry Size, Share, Growth, Trends, Statistics and Forecast 2014 - 2020Document9 pagesLanguage Translation Software Market Industry Size, Share, Growth, Trends, Statistics and Forecast 2014 - 2020api-289551327No ratings yet
- Assignment 1 Low Temperature and SuperconductivityDocument3 pagesAssignment 1 Low Temperature and SuperconductivityNadhrah MuradNo ratings yet
- Chapter 5Document64 pagesChapter 5pintu13No ratings yet
- Nokia c7-00 Rm-675 Rm-691 Service Manual-12 v6Document32 pagesNokia c7-00 Rm-675 Rm-691 Service Manual-12 v6sasquatch69No ratings yet
- Hyundai Heavy Industries - Gas Insulated SwitchgearDocument25 pagesHyundai Heavy Industries - Gas Insulated SwitchgearbadbenzationNo ratings yet
- Glass & Glazing WorkDocument34 pagesGlass & Glazing WorkPratik ThakkarNo ratings yet
- C# Jumpstart Module 1 IntroDocument31 pagesC# Jumpstart Module 1 IntroAnjana JayasekaraNo ratings yet
- OTN Training-Lv1-Fonst 3000 Equipment IntroductionDocument28 pagesOTN Training-Lv1-Fonst 3000 Equipment IntroductionJenny Rodriguez Aguirre100% (1)