You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Internship ReportDocument21 pagesInternship Reportshashankyuva NNo ratings yet
- PRP Machine Manual PDFDocument14 pagesPRP Machine Manual PDFaeo989850% (2)
- Generator ProtectionDocument62 pagesGenerator ProtectionCorey PorterNo ratings yet
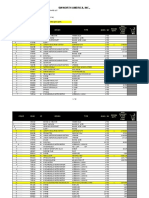
- SW North America, Inc.,: Recommended Spare PartsDocument16 pagesSW North America, Inc.,: Recommended Spare Partsmeinandacahyani salsabilaNo ratings yet
- Ex2 BrushlessDCMotorDocument8 pagesEx2 BrushlessDCMotorkewalNo ratings yet
- BS EN 60947-4-1 Low Voltage SwitchgearDocument68 pagesBS EN 60947-4-1 Low Voltage SwitchgearFenner ElectromechanicalNo ratings yet
- 2006 ICEM (Gerling - Dajaku)Document6 pages2006 ICEM (Gerling - Dajaku)nysretNo ratings yet
- D81-1 2008 English Chap00 PDFDocument140 pagesD81-1 2008 English Chap00 PDFSellappan MuthusamyNo ratings yet
- IECD Capsule NotesDocument59 pagesIECD Capsule NotesANANTHU PRADEEPNo ratings yet
- A1 - Full Papers PS2 10355 2022Document11 pagesA1 - Full Papers PS2 10355 2022DmitryNo ratings yet
- Pee6-M / Ee 3D The Short Circuit Test On Three Phase Alternator Experiment No. 2Document8 pagesPee6-M / Ee 3D The Short Circuit Test On Three Phase Alternator Experiment No. 2EmmanuelReyesIIINo ratings yet
- Inspection of Electrical Equipment: OISD - STD - 137 For Restricted CirculationDocument45 pagesInspection of Electrical Equipment: OISD - STD - 137 For Restricted CirculationanandpurushothamanNo ratings yet
- AGN 002 - Customer TrainingDocument7 pagesAGN 002 - Customer TrainingariwibowoNo ratings yet
- Literature Review of Speed Control of Induction MotorDocument4 pagesLiterature Review of Speed Control of Induction MotoraflsmperkNo ratings yet
- Ee111 L26 PDFDocument15 pagesEe111 L26 PDFGeorgi BobyNo ratings yet
- YWP111 - Application - Commissioning - Manual (2) .2012Document12 pagesYWP111 - Application - Commissioning - Manual (2) .2012maherNo ratings yet
- Elektor Electronics USA 2019 - 1-2 PDFDocument116 pagesElektor Electronics USA 2019 - 1-2 PDFLuiz Henrique Ramos100% (2)
- Aci FeDocument15 pagesAci FeHankNo ratings yet
- Electrical Machines-II Laboratory ManualDocument33 pagesElectrical Machines-II Laboratory ManualTauhidul Haque100% (1)
- Caterpillar Generator Data C175-20 2880kW 3300VDocument8 pagesCaterpillar Generator Data C175-20 2880kW 3300VWahyudi DardjatNo ratings yet
- Ed Lab ManualDocument27 pagesEd Lab ManualBonnieNo ratings yet
- DC M&T Lecture Notes - 0Document121 pagesDC M&T Lecture Notes - 0syulmnmd100% (1)
- EEC 213 TheoryDocument72 pagesEEC 213 TheoryOluwole KhennyNo ratings yet
- rr222104 Elctrical and Electronics EngineeringDocument8 pagesrr222104 Elctrical and Electronics EngineeringSRINIVASA RAO GANTANo ratings yet
- TND6041-D DC Motor Driver Fundamentals PDFDocument9 pagesTND6041-D DC Motor Driver Fundamentals PDFAlex CarmonaNo ratings yet
- Stepper motor guide: types, speed, applicationsDocument3 pagesStepper motor guide: types, speed, applicationsbibekananda sahooNo ratings yet
- 3 2 Selection of Generator and Excitation SystemDocument54 pages3 2 Selection of Generator and Excitation SystemSalih Ahmed ObeidNo ratings yet
- Note 8 Electric Actuators: Lecture Notes of ME 475: Introduction To MechatronicsDocument13 pagesNote 8 Electric Actuators: Lecture Notes of ME 475: Introduction To MechatronicsSapath Narsingh BogatiNo ratings yet
- Generation of High-Frequency Common Mode Currents in Machines of Inverter-Based Drive SystemsDocument10 pagesGeneration of High-Frequency Common Mode Currents in Machines of Inverter-Based Drive SystemsjunyeolNo ratings yet
- Simcenter Motorsolve ReportDocument15 pagesSimcenter Motorsolve ReportAimmadNo ratings yet