You might also like
- SCORBOT-ER 9 High Performance RobotDocument2 pagesSCORBOT-ER 9 High Performance RobotCarlos Andres Moya ErazoNo ratings yet
- PF400 PDFDocument2 pagesPF400 PDFanupNo ratings yet
- World's First Collaborative SCARA Robot PF400Document2 pagesWorld's First Collaborative SCARA Robot PF400claudiu feierNo ratings yet
- Stepper Motor Basics: Applicationnote001Document13 pagesStepper Motor Basics: Applicationnote001shark seas100% (1)
- IRB-1410-PR10325EN - Rev.CDocument2 pagesIRB-1410-PR10325EN - Rev.CJehan AICNo ratings yet
- Liebherr LRB 125xl Piling and Drilling Rig Technical Data Spec Sheet Eng 10539140Document12 pagesLiebherr LRB 125xl Piling and Drilling Rig Technical Data Spec Sheet Eng 10539140Tomasz CzNo ratings yet
- Melfa ScaraDocument2 pagesMelfa ScaraSam WangNo ratings yet
- SCARA Robot Lab ManualDocument19 pagesSCARA Robot Lab ManualDaniaNo ratings yet
- An001 enDocument13 pagesAn001 enQuynh NguyenNo ratings yet
- Lexium Mdrive: LMD - P57 Pulse / Direction InputDocument5 pagesLexium Mdrive: LMD - P57 Pulse / Direction InputTăng TrườngNo ratings yet
- S141 Advanced DSP-based Servo Motion ControllerDocument8 pagesS141 Advanced DSP-based Servo Motion ControllersharkeraNo ratings yet
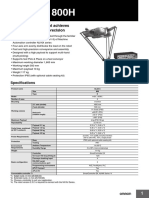
- Parallel Robot Quattro 800H Achieves High Speed PrecisionDocument2 pagesParallel Robot Quattro 800H Achieves High Speed PrecisionjorgemantillaNo ratings yet
- #1 ARacer RC Super X IntroductionDocument63 pages#1 ARacer RC Super X Introductionmida0114100% (1)
- Heading Motion Sensor Intelligent Gyro Compass IgcDocument2 pagesHeading Motion Sensor Intelligent Gyro Compass IgcjaliltaghdarehNo ratings yet
- US200 EnglishDocument28 pagesUS200 EnglishMoogii MonhNo ratings yet
- Active Suspension System: Shri Ramdeobaba College of Engineering and ManagementDocument76 pagesActive Suspension System: Shri Ramdeobaba College of Engineering and Managementsangeet khuleNo ratings yet
- E20001-A380-P670-V3-7600 (V90 - New 2017 - Leaflet)Document2 pagesE20001-A380-P670-V3-7600 (V90 - New 2017 - Leaflet)Dennis Koay GMNo ratings yet
- BE Brochure LinearPositioning SBL-LBL 2022update v1-5 ForWeb SMDocument22 pagesBE Brochure LinearPositioning SBL-LBL 2022update v1-5 ForWeb SMBandi VelmimnohoNo ratings yet
- Antena DSNG AVL Switch'sDocument21 pagesAntena DSNG AVL Switch'sRicardo MarquesNo ratings yet
- Ds Ihss86enDocument5 pagesDs Ihss86enRicardo G. MartinezNo ratings yet
- Manual ShortDocument2 pagesManual ShortViktor SokolovNo ratings yet
- Agitador Reciproco DaihanDocument1 pageAgitador Reciproco DaihanCristian SamboniNo ratings yet
- Grove Yb 5515-2Document32 pagesGrove Yb 5515-2Frank William Romero OrjuelaNo ratings yet
- Dyadic Systems CatalogDocument14 pagesDyadic Systems CatalogJuan Francisco Sanchez MassadiNo ratings yet
- SFDEN 006 008 - FD11controller PDFDocument22 pagesSFDEN 006 008 - FD11controller PDFkhophimhdNo ratings yet
- GMK 4100B PDFDocument24 pagesGMK 4100B PDFLetácio OliveiraNo ratings yet
- Aparato de Sonda para Medir PDFDocument13 pagesAparato de Sonda para Medir PDFmarcosNo ratings yet
- Catalogue 2018 ANGDocument16 pagesCatalogue 2018 ANGCRNo ratings yet
- TMX R: Designed To Make A DifferenceDocument4 pagesTMX R: Designed To Make A Differencenifaldi88No ratings yet
- YB5515 2 Product Guide ComboDocument32 pagesYB5515 2 Product Guide ComboJonath LanceNo ratings yet
- Product Guide: FeaturesDocument24 pagesProduct Guide: FeaturesHoward HoacNo ratings yet
- HCRrobot Leaflet EN 1005Document2 pagesHCRrobot Leaflet EN 1005Amilcar CoutoNo ratings yet
- X3-Brochure 1 (9-17) - 1 - CompressedDocument4 pagesX3-Brochure 1 (9-17) - 1 - CompressedAlrich BalanayNo ratings yet
- Charmec LC 605 D (V) : Technical Data Sheet 100064402 23.06.2014 AustraliaDocument8 pagesCharmec LC 605 D (V) : Technical Data Sheet 100064402 23.06.2014 Australiajuan eduardo rodriguezNo ratings yet
- A Meh392aDocument32 pagesA Meh392agsNo ratings yet
- ATLAS 7R DatasheetDocument4 pagesATLAS 7R Datasheetarmin_kunosic9871No ratings yet
- C InstalDocument170 pagesC InstalklemencicvinkoNo ratings yet
- Small Engine Control Module: ApplicationsDocument2 pagesSmall Engine Control Module: ApplicationsdavonesNo ratings yet
- C LangDocument340 pagesC LangklemencicvinkoNo ratings yet
- Conan Manipulator CutsheetDocument5 pagesConan Manipulator CutsheetRafael.AugustinisNo ratings yet
- GSK980MDc CNC Fresado MillingDocument7 pagesGSK980MDc CNC Fresado MillingAdrian Quintero RamirezNo ratings yet
- 01 Manual de Mantenimiento Del RobotDocument10 pages01 Manual de Mantenimiento Del RobotCarlos Eduardo Segura VillarrealNo ratings yet
- Proact PDFDocument4 pagesProact PDFnitin kumarNo ratings yet
- RoBoard RS 1270Document10 pagesRoBoard RS 1270Eng-Mohammad Hassan Al-assadyNo ratings yet
- Fast, Compact and Versatile Industrial RobotDocument2 pagesFast, Compact and Versatile Industrial RobotAlexandru ZdbNo ratings yet
- Strategi AutomationDocument1 pageStrategi AutomationachillestrojanNo ratings yet
- Small, Powerful, and Fast 6-Axes RobotDocument2 pagesSmall, Powerful, and Fast 6-Axes RobotVijay GadakhNo ratings yet
- NEWKer CNC CatalogDocument21 pagesNEWKer CNC Catalogyaminis61No ratings yet
- Broschüre Standard22 Gyro Compass Retrofit SolutionDocument4 pagesBroschüre Standard22 Gyro Compass Retrofit SolutionTegoeh ANo ratings yet
- Wdm Lab Pe Aristo RobotDocument8 pagesWdm Lab Pe Aristo Robotfkmal28569No ratings yet
- HA006 EskiDocument4 pagesHA006 EskiBerkay GültekinNo ratings yet
- CyscanDocument1 pageCyscanRuslan SamokhinNo ratings yet
- Integrated Closed Loop Stepper Motor Datasheet Rev 5.2Document5 pagesIntegrated Closed Loop Stepper Motor Datasheet Rev 5.2Taufik Iqbal WibowoNo ratings yet
- Specs For RobotDocument1 pageSpecs For RobotAjay SuryavanshiNo ratings yet
- C ElectDocument469 pagesC ElectklemencicvinkoNo ratings yet
- Robotic LabDocument20 pagesRobotic Lab037 Amit SemwalNo ratings yet
- Easy-to-Teach and Easy-to-Operate Arc Welding Robot-Satisfies User's Needs For Saving Space and High ProductivityDocument2 pagesEasy-to-Teach and Easy-to-Operate Arc Welding Robot-Satisfies User's Needs For Saving Space and High Productivityanh thoNo ratings yet
- High Performance Vertical Machining CentreDocument8 pagesHigh Performance Vertical Machining CentrejorgetalaveraNo ratings yet
- 8051 Microcontroller: An Applications Based IntroductionFrom Everand8051 Microcontroller: An Applications Based IntroductionRating: 5 out of 5 stars5/5 (6)
- Your Registration ID: V11885019ABLSI4J Your Key: 79FEF4CC-BDEE3B15-10D4B6A9-CF41EEAF-AADDEE27-80268C66-23839313Document1 pageYour Registration ID: V11885019ABLSI4J Your Key: 79FEF4CC-BDEE3B15-10D4B6A9-CF41EEAF-AADDEE27-80268C66-23839313sebastian_alvarez_7No ratings yet
- Prestige 6000 UPSDocument92 pagesPrestige 6000 UPSsebastian_alvarez_7No ratings yet
- ProvincialDocument1 pageProvincialsebastian_alvarez_7No ratings yet
- EDUFINDME SebastianDocument1 pageEDUFINDME Sebastiansebastian_alvarez_7No ratings yet
- ReadmeDocument7 pagesReadmeRobert SirbuNo ratings yet
- Đề Minh Họa 2020 Số 23 - GV Trang Anh - Moon.vnDocument22 pagesĐề Minh Họa 2020 Số 23 - GV Trang Anh - Moon.vnLily LeeNo ratings yet
- Cropprotectionequipment-Rocker Sprayer - Specification (: Indian StandardDocument9 pagesCropprotectionequipment-Rocker Sprayer - Specification (: Indian Standardgini associatesNo ratings yet
- Sigmund Freud and His Main TheoriesDocument5 pagesSigmund Freud and His Main TheoriesNguyen HarryNo ratings yet
- Marketing Assignment (Cool Air India)Document10 pagesMarketing Assignment (Cool Air India)Mandira PantNo ratings yet
- Tiger AnddragonDocument61 pagesTiger AnddragonAdil SiddiquiNo ratings yet
- RMC Case StudyDocument2 pagesRMC Case StudyAmer RahmahNo ratings yet
- Shadow The Hedgehog (Sonic Boom)Document11 pagesShadow The Hedgehog (Sonic Boom)Tamajong Tamajong PhilipNo ratings yet
- Sculptures by The SeaDocument1 pageSculptures by The Seaapi-457802597No ratings yet
- Curriculum Vitae: Name: Mobile: EmailDocument3 pagesCurriculum Vitae: Name: Mobile: EmailRākesh RakhiNo ratings yet
- Chem 361 Separation Methods IntroDocument8 pagesChem 361 Separation Methods IntroTwum SomoahNo ratings yet
- Bicycle Repair ManualDocument162 pagesBicycle Repair Manualrazvancc89% (9)
- Journal of Travel & Tourism MarketingDocument19 pagesJournal of Travel & Tourism MarketingSilky GaurNo ratings yet
- Chapter 1 Optical Fiber Transmission Media PDFDocument46 pagesChapter 1 Optical Fiber Transmission Media PDFGilang AnandaNo ratings yet
- Enabling Keycloak Metrics - KeycloakDocument3 pagesEnabling Keycloak Metrics - Keycloakhisyam darwisNo ratings yet
- Grupo Stoncor Description - Stonhard Carboline Fibergrate PDFDocument22 pagesGrupo Stoncor Description - Stonhard Carboline Fibergrate PDFAndres OsorioNo ratings yet
- DMS 48 NormesDocument11 pagesDMS 48 NormesSonia WittmannNo ratings yet
- Carbon SteelDocument1 pageCarbon SteeldexterNo ratings yet
- 1.1 Thermodynamics 1Document28 pages1.1 Thermodynamics 1Lyan SantosNo ratings yet
- Listening Script 11Document11 pagesListening Script 11harshkumarbhallaNo ratings yet
- Kompres Panas Dingin Dapat Mengurangi Nyeri Kala I Persalinan Di Rumah Sakit Pertamina Bintang AminDocument9 pagesKompres Panas Dingin Dapat Mengurangi Nyeri Kala I Persalinan Di Rumah Sakit Pertamina Bintang AminHendrayana RamdanNo ratings yet
- Physical Layer:: SwitchingDocument27 pagesPhysical Layer:: SwitchingPKSachanNo ratings yet
- Computer Vision: Chapter 5. SegmentationDocument16 pagesComputer Vision: Chapter 5. SegmentationThịi ÁnhhNo ratings yet
- Mineral Processing Course: ThickeningDocument50 pagesMineral Processing Course: ThickeningAdham Elbrawy100% (1)
- CH - 1Document4 pagesCH - 1Phantom GamingNo ratings yet
- A Study On Financial Performance of Small and MediumDocument9 pagesA Study On Financial Performance of Small and Mediumtakele petrosNo ratings yet
- Module II Lecture 4Document19 pagesModule II Lecture 4Prateek NayakNo ratings yet
- Revision Module 1,2,3Document129 pagesRevision Module 1,2,3jitamitra88No ratings yet
- Sist-En-6101-2016 .Document9 pagesSist-En-6101-2016 .lokelooksNo ratings yet
- The Chair As Health Hazard Part II J of PDFDocument11 pagesThe Chair As Health Hazard Part II J of PDFPablo BuniakNo ratings yet
- Table of Material Properties For Structural Steel S235, S275, S355, S420Document4 pagesTable of Material Properties For Structural Steel S235, S275, S355, S420Mouhssine BrahmiaNo ratings yet