You might also like
- GS Inflation Implementation 10-20Document20 pagesGS Inflation Implementation 10-20bobmezzNo ratings yet
- Modern Approaches to Stochastic Volatility CalibrationDocument43 pagesModern Approaches to Stochastic Volatility Calibrationhsch345No ratings yet
- Geneva IntrotoBankDebt172Document66 pagesGeneva IntrotoBankDebt172satishlad1288No ratings yet
- Analytical Dynamics: Lagrange's Equation and Its Application - A Brief IntroductionDocument14 pagesAnalytical Dynamics: Lagrange's Equation and Its Application - A Brief IntroductionDan StuttsNo ratings yet
- 5 The HJM FrameworkDocument10 pages5 The HJM FrameworkGeorge LiuNo ratings yet
- Linear System TheoryDocument62 pagesLinear System TheoryadhomeworkNo ratings yet
- Unit Ia - State Space Modelling of SystemsDocument17 pagesUnit Ia - State Space Modelling of SystemsMuskan AgarwalNo ratings yet
- Learning from interest rate implied volatilitiesDocument85 pagesLearning from interest rate implied volatilitiesbobmezzNo ratings yet
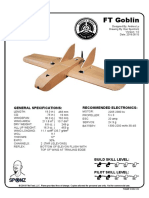
- FT Goblin Full SizeDocument7 pagesFT Goblin Full SizeDeakon Frost100% (1)
- The Zero-State Response Sums of InputsDocument4 pagesThe Zero-State Response Sums of Inputsbaruaeee100% (1)
- Real and Complex Analysis Solutions ManualDocument53 pagesReal and Complex Analysis Solutions Manualferney10100% (3)
- Inflatable Packers enDocument51 pagesInflatable Packers enDavid LuhetoNo ratings yet
- Welding MapDocument5 pagesWelding MapDjuangNo ratings yet
- 10 Greens FunctionDocument8 pages10 Greens FunctionDiego SilvaNo ratings yet
- 10 Greens FunctionDocument9 pages10 Greens FunctionAnonymous j6r5KRtrH2No ratings yet
- Mathematics: The Extremal Solution To Conformable Fractional Differential Equations Involving Integral Boundary ConditionDocument9 pagesMathematics: The Extremal Solution To Conformable Fractional Differential Equations Involving Integral Boundary ConditionHumairoh AnNo ratings yet
- New Method Estimates First-Order Plus Time Delay Model from Step ResponseDocument11 pagesNew Method Estimates First-Order Plus Time Delay Model from Step ResponseGetahun EsNo ratings yet
- Analytical Mechanics - Lagrange's Equation and Its ApplicationDocument14 pagesAnalytical Mechanics - Lagrange's Equation and Its Application'Nabeela MahmoodNo ratings yet
- Solving Differential Equations via Chebyshev Basis FunctionsDocument16 pagesSolving Differential Equations via Chebyshev Basis FunctionsAliyu AbdulqadirNo ratings yet
- Relating Egomotion and Image Evolution: Present Address: NEC Research Institute, 4 Independence Way, Princeton, NJ 08540Document10 pagesRelating Egomotion and Image Evolution: Present Address: NEC Research Institute, 4 Independence Way, Princeton, NJ 08540aquahibsNo ratings yet
- Fourier Analysis: Lucas Illing 2008Document21 pagesFourier Analysis: Lucas Illing 2008alnemangiNo ratings yet
- Dyson SeriesDocument25 pagesDyson SeriesNeymar MessiNo ratings yet
- Optimal Gradual Liquidation of Equity From A Risky Asset: Nikolai DokuchaevDocument8 pagesOptimal Gradual Liquidation of Equity From A Risky Asset: Nikolai DokuchaevndokuchNo ratings yet
- Lab Script Exp 3 (Fourier Synthesis)Document12 pagesLab Script Exp 3 (Fourier Synthesis)mouazam KhalidNo ratings yet
- AERO 4630: Structural Dynamics Homework 5: 1 Problem 1: Viscously Damped PendulumDocument5 pagesAERO 4630: Structural Dynamics Homework 5: 1 Problem 1: Viscously Damped PendulumMD GOLAM SARWARNo ratings yet
- Oscillatory Behavior of A Higher-Order Nonlinear Neutral Type Functional Di Erence Equation With Oscillating Coe CientsDocument8 pagesOscillatory Behavior of A Higher-Order Nonlinear Neutral Type Functional Di Erence Equation With Oscillating Coe CientsChecozNo ratings yet
- Continuous Time Fourier Transform CTFT 17 PDFDocument6 pagesContinuous Time Fourier Transform CTFT 17 PDFJaafar AbbakarNo ratings yet
- Methods for Constructing Yield CurvesDocument19 pagesMethods for Constructing Yield CurvessimonNo ratings yet
- Lecture Notes (Chapter 1) ASC2014 Life Contingencies IDocument28 pagesLecture Notes (Chapter 1) ASC2014 Life Contingencies Ijia yangNo ratings yet
- The Dirac Delta Function and ConvolutionDocument7 pagesThe Dirac Delta Function and Convolutionmodi_modusNo ratings yet
- If F (S) C (F (T) ), ThenDocument18 pagesIf F (S) C (F (T) ), ThenShubham Tribhuvan100% (1)
- Chap2 Signal AnalysisDocument20 pagesChap2 Signal AnalysisLaNitah LaNitahNo ratings yet
- Modeling in Time DomainDocument30 pagesModeling in Time Domainfarouq_razzaz2574No ratings yet
- RT ExercisesDocument220 pagesRT ExercisesJhonny tNo ratings yet
- Nonlinear differential equations bounded solutionsDocument11 pagesNonlinear differential equations bounded solutionsAsmaNo ratings yet
- F (T) 1 F (T)Document7 pagesF (T) 1 F (T)洪子翔No ratings yet
- 0054 Handout 5Document8 pages0054 Handout 5zcaptNo ratings yet
- تحليلات 1 2 3Document27 pagesتحليلات 1 2 3توحد الأديانNo ratings yet
- Homework 8: Ha Pham November 20, 2008Document5 pagesHomework 8: Ha Pham November 20, 2008Mainak SamantaNo ratings yet
- EE603 Class Notes John StensbyDocument34 pagesEE603 Class Notes John StensbyAman GuptaNo ratings yet
- Duhamel IntegralDocument11 pagesDuhamel IntegralSubham MukherjeeNo ratings yet
- Communication Systems: Fourier AnalysisDocument14 pagesCommunication Systems: Fourier AnalysisMubashir GhaffarNo ratings yet
- Convolution Topic and ExampleDocument13 pagesConvolution Topic and ExampleJaved IqbalNo ratings yet
- Periodic and Dirac Delta (1)Document8 pagesPeriodic and Dirac Delta (1)waalihabuxNo ratings yet
- Delta Function and So OnDocument20 pagesDelta Function and So OnLionel TopperNo ratings yet
- 4.1 Introduction To Angle ModulationDocument39 pages4.1 Introduction To Angle Modulation120200421003nNo ratings yet
- Linear ElasticDocument6 pagesLinear ElasticSarwo YustiansyahNo ratings yet
- The Volatility of Interest Rates and Forward Rates in The Hull-White ModelDocument11 pagesThe Volatility of Interest Rates and Forward Rates in The Hull-White Model楊約翰No ratings yet
- Fourier Series of Periodic Continuous-Time SignalsDocument15 pagesFourier Series of Periodic Continuous-Time Signalsprem chandranNo ratings yet
- Continuous Time Fourier Transform (CTFT) : Richard Baraniuk Melissa SelikDocument5 pagesContinuous Time Fourier Transform (CTFT) : Richard Baraniuk Melissa SelikPraveen KumarNo ratings yet
- Complex Fourie SeriesDocument3 pagesComplex Fourie SeriesAswath RangarajNo ratings yet
- SDEDocument64 pagesSDEAlexandru GavrilescuNo ratings yet
- Structural Dynamics & Earthquake EngineeringDocument8 pagesStructural Dynamics & Earthquake EngineeringHema Chandra Reddy KarimireddyNo ratings yet
- Which Derivative?: Manuel Ortigueira and José MachadoDocument13 pagesWhich Derivative?: Manuel Ortigueira and José Machadoanon_287903044No ratings yet
- !!en2 Discontinuity Functions v05Document3 pages!!en2 Discontinuity Functions v05Marcela DobreNo ratings yet
- Numerical Solution of Differential Equations I: Alberto Paganini April 19, 2018Document36 pagesNumerical Solution of Differential Equations I: Alberto Paganini April 19, 2018rinioririnNo ratings yet
- Picard's Theorem ExplainedDocument4 pagesPicard's Theorem ExplainedRapaza FotolicaNo ratings yet
- Blatt6 SolutionDocument11 pagesBlatt6 SolutionJulesNo ratings yet
- Time Evolution Operator as a Time-Ordered ExponentialDocument8 pagesTime Evolution Operator as a Time-Ordered ExponentialMonky PandaNo ratings yet
- Application_of_ZZ_Transform_Method_for_NDocument4 pagesApplication_of_ZZ_Transform_Method_for_NAdmasuNo ratings yet
- 221A Lecture Notes: Time-Dependent Perturbation Theory 1Document26 pages221A Lecture Notes: Time-Dependent Perturbation Theory 1Anshuman RawatNo ratings yet
- 27-05-2021-1622097292-6-IJGET-1. Dec - 2020-FOC - IJGET - Format-Relationship Between Shehu Transform With Some Other Integral TransformDocument10 pages27-05-2021-1622097292-6-IJGET-1. Dec - 2020-FOC - IJGET - Format-Relationship Between Shehu Transform With Some Other Integral Transformiaset123No ratings yet
- Numerical For Delay Fractional Differential EquationDocument10 pagesNumerical For Delay Fractional Differential Equationamit127bNo ratings yet
- Chapter 4Document26 pagesChapter 4jernejajNo ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- FX Talking: Some Stark DivergenceDocument15 pagesFX Talking: Some Stark DivergencebobmezzNo ratings yet
- Towards A Theory of Volatility Trading: Cambridge Books Online © Cambridge University Press, 2010Document19 pagesTowards A Theory of Volatility Trading: Cambridge Books Online © Cambridge University Press, 2010bobmezzNo ratings yet
- 1 Communication Classes and Irreducibility For Markov ChainsDocument8 pages1 Communication Classes and Irreducibility For Markov ChainsbobmezzNo ratings yet
- Applied Probability: Nathana El Berestycki, University of Cambridge Part II, Lent 2014Document32 pagesApplied Probability: Nathana El Berestycki, University of Cambridge Part II, Lent 2014bobmezzNo ratings yet
- A Tutorial On Principal Component AnalysisDocument12 pagesA Tutorial On Principal Component AnalysisCristóbal Alberto Campos MuñozNo ratings yet
- c1Document68 pagesc1dey_zicoNo ratings yet
- ING Think Rates Spark Shifting GroundsDocument6 pagesING Think Rates Spark Shifting GroundsbobmezzNo ratings yet
- The Convexity Maven: "Building A Better Volatility Mousetrap"Document13 pagesThe Convexity Maven: "Building A Better Volatility Mousetrap"bobmezzNo ratings yet
- 4703 07 Notes PP NSPPDocument9 pages4703 07 Notes PP NSPPМилан МишићNo ratings yet
- 1 Discrete-Time Markov ChainsDocument7 pages1 Discrete-Time Markov ChainsbobmezzNo ratings yet
- 1 IEOR 4701: Continuous-Time Markov ChainsDocument22 pages1 IEOR 4701: Continuous-Time Markov ChainsbobmezzNo ratings yet
- Transelliptical Component Analysis: Johns Hopkins University Princeton UniversityDocument26 pagesTranselliptical Component Analysis: Johns Hopkins University Princeton UniversitybobmezzNo ratings yet
- Pca Portfolio SelectionDocument18 pagesPca Portfolio Selectionluli_kbreraNo ratings yet
- Derivatives Across Asset ClassesDocument59 pagesDerivatives Across Asset ClassesbobmezzNo ratings yet
- A Tutorial On Principal Component AnalysisDocument12 pagesA Tutorial On Principal Component AnalysisCristóbal Alberto Campos MuñozNo ratings yet
- Siegel ParadoxDocument4 pagesSiegel ParadoxbobmezzNo ratings yet
- Statistical Properties of Forward Libor RatesDocument33 pagesStatistical Properties of Forward Libor RatesbobmezzNo ratings yet
- Common Statistical Tests Are Linear ModelsDocument1 pageCommon Statistical Tests Are Linear ModelsbobmezzNo ratings yet
- Market Volatility BulletinDocument28 pagesMarket Volatility BulletinbobmezzNo ratings yet
- Global Cycle Notes Hope Springs EternalDocument27 pagesGlobal Cycle Notes Hope Springs EternalbobmezzNo ratings yet
- FX Talking: Dovish Fed, Calm Seas - What Could Go Wrong?Document15 pagesFX Talking: Dovish Fed, Calm Seas - What Could Go Wrong?bobmezzNo ratings yet
- GARCH Models in Python 1Document31 pagesGARCH Models in Python 1visNo ratings yet
- Measuring cross-gamma riskDocument16 pagesMeasuring cross-gamma riskbobmezzNo ratings yet
- Global Markets Analyst - Top Ten Market Themes For 2021 - A Shot in The ArmDocument23 pagesGlobal Markets Analyst - Top Ten Market Themes For 2021 - A Shot in The ArmbobmezzNo ratings yet
- Berenberg Global ForecastsDocument15 pagesBerenberg Global ForecastsbobmezzNo ratings yet
- Gatheral 1Document18 pagesGatheral 1Zhenhuan Song100% (1)
- Elices - 2013 - Infoline - The Role of The Model Validation Function To Manage and Mitigate Model RiskDocument32 pagesElices - 2013 - Infoline - The Role of The Model Validation Function To Manage and Mitigate Model RiskbobmezzNo ratings yet
- Rate Curves For Forward Euribor Estimation and CSA-Discounting, AmetranoDocument94 pagesRate Curves For Forward Euribor Estimation and CSA-Discounting, AmetranosindhusrivastavaNo ratings yet
- An Overview of Tensorflow + Deep learning 沒一村Document31 pagesAn Overview of Tensorflow + Deep learning 沒一村Syed AdeelNo ratings yet
- Ten Golden Rules of LobbyingDocument1 pageTen Golden Rules of LobbyingChaibde DeNo ratings yet
- Growatt SPF3000TL-HVM (2020)Document2 pagesGrowatt SPF3000TL-HVM (2020)RUNARUNNo ratings yet
- Department of Labor: kwc25 (Rev-01-05)Document24 pagesDepartment of Labor: kwc25 (Rev-01-05)USA_DepartmentOfLaborNo ratings yet
- Chapter 1 Qus OnlyDocument28 pagesChapter 1 Qus OnlySaksharNo ratings yet
- Credentials List with Multiple Usernames, Passwords and Expiration DatesDocument1 pageCredentials List with Multiple Usernames, Passwords and Expiration DatesJOHN VEGANo ratings yet
- LPM 52 Compar Ref GuideDocument54 pagesLPM 52 Compar Ref GuideJimmy GilcesNo ratings yet
- 158 Oesmer Vs Paraisa DevDocument1 page158 Oesmer Vs Paraisa DevRobelle Rizon100% (1)
- Lista Precio Septiembre 0609Document75 pagesLista Precio Septiembre 0609gNo ratings yet
- Cars Should Be BannedDocument3 pagesCars Should Be BannedIrwanNo ratings yet
- Royal Enfield Market PositioningDocument7 pagesRoyal Enfield Market PositioningApoorv Agrawal67% (3)
- KSRTC BokingDocument2 pagesKSRTC BokingyogeshNo ratings yet
- The Value of Repeat Biopsy in SLEDocument8 pagesThe Value of Repeat Biopsy in SLESergio CerpaNo ratings yet
- Simplex Addressable Breakglass PDFDocument12 pagesSimplex Addressable Breakglass PDFNurrul Ahmad Hidayat100% (1)
- Oop Assignment # 2 Submitted By: Hashir Khan Roll #: 22f-7465 Date: 3-3-2023Document14 pagesOop Assignment # 2 Submitted By: Hashir Khan Roll #: 22f-7465 Date: 3-3-2023Hashir KhanNo ratings yet
- 1LE1503-2AA43-4AA4 Datasheet enDocument1 page1LE1503-2AA43-4AA4 Datasheet enAndrei LupuNo ratings yet
- CAP Regulation 20-1 - 05/29/2000Document47 pagesCAP Regulation 20-1 - 05/29/2000CAP History LibraryNo ratings yet
- Haryana Retial GarmentsDocument8 pagesHaryana Retial Garmentssudesh.samastNo ratings yet
- Terms and Condition PDFDocument2 pagesTerms and Condition PDFSeanmarie CabralesNo ratings yet
- ITS America's 2009 Annual Meeting & Exposition: Preliminary ProgramDocument36 pagesITS America's 2009 Annual Meeting & Exposition: Preliminary ProgramITS AmericaNo ratings yet
- Elaspeed Cold Shrink Splices 2010Document3 pagesElaspeed Cold Shrink Splices 2010moisesramosNo ratings yet
- Yi-Lai Berhad - COMPANY PROFILE - ProjectDocument4 pagesYi-Lai Berhad - COMPANY PROFILE - ProjectTerry ChongNo ratings yet
- SDNY - Girl Scouts V Boy Scouts ComplaintDocument50 pagesSDNY - Girl Scouts V Boy Scouts Complaintjan.wolfe5356No ratings yet
- E-TON - Vector ST 250Document87 pagesE-TON - Vector ST 250mariusgrosyNo ratings yet
- Bancassurance Black Book Rahul 777-2Document62 pagesBancassurance Black Book Rahul 777-2Shubham ShahNo ratings yet
- API MidtermDocument4 pagesAPI MidtermsimranNo ratings yet