Professional Documents
Culture Documents
الحساب المثلثي1
Uploaded by
cherazerCopyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
الحساب المثلثي1
Uploaded by
cherazerCopyright:
Available Formats
اﻟﺤﺴﺎب اﻟﻤﺜﻠﺜﻲ – اﻟﺠﺰء1
اﻟﻘﺪرات اﻟﻤﻨﺘﻈﺮة
اﻟﺪورة اﻷوﻟﻰ * -اﺳﺘﻌﻤﺎل اﻟﻤﺤﺴﺒﺔ اﻟﻌﻠﻤﻴﺔ ﻟﺘﺤﺪﻳﺪ ﻗﻴﻤﺔ ﻣﻘﺮﺑﺔ ازاوﻳﺔ ﻣﺤﺪدة ﺑﺄﺣﺪ ﻧﺴﺒﻬﺎ
15ﺳﺎﻋﺔ اﻟﻤﺜﻠﺜﻴﺔ واﻟﻌﻜﺲ.
* -اﻟﺘﻤﻜﻦ ﻣﻦ اﻟﻨﺴﺐ اﻟﻤﺜﻠﺜﻴﺔ ﻟﻠﺰواﻳﺎ اﻻﻋﺘﻴﺎدﻳﺔ وﺗﻄﺒﻴﻖ ﻣﺨﺘﻠﻒ اﻟﻌﻼﻗﺎت
-Iﺗﺬآﻴﺮ و اﺿﺎﻓﺎت
-1أﻧﺸﻄﺔ ﻟﻠﺘﺬآﻴﺮ
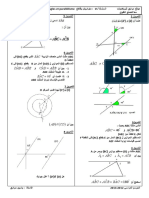
ﺗﻤﺮﻳﻦ1
ﻧﻌﺘﺒﺮ اﻟﺸﻜﻞ اﻟﺘﺎﻟﻲ ﺣﻴﺚ OA = 4و AB = 3و H
اﻟﻤﺴﻘﻂ اﻟﻌﻤﻮدي ﻟـ Aﻋﻠﻰ ) : ( OB
-1أﺣﺴﺐ OB
n
(
-2أ /أﺣﺴﺐ cos AOBﺛﻢ اﺳﺘﻨﺘﺞ ﻗﻴﻤﺔ ﻣﻘﺮﺑﺔ )
nﻟﻘﻴﺎس اﻟﺰاوﻳﺔ AOB
ب /اﺳﺘﻨﺘﺞ اﻟﻤﺴﺎﻓﺔ OH
(
sin n )
tan nﺛﻢ اﺳﺘﻨﺘﺞ AOB
-3أﺣﺴﺐ AOB( )
ﺗﻤﺮﻳﻦ2
ﻧﻌﺘﺒﺮ اﻟﺸﻜﻞ اﻟﺘﺎﻟﻲ ﺑﺤﻴﺚ AB = 5و EF = 4
B
A
O
E F
sin n ( )
cos nﺛﻢ اﺳﺘﻨﺘﺞ AOE
أﺣﺴﺐ AOE ( )
-1وﺣﺪات ﻗﻴﺎس اﻟﺰواﻳﺎ و اﻻﻗﻮاس اﻟﻬﻨﺪﺳﻴﺔ – زاوﻳﺔ ﻣﺮآﺰﻳﺔ
-1أﻧﺸﻄﺔ
ﻟﺘﻜﻦ ) ( Cداﺋﺮة ﻣﺮآﺰهﺎ Oو ﺷﻌﺎﻋﻬﺎ . Rﻧﻌﺘﺒﺮ Aو Bو C
ﺑﺤﻴﺚ αﻗﻴﺎس ﻟﻠﺰاوﻳﺔ اﻟﻬﻨﺪﺳﻴﺔ ) (C و ' Aو ' Bو Mﻧﻘﻂ ﻣﻦ
nﺑﺎﻟﺪرﺟﺔ
AOM
-1اﺗﻤﻢ اﻟﺠﺪول اﻟﺘﺎﻟﻲ
n ∨ n n n
AOM AOB ' AOC AOB AOA ' اﻟﺰاوﻳﺔ اﻟﻤﺮآﺰﻳﺔ
α° ﻗﻴﺎس اﻟﺰاوﻳﺔ اﻟﻤﺮآﺰﻳﺔ ﺑﺎﻟﺪرﺟﺔ
ﻃﻮل اﻟﻘﻮس اﻟﻬﻨﺪﺳﻴﺔ اﻟﻤﺮﺗﺒﻄﺔ
l
ﺑﻬﺎ
3π 3π π
ﻋﻠﻰ اﻟﺘﻮاﻟﻲ و R -2ﺑﻴﻦ أن 180°و 90°و 135°و 270°ﻣﺘﻨﺎﺳﺒﺔ π Rو Rو R
2 4 2
-3ﺣﺪد lﺑﺪﻻﻟﺔ αو πو R
-4ﻟﺘﻜﻦ ' Mﻧﻘﻄﺔ ﻣﻦ ) ( Cﺣﻴﺚ ﻃﻮل اﻟﻘﻮس اﻟﻬﻨﺪﺳﻴﺔ ]' [ AMهﻮ . R
http://arabmaths.ift.fr 1 Moustaouli Mohamed
nﺑﺎﻟﺪرﺟﺔ.
ﺣﺪد βﻗﻴﺎس اﻟﺰاوﻳﺔ اﻟﻤﺮآﺰﻳﺔ AOM '
-2وﺣﺪات ﻗﻴﺎس اﻟﺰواﻳﺎ
ﻟﻘﻴﺎس اﻟﺰواﻳﺎ هﻨﺎك ﺛﻼث وﺣﺪات هﻲ اﻟﺪرﺟﺔ و اﻟﻐﺮاد و اﻟﺮادﻳﺎن.
أ /ﺗﻌﺮﻳﻒ اﻟﺮادﻳﺎن
اﻟﺮادﻳﺎن هﻮ ﻗﻴﺎس زاوﻳﺔ ﻣﺮآﺰﻳﺔ ،ﻓﻲ داﺋﺮة ﺷﻌﺎﻋﻬﺎ ، Rﺗﺤﺼﺮ ﻗﻮﺳﺎ داﺋﺮﻳﺔ ﻃﻮﻟﻬﺎ . R
ﻧﺮﻣﺰ ﻟﻬﺎ ﺑـ rdأو rad
: gr ) π rd = 200 gr = 180Dﻳﺮﻣﺰ ﻟﻠﻐﺮاد( ﻣﻼﺣﻈﺔ
ب /ﻧﺘﻴﺠﺔ
x y z
= = إذا آﺎن xﻗﻴﺎس زاوﻳﺔ ﺑﺎﻟﺮادﻳﺎن و yﻗﻴﺎﺳﻬﺎ ﺑﺎﻟﺪرﺟﺔ و zﻗﻴﺎﺳﻬﺎ ﺑﺎﻟﻐﺮاد ﻓﺎن
π 180 200
ج /ﻗﻴﺎس ﻗﻮس هﻨﺪﺳﻴﺔ ﻗﻴﺎس ﻗﻮس هﻨﺪﺳﻴﺔ هﻮ ﻗﻴﺎس اﻟﺰاوﻳﺔ اﻟﻤﺮآﺰﻳﺔ اﻟﺘﻲ ﺗﺤﺼﺮﻩ.
د /ﻃﻮل ﻗﻮس هﻨﺪﺳﻴﺔ
إذا آﺎن αﻗﻴﺎس ﻗﻮس هﻨﺪﺳﻴﺔ ﺑﺎﻟﺮادﻳﺎن ،ﻓﻲ داﺋﺮة ﺷﻌﺎﻋﻬﺎ ، Rﻓﺎن ﻃﻮل هﺬﻩ اﻟﻘﻮس هﻮ . α R
ﻣﻼﺣﻈﺔ
ﻃﻮل ﻗﻮس هﻨﺪﺳﻴﺔ ،ﻓﻲ داﺋﺮة ﺷﻌﺎﻋﻬﺎ 1هﻮ ﻗﻴﺎس اﻟﺰاوﻳﺔ اﻟﻤﺮآﺰﻳﺔ اﻟﺘﻲ ﺗﺤﺼﺮهﺎ.
ﺗﻤﺎرﻳﻦ ﺗﻄﺒﻴﻘﻴﺔ
ﺗﻤﺮﻳﻦ1
اﺗﻤﻢ اﻟﺠﺪول اﻟﺘﺎﻟﻲ
0° 30° 45° 90° ﻗﻴﺎس زاوﻳﺔ ﺑﺎﻟﺪرﺟﺔ
π
ﻗﻴﺎﺳﻬﺎ ﺑﺎﻟﺮادﻳﺎن
3
ﺗﻤﺮﻳﻦ2
ﻟﻴﻜﻦ ABCﻣﺜﻠﺜﺎ ﻣﺘﺴﺎوي اﻻﺿﻼع ﺣﻴﺚ AB = 5cmو ﻧﻌﺘﺒﺮ ) ( Cاﻟﺪاﺋﺮة اﻟﺘﻲ ﻣﺮآﺰﻩ Aو ﺗﻤﺮ
أﺣﺴﺐ lﻃﻮل اﻟﻘﻮس اﻟﻬﻨﺪﺳﻴﺔ اﻟﻤﺤﺼﻮرة ﺑﺎﻟﺰاوﻳﺔ اﻟﻤﺮآﺰﻳﺔ n
BAC ﻣﻦ . B
-IIاﻟﺪاﺋﺮة اﻟﻤﺜﻠﺜﻴﺔ
-1ﺗﻮﺟﻴﻪ داﺋﺮة -ﺗﻮﺟﻴﻪ ﻣﺴﺘﻮى
+ ﻟﺘﻜﻦ ) (Cداﺋﺮة ﻣﺮآﺰهﺎ Oو ﺷﻌﺎﻋﻬﺎ Rو Iﻧﻘﻄﺔ ﻣﻦ ) . (C
ﻟﻮ أردﻧﺎ أن ﻧﻨﻄﻠﻖ ﻣﻦ Iﻟﻨﺪور ﺣﻮل ) ، (Cﻟﻮﺟﺪﻧﺎ أﻧﻔﺴﻨﺎ أﻣﺎم ﻣﻨﺤﻴﻴﻦ .
ﺗﻮﺟﻴﻪ اﻟﺪاﺋﺮة ) (Cهﻮ اﺧﺘﻴﺎر أﺣﺪ اﻟﻤﻨﺤﻴﻴﻦ ﻣﻨﺤﻰ ﻣﻮﺟﺒﺎ ) أو ﻣﺒﺎﺷﺮا(
و اﻵﺧﺮ ﻣﻨﺤﻰ ﺳﺎﻟﺒﺎ ) أو ﻏﻴﺮ ﻣﺒﺎﺷﺮ(.
ﻋﺎدة ﻧﺄﺧﺬ اﻟﻤﻨﺤﻰ اﻟﻤﻮﺟﺐ اﻟﻤﻨﺤﻰ اﻟﻤﻌﺎآﺲ ﻟﺤﺮآﺔ ﻋﻘﺎرب اﻟﺴﺎﻋﺔ .
اﻟﻨﻘﻄﺔ Iﺗﺴﻤﻰ أﺻﻞ اﻟﺪاﺋﺮة ) . (C
ﻋﻨﺪﻣﺎ ﺗﻮﺟﻪ ﺟﻤﻴﻊ دواﺋﺮ اﻟﻤﺴﺘﻮى ﺗﻮﺟﻴﻬﺎ ﻣﻮﺣﺪا ﻓﺈﻧﻨﺎ ﻧﻘﻮل إن اﻟﻤﺴﺘﻮى ﻣﻮﺟﻪ.
-2اﻟﺪاﺋﺮة اﻟﻤﺜﻠﺜﻴﺔ
ﺗﻌﺮﻳﻒ اﻟﺪاﺋﺮة اﻟﻤﺜﻠﺜﻴﺔ هﻲ داﺋﺮة ﺷﻌﺎﻋﻬﺎ 1ﻣﺰودة ﺑﻨﻘﻄﺔ أﺻﻞ و ﻣﻮﺟﻬﺔ ﺗﻮﺟﻴﻬﺎ ﻣﻮﺟﺒﺎ.
+
O 1 I
–IIIاﻷﻓﺎﺻﻴﻞ اﻟﻤﻨﺤﻨﻴﺔ.
-1اﻷﻓﺼﻮل اﻟﻤﻨﺤﻨﻲ اﻟﺮﺋﻴﺴﻲ ﻟﻨﻘﻄﺔ ﻋﻠﻰ اﻟﺪاﺋﺮة اﻟﻤﺜﻠﺜﻴﺔ
ﻟﺘﻜﻦ ) (Cداﺋﺮة ﻣﺜﻠﺜﻴﺔ أﺻﻠﻬﺎ . Iﻧﻌﺘﺒﺮ اﻟﻤﺠﺎل ] ]−π ; πﺣﻴﺚ 0أﻓﺼﻮل Iﻓﻲ اﻟﻤﺤﻮر اﻟﻌﻤﻮدي
ﻋﻠﻰ ) . ( OIﺣﺪد ﻣﺤﻴﻂ اﻟﺪاﺋﺮة وﺷﻌﺎع اﻟﺪاﺋﺮة.
إذا ﻟﻔﻔﻨﺎ اﻟﻘﻄﻌﺔ اﻟﻤﻤﺜﻠﺔ ﻟﻠﻤﺠﺎل ] ]−π ; πﻋﻠﻰ اﻟﺪاﺋﺮة ) (Cﻧﻼﺣﻆ أن آﻞ ﻋﺪد αﻣﻦ ] ]−π ; πﻳﻨﻄﺒﻖ
αﻣﻦ ] ]−π ; π ﻣﻊ ﻧﻘﻄﺔ وﺣﻴﺪة Mﻣﻦ ) (Cو آﻞ ﻧﻘﻄﺔ Mﻣﻦ ) (Cﺗﻤﺜﻞ ﻋﺪد وﺣﻴﺪ
http://arabmaths.ift.fr 2 Moustaouli Mohamed
اﻟﻌﺪد αﻳﺴﻤﻰ اﻻﻓﺼﻮل اﻟﻤﻨﺤﻨﻲ اﻟﺮﺋﻴﺴﻲ ﻟـ M
ﺧﺎﺻﻴﺔ و ﺗﻌﺮﻳﻒ
ﻟﺘﻜﻦ ) (Cداﺋﺮة ﻣﺜﻠﺜﻴﺔ أﺻﻠﻬﺎ . I
آﻞ ﻧﻘﻄﺔ Mﻣﻦ ) (Cﺗﻤﺜﻞ ﻋﺪد وﺣﻴﺪ αﻣﻦ ] ]−π ; πو آﻞ
Mﻣﻦ ) . (C ﻋﺪد αﻣﻦ ] ]−π ; πﻳﻤﺜﻞ ﻧﻘﻄﺔ وﺣﻴﺪة
اﻟﻌﺪد αﻳﺴﻤﻰ اﻻﻓﺼﻮل اﻟﻤﻨﺤﻨﻲ اﻟﺮﺋﻴﺴﻲ ﻟـ M
ﻗﻴﺎس اﻟﺰاوﻳﺔ اﻟﻬﻨﺪﺳﻴﺔ n
IOMهﻮ αرادﻳﺎن ﻣﻼﺣﻈﺔ
ﺗﻤﺮﻳﻦ1
) (Cأﺻﻠﻬﺎ . Iأﻧﺸﺊ اﻟﻨﻘﻂ Aو Bو Cو ﻋﻠﻰ داﺋﺮة ﻣﺜﻠﺜﻴﺔ
π π
و و Dو Eو Fو Gو Hاﻟﺘﻲ اﻓﺎﺻﻴﻠﻬﺎ اﻟﻤﻨﺤﻨﻴﺔ اﻟﺮﺋﻴﺴﻴﺔ هﻲ
4 6
3π π π π 3π π
−ﻋﻠﻰ اﻟﺘﻮاﻟﻲ و −و −و −و و
4 3 4 6 4 3
ﺗﻤﺮﻳﻦ2
) (Cداﺋﺮة ﻣﺜﻠﺜﻴﺔ أﺻﻠﻬﺎ . Iﺣﺪد اﻷﻓﺎﺻﻴﻞ اﻟﻤﻨﺤﻨﻴﺔ اﻟﺮﺋﻴﺴﻴﺔ
ﻟﻠﻨﻘﻂ B; A';A; J'; J; I';Iاﻟﻤﻤﺜﻠﺔ ﻓﻲ اﻟﺸﻜﻞ آﻤﺎ ﻳﻠﻲ
-2اﻷﻓﺎﺻﻴﻞ اﻟﻤﻨﺤﻨﻴﺔ ﻟﻨﻘﻄﺔ ﻋﻠﻰ اﻟﺪاﺋﺮة اﻟﻤﺜﻠﺜﻴﺔ
ﻧﻌﺘﺒﺮ ) (Cداﺋﺮة ﻣﺜﻠﺜﻴﺔ أﺻﻠﻬﺎ . Iﻧﻌﺘﺒﺮ اﻟﻤﺤﻮر ) ( ∆ ) = D ( I , E
ﺣﻴﺚ ) ∆ ( ⊥ ) . ( OI
ﻟﺘﻜﻦ ﻧﻘﻄﺔ Mﻣﻦ ) (Cأﻓﺼﻮﻟﻬﺎ اﻟﻤﻨﺤﻨﻲ اﻟﺮﺋﻴﺴﻲ . α
ﻟﻨﺤﺪد آﻞ اﻷﻋﺪاد اﻟﺘﻲ ﺗﻨﻄﺒﻖ ﻣﻊ Mاذا ﻟﻔﻔﻨﺎ اﻟﻤﺴﺘﻘﻴﻢ اﻟﻌﺪدي
ﻋﻠﻰ ) (C
ﻧﻼﺣﻆ اﻧﻨﺎ اذا ﻟﻔﻔﻨﺎ اﻟﻤﺴﺘﻘﻴﻢ اﻟﻌﺪدي اﻟﻤﻤﺜﻞ ﻟـ \ ﻋﻠﻰ ) (Cاﻟﻨﻘﻄﺔ M
ﺗﻨﻄﺒﻖ ﻣﻊ اﻷﻋﺪاد
........... α − 4π ; α − 2π ; α ; α + 2π ; α + 4π ..............
آﻞ هﺬﻩ اﻷﻋﺪاد ﺗﺴﻤﻰ اﻷﻓﺎﺻﻴﻞ اﻟﻤﻨﺤﻨﻴﺔ ﻟﻨﻘﻄﺔ M
ﻧﻼﺣﻆ أن هﺬﻩ اﻷﻋﺪاد ﺗﻜﺘﺐ ﺑﺸﻜﻞ ﻋﺎم ﻋﻞ ﺷﻜﻞ α + 2k πﺣﻴﺚ ] ∈ k
ﺗﻌﺮﻳﻒ
ﻟﺘﻜﻦ Mﻧﻘﻄﺔ ﻣﻦ داﺋﺮة ﻣﺜﻠﺜﻴﺔ ) (Cأﺻﻠﻬﺎ .Iو ﻟﻴﻜﻦ α
أﻓﺼﻮﻟﻬﺎ اﻟﻤﻨﺤﻨﻲ اﻟﺮﺋﻴﺴﻲ
آﻞ ﻋﺪد ﻳﻜﺘﺐ ﻋﻠﻰ اﻟﺸﻜﻞ α + 2k πﺑﺤﻴﺚ kﻋﻨﺼﺮ ﻣﻦ ]
ﻳﺴﻤﻰ أﻓﺼﻮﻻ ﻣﻨﺤﻨﻴﺎ ﻟﻠﻨﻘﻄﺔ .M
http://arabmaths.ift.fr 3 Moustaouli Mohamed
2π π
− و ﺣﺪد اﻷﻓﺎﺻﻴﻞ اﻟﻤﻨﺤﻨﻴﺔ ﻟﻠﻨﻘﻄﺘﻴﻦ Aو Bذات اﻻﻓﺼﻮﻟﻴﻦ اﻟﻤﻨﺤﻨﻴﻴﻦ اﻟﺮﺋﻴﺴﻴﻴﻦ ﺗﻤﺮﻳﻦ
3 5
ﻋﻠﻰ اﻟﺘﻮاﻟﻲ
ﺗﻤﺮﻳﻦ ) (Cداﺋﺮة ﻣﺜﻠﺜﻴﺔ أﺻﻠﻬﺎ . I
34π
أﻓﺼﻮل ﻣﻨﺤﻨﻲ ﻟﻨﻘﻄﺔ . Mأﻧﺸﺊ M ﻧﻌﺘﺒﺮ
3
ب -ﺧﺎﺻﻴﺎت
) (Cأﺻﻠﻬﺎ .Iو ﻟﻴﻜﻦ αأﻓﺼﻮﻟﻬﺎ اﻟﻤﻨﺤﻨﻲ اﻟﺮﺋﻴﺴﻲ ﻟﺘﻜﻦ Mﻧﻘﻄﺔ ﻣﻦ داﺋﺮة ﻣﺜﻠﺜﻴﺔ
ﺑﻴﻦ اذا آﺎن xو yأﻓﺼﻮﻟﻴﻦ ﻣﻨﺤﻨﻴﻴﻦ ﻟﻠﻨﻘﻄﺔ Mﻓﺎﻧﻪ ﻳﻮﺟﺪ ﻋﻨﺼﺮ λﻣﻦ ] ﺑﺤﻴﺚ x − y = 2λπ
ﺧﺎﺻﻴﺔ -إذا آﺎن xو yأﻓﺼﻮﻟﻴﻦ ﻣﻨﺤﻨﻴﻴﻦ ﻟﻠﻨﻘﻄﺔ Mﻓﺎﻧﻪ ﻳﻮﺟﺪ ﻋﻨﺼﺮ λﻣﻦ ] ﺑﺤﻴﺚ x − y = 2λπ
و ﻧﻜﺘﺐ ] x ≡ y [ 2πو ﻧﻘﺮأ xﻳﺴﺎوي yﺑﺘﺮدﻳﺪ . 2π
-إذا آﺎن xأﻓﺼﻮل ﻣﻨﺤﻨﻲ ﻟﻠﻨﻘﻄﺔ Mﻓﺎن ﺟﻤﻴﻊ اﻷﻓﺎﺻﻴﻞ اﻟﻤﻨﺤﻨﻴﺔ ﻟﻠﻨﻘﻄﺔ Mﺗﻜﺘﺐ ﻋﻠﻰ ﺷﻜﻞ
x + 2k πﺣﻴﺚ ] ∈ . k
−227π
=α ﺗﻤﺮﻳﻦ ﺣﺪد اﻷﻓﺼﻮل اﻟﻤﻨﺤﻨﻲ اﻟﺮﺋﻴﺴﻲ ﻟﻠﻨﻘﻄﺔ اﻟﺘﻲ إﺣﺪى أﻓﺎﺻﻴﻠﻬﺎ اﻟﻤﻨﺤﻨﻴﺔ
6
ﺗﻤﺮﻳﻦ ﻣﺜﻞ ﻋﻠﻰ اﻟﺪاﺋﺮة اﻟﻤﺜﻠﺜﻴﺔ اﻟﻨﻘﻂ C ; B ; Aاﻟﺘﻲ أﻓﺎﺻﻴﻠﻬﺎ اﻟﻤﻨﺤﻨﻴﺔ ﻋﻠﻰ اﻟﺘﻮاﻟﻲ هﻲ
−108π 37π
; ; 7π
12 3
π kπ
− +ﺣﻴﺚ ] ∈ . k ﺗﻤﺮﻳﻦ أﻧﺸﺊ ﻋﻠﻰ اﻟﺪاﺋﺮة اﻟﻤﺜﻠﺜﻴﺔ اﻟﻨﻘﻂ M kاﻟﺘﻲ أﻓﺎﺻﻴﻠﻬﺎ اﻟﻤﻨﺤﻨﻴﺔ
4 3
–IVاﻟﺰواﻳﺎ اﻟﻤﻮﺟﻬﺔ
-4اﻟﺰاوﻳﺔ اﻟﻤﻮﺟﻬﺔ ﻟﻨﺼﻔﻲ ﻣﺴﺘﻘﻴﻢ
أ -ﺗﻌﺮﻳﻒ
ﻓﻲ اﻟﻤﺴﺘﻮى اﻟﻤﻮﺟﻪ ﻧﻌﺘﺒﺮ [ [O ; xو [ [O ; yﻧﺼﻔﻲ ﻣﺴﺘﻘﻴﻢ ﻟﻬﻤﺎ ﻧﻔﺲ اﻷﺻﻞ
(Ox
n اﻟﺰوج ) ) ([O ; x [ ; [O ; yﻳﺤﺪد زاوﻳﺔ ﻣﻮﺟﻬﺔ ﻟﻨﺼﻔﻲ ﻣﺴﺘﻘﻴﻢ و ﻳﺮﻣﺰ ﻟﻬﺎ ﺑﺎﻟﺮﻣﺰ ) ;Oy
ب -ﻗﻴﺎﺳﺎت زاوﻳﺔ ﻣﻮﺟﻬﺔ ﻟﻨﺼﻔﻲ ﻣﺴﺘﻘﻴﻢ
ﺗﻌﺮﻳﻒ وﺧﺎﺻﻴﺔ
) (C n
Oxزاوﻳﺔ ﻣﻮﺟﻬﺔ ﻟﻨﺼﻔﻲ ﻣﺴﺘﻘﻴﻢ ،و (
ﻟﺘﻜﻦ ;Oy )
داﺋﺮة ﻣﺜﻠﺜﻴﺔ ﻣﺮآﺰهﺎ A ، Oو Bﻧﻘﻄﺘﻲ ﺗﻘﺎﻃﻊ ) (Cو ﻧﺼﻔﻲ
ﻣﺴﺘﻘﻴﻢ [ [O ; xو [ [O ; yﻋﻠﻰ اﻟﺘﻮاﻟﻲ
ﻟﻴﻜﻦ αو βأﻓﺼﻮﻟﻴﻦ ﻣﻨﺤﻨﻴﻴﻦ ﻟﻠﻨﻘﻄﺘﻴﻦ Aو Bﻋﻠﻰ اﻟﺘﻮاﻟﻲ .
(n
. Ox )
اﻟﻌﺪد β − αﻳﺴﻤﻰ ﻗﻴﺎﺳﺎ ﻟﻠﺰاوﻳﺔ اﻟﻤﻮﺟﻬﺔ ;Oy
آﻞ ﻋﺪد ﺣﻘﻴﻘﻲ ﻳﻜﺘﺐ ﻋﻠﻰ اﻟﺸﻜﻞ β − α + 2k πﺣﻴﺚ ] ∈ k
n
. Ox ( )
ﻳﺴﻤﻰ ﻗﻴﺎﺳﺎ ﻟﻠﺰاوﻳﺔ اﻟﻤﻮﺟﻬﺔ ;Oy
(Ox ;Oy ) = β − α + 2k π Ox ;Oyﻧﻜﺘﺐ ] ∈ k ( (Oxﺑﺎﻟﺮﻣﺰ )
n ﻧﺮﻣﺰ ﻟﻘﻴﺎﺳﺎت اﻟﺰاوﻳﺔ ) ;Oy
و ﻧﻜﺘﺐ أﻳﻀﺎ ] (Ox ;Oy ) ≡ β − α [ 2π
http://arabmaths.ift.fr 4 Moustaouli Mohamed
ﺧﺎﺻﻴﺔ و ﺗﻌﺮﻳﻒ
ﻟﻜﻞ زاوﻳﺔ ﻣﻮﺟﻬﺔ ﻟﻨﺼﻔﻲ ﻣﺴﺘﻘﻴﻢ ﻗﻴﺎس وﺣﻴﺪ ﻳﻨﺘﻤﻲ إﻟﻰ اﻟﻤﺠﺎل ] ]−π ; πﻳﺴﻤﻰ اﻟﻘﻴﺎس
اﻟﺮﺋﻴﺴﻲ ﻟﻬﺬﻩ اﻟﺰاوﻳﺔ اﻟﻤﻮﺟﻬﺔ.
ﺧﺎﺻﻴﺔ
( n
) n
( )
إذا آﺎن θﻗﻴﺎس ﻟﻠـﺰاوﻳﺔ اﻟﻤﻮﺟﻬﺔ Ox ;Oyﻓﺎن θ + 2k πﺣﻴﺚ ] ∈ kﻗﻴﺎس ﻟﻠﺰاوﻳﺔ . Ox ;Oy
α −β ≡0 n
Oxﻓﺎن 2π ( )
و βﻗﻴﺎﺳﻴﻦ ﻟﻠﺰاوﻳﺔ اﻟﻤﻮﺟﻬﺔ ;Oy α إذا آﺎن
(k ∈ ] / أي ) α − β = 2k π
ﻣﻼﺣﻈﺎت
* إذا آﺎﻧﺖ Mﻧﻘﻄﺔ ﻣﻦ داﺋﺮة ﻣﺜﻠﺜﻴﺔ أﺻﻠﻬﺎ Iو ﻣﺮآﺰهﺎ Oﻓﺎن اﻷﻓﺎﺻﻴﻞ اﻟﻤﻨﺤﻨﻴﺔ ﻟﻠﻨﻘﻄﺔ Mهﻲ
OIو أن اﻻﻓﺼﻮل اﻟﻤﻨﺤﻨﻲ اﻟﺮﺋﻴﺴﻲ ﻟـ Mهﻮ اﻟﻘﻴﺎس اﻟﺮﺋﻴﺴﻲn ﻗﻴﺎﺳﺎت اﻟﺰاوﻳﺔ اﻟﻤﻮﺟﻬﺔ ;OM ( )
(OIn
ﻟﻠﺰاوﻳﺔ اﻟﻤﻮﺟﻬﺔ ) ;OM
( )
Oxهﻲ ﻗﻴﺎس اﻟﺰاوﻳﺔ اﻟﻬﻨﺪﺳﻴﺔ n
. xOy n
( )
* اﻟﻘﻴﻤﺔ اﻟﻤﻄﻠﻘﺔ ﻟﻠﻘﻴﺎس اﻟﺮﺋﻴﺴﻲ ﻟﻠﺰاوﻳﺔ اﻟﻤﻮﺟﻬﺔ ;Oy
ﺑﻌﺾ اﻟﺰواﻳﺎ اﻟﺨﺎﺻﺔ
(Ox ;Ox ) ≡ 0 ] [ 2π اﻟﺰاوﻳﺔ اﻟﻤﻨﻌﺪﻣﺔ
(Oy ;Ox ) ≡ π ] [ 2π (Ox ;Oy ) ≡ π ] [ 2π اﻟﺰاوﻳﺔ اﻟﻤﺴﺘﻘﻴﻤﻴﺔ
. (Ox ;Oy ) ≡ π2 ] [ 2π - اﻟﺰاوﻳﺔ اﻟﻘﺎﺋﻤﺔ
n
Oxزاوﻳﺔ ﻗﺎﺋﻤﺔ ﻣﻮﺟﺒﺔ ;Oy ( ) اﻟﺰاوﻳﺔ
. (Ox ;Oy ) ≡ − π2 ] [ 2π -
n
Oxزاوﻳﺔ ﻗﺎﺋﻤﺔ ﺳﺎﻟﺒﺔ. ;Oy ( ) اﻟﺰاوﻳﺔ
ﺗﻤﺮﻳﻦ
25π −143π 601π
; ; -1ﺑﻴﻦ أن اﻟﻘﻴﺎﺳﺎت اﻟﺘﺎﻟﻴﺔ ﺗﻤﺜﻞ ﻗﻴﺎﺳﺎت ﻧﻔﺲ اﻟﺰاوﻳﺔ
6 6 6
25π 52π
− ; -2ﻣﺎ هﻮ اﻟﻘﻴﺎس اﻟﺮﺋﻴﺴﻲ ﻟﺰاوﻳﺔ ﻣﻮﺟﻬﺔ ﻗﻴﺎﺳﻬﺎ أﺣﺪ اﻟﻘﻴﺎﺳﺎت ; −36π ; 47π
3 5
.
−234π
5
n
Oxﻗﻴﺎﺳﻬﺎ -3أﻧﺸﺊ زاوﻳﺔ ﻣﻮﺟﻬﺔ ;Oy ( )
( AB ; AC ) ≡ − π3 ] [ 2π أﻧﺸﺊ ABCﻣﺜﻠﺚ ﻣﺘﺴﺎوي اﻷﺿﻼع ﺣﻴﺚ ﺗﻤﺮﻳﻦ
ج -ﻋﻼﻗﺔ ﺷﺎل وﻧﺘﺎﺋﺠﻬﺎ
ﻋﻼﻗﺔ ﺷﺎل
[ [O ; zﺛﻼﺛﺔ أﻧﺼﺎف ﻣﺴﺘﻘﻴﻢ ﻟﻬﺎ ﻧﻔﺲ اﻷﺻﻞ ﻓﺎن إذا آﺎﻧﺖ [ [O ; xو [ [O ; yو
) (Ox ;Oy ) + (Oy ;Oz ) ≡ (Ox ;Oz ] [ 2π
ﻧﺘﺎﺋﺞ
[ [O ; xو [ [O ; yﻧﺼﻔﻲ ﻣﺴﺘﻘﻴﻢ ﻓﺎن ] (Ox ;Oy ) ≡ − (Oy ;Ox ) [ 2π * اذا آﺎن
* اذا آﺎﻧﺖ [ [O ; xو [ [O ; yو [ [O ; zﺛﻼﺛﺔ أﻧﺼﺎف ﻣﺴﺘﻘﻴﻢ ﺗﺤﻘﻖ ] (Ox ;Oy ) ≡ (Ox ;Oz ) [ 2π
ﻓﺎن [ [O ; xو [ [O ; yﻧﺼﻔﻲ ﻣﺴﺘﻘﻴﻢ ﻣﻨﻄﺒﻘﺎن.
http://arabmaths.ift.fr 5 Moustaouli Mohamed
و هﺬا ﻳﻌﻨﻲ أﻧﻪ اذا آﺎن [ [Oxﻧﺼﻒ ﻣﺴﺘﻘﻴﻢ و αﻋﺪدا ﺣﻘﻴﻘﻴﺎ ﻓﺎﻧﻪ ﻳﻮﺟﺪ ﻧﺼﻒ ﻣﺴﺘﻘﻴﻢ وﺣﻴﺪ
( )
. Ox ;Oy ≡ α ] [ 2π [ [O ; yﺑﺤﻴﺚ
د -زاوﻳﺔ زوج ﻣﺘﺠﻬﺘﻴﻦ ﻏﻴﺮ ﻣﻨﻌﺪﻣﺘﻴﻦ
ﺗﻌﺮﻳﻒ
G G
ﻟﺘﻜﻦ uو vﻣﺘﺠﻬﺘﻴﻦ ﻏﻴﺮ ﻣﻨﻌﺪﻣﺘﻴﻦ ﻣﻦ اﻟﻤﺴﺘﻮى
اﻟﻤﻮﺟﻪ .و [ [O ; xو [ [O ; yﻧﺼﻔﻲ ﻣﺴﺘﻘﻴﻢ ﻣﻮﺟﻬﻴﻦ ﻋﻠﻰ
G G
اﻟﺘﻮاﻟﻲ ﺑﺎﻟﻤﺘﺠﻬﺘﻴﻦ uو .v
(n
Ox ) G G
زاوﻳﺔ زوج اﻟﻤﺘﺠﻬﺘﻴﻦ ) (u ;vهﻲ اﻟﺰاوﻳﺔ اﻟﻤﻮﺟﻬﺔ ;Oy
) (
G G
. unو ﻳﺮﻣﺰ ﻟﻬﺎ ﺑﺎﻟﺮﻣﺰ ;v
ﻣﻼﺣﻈﺔ
G G
n
) (
ﻣﺠﻤﻮﻋﺔ ﻗﻴﺎﺳﺎت اﻟﺰاوﻳﺔ u ;vهﻲ ﻣﺠﻤﻮﻋﺔ ﻗﻴﺎﺳﺎت
(
n
. Ox )
اﻟﺰاوﻳﺔ ;Oy
ﻋﻼﻗﺔ ﺷﺎل وﻧﺘﺎﺋﺠﻬﺎ
ﻋﻼﻗﺔ ﺷﺎل
G G G
إذا آﺎﻧﺖ uو vو wﺛﻼﺛﺔ ﻣﺘﺠﻬﺎت ﻏﻴﺮ ﻣﻨﻌﺪﻣﺔ ﻓﺎن
) ( ) ( ) (
G G G G G G
u; v + v; w ≡ u; w ] [ 2π
ﻧﺘﺎﺋﺞ
) ( ) (G G G G
u; v ≡ − u; v
G G
* اذا آﺎن uو vﻣﺘﺠﻬﺘﻴﻦ ﻏﻴﺮ ﻣﻨﻌﺪﻣﺘﻴﻦ ﻓﺎن ] [ 2π
) ( ) (
G G G G
u; v ≡ u; w
G G G
* اذا آﺎﻧﺖ uو vو wﺛﻼﺛﺔ ﻣﺘﺠﻬﺎت ﻏﻴﺮ ﻣﻨﻌﺪﻣﺔ ﺗﺤﻘﻖ ] [ 2π
G G
ﻓﺎن vو wﻣﺴﺘﻘﻴﻤﻴﺘﻴﻦ وﻟﻬﻤﺎ ﻧﻔﺲ اﻟﻤﻨﺤﻰ.
ﺗﻤﺮﻳﻦ
ﻟﺘﻜﻦ ) (Cداﺋﺮة ﻣﺜﻠﺜﻴﺔ ﻣﺮآﺰهﺎ Oو أﺻﻠﻬﺎ . Iﻧﻌﺘﺒﺮ ﻋﻠﻰ ) (Cاﻟﻨﻘﻂ اﻟﺘﺎﻟﻴﺔ اﻟﻤﻌﺮﻓﺔ ﺑﺄﻓﺎﺻﻴﻠﻬﺎ
−17π 23π 3π
F E B ) A (π اﻟﻤﻨﺤﻨﻴﺔ
3 4 2
ﻟﻜﻞ ﻣﻨﻬﻦ ﻣﻦ اﻟﺰاوﻳﺎ اﻟﺘﺎﻟﻴﺔ ،ﺛﻢ ﺣﺪد اﻟﻘﻴﺎس اﻟﺮﺋﻴﺴﻲ أﻋﻂ ﻗﻴﺎﺳﺎ ﻟﻜﻞ
( ( ) ( ) ( ) )
JJJG
n JJJG JJJ
n G JJJG JJJ
n G JJJG JJJ
n G JJJG
; OE ;OF ; OA ;OE ; OB ;OA OA ;OA
- Vاﻟﻨﺴﺐ اﻟﻤﺜﻠﺜﻴﺔ
-1اﻟﻤﻌﻠﻢ اﻟﻤﺘﻌﺎﻣﺪ اﻟﻤﻤﻨﻈﻢ اﻟﻤﺮﺗﺒﻂ ﺑﺎﻟﺪاﺋﺮة اﻟﻤﺜﻠﺜﻴﺔ
ﻟﺘﻜﻦ ) (Cداﺋﺮة ﻣﺜﻠﺜﻴﺔ ﻣﺮآﺰهﺎ Oو أﺻﻠﻬﺎ . I
n
OIزاوﻳﺔ ﻗﺎﺋﻤﺔ ﻣﻮﺟﺒﺔ (
ﺑﺤﻴﺚ ;OJ ) وﻟﺘﻜﻦ Jﻣﻦ ) (C
JJG JJJG
اﻟﻤﻌﻠﻢ O ;OI ;OJﻳﺴﻤﻰ اﻟﻤﻌﻠﻢ اﻟﻤﺘﻌﺎﻣﺪ اﻟﻤﻤﻨﻈﻢ( )
اﻟﻤﺒﺎﺷﺮ اﻟﻤﺮﺗﺒﻂ ﺑﺎﻟﺪاﺋﺮة اﻟﻤﺜﻠﺜﻴﺔ ) . (C
n
OIزاوﻳﺔ ﻗﺎﺋﻤﺔ ﺳﺎﻟﺒﺔ .(ﺑﺤﻴﺚ ' ;OJ) ﻟﺘﻜﻦ ' Jﻣﻦ ) (C
JJG JJJG
(
اﻟﻤﻌﻠﻢ ' O ;OI ;OJﻳﺴﻤﻰ اﻟﻤﻌﻠﻢ اﻟﻤﺘﻌﺎﻣﺪ اﻟﻤﻤﻨﻈﻢ )
اﻟﻐﻴﺮ اﻟﻤﺒﺎﺷﺮ اﻟﻤﺮﺗﺒﻂ ﺑﺎﻟﺪاﺋﺮة اﻟﻤﺜﻠﺜﻴﺔ ) . (C
http://arabmaths.ift.fr 6 Moustaouli Mohamed
-2اﻟﻨﺴﺐ اﻟﻤﺜﻠﺜﻴﺔ
1-2ﺗﻌﺎرﻳﻒ
JJG JJJG
( )
ﻟﺘﻜﻦ ) (Cداﺋﺮة ﻣﺜﻠﺜﻴﺔ و O ;OI ;OJاﻟﻤﻌﻠﻢ اﻟﻤﺘﻌﺎﻣﺪ
ﻧﻘﻄﺔ ﻣﻦ ) (C اﻟﻤﻤﻨﻈﻢ اﻟﻤﺮﺗﺒﻂ ﺑﻬﺎ .ﻟﺘﻜﻦ M
و xأﻓﺼﻮﻻ ﻣﻨﺤﻨﻴﺎ ﻟﻬﺎ .ﻧﻌﺘﺒﺮ Cاﻟﻤﺴﻘﻂ اﻟﻌﻤﻮدي ﻟـ M
ﻋﻠﻰ ) (OIو Sاﻟﻤﺴﻘﻂ اﻟﻌﻤﻮدي ﻟـ M
ﻋﻠﻰ ) (OJ
JJG JJJG
( )
* -اﻟﻌﺪد اﻟﺤﻘﻴﻘﻲ أﻓﺼﻮل اﻟﻨﻘﻄﺔ Mﻓﻲ اﻟﻤﻌﻠﻢ O ;OI ;OJ
ﻳﺴﻤﻰ ﺟﻴﺐ ﺗﻤﺎم اﻟﻌﺪد اﻟﺤﻘﻴﻘﻲ xﻧﺮﻣﺰ ﻟﻪ ﺑـ cos x
JJG JJJG
( )
* -اﻟﻌﺪد اﻟﺤﻘﻴﻘﻲ أرﺗﻮب اﻟﻨﻘﻄﺔ Mﻓﻲ اﻟﻤﻌﻠﻢ O ;OI ;OJ
ﻳﺴﻤﻰ ﺟﻴﺐ اﻟﻌﺪد اﻟﺤﻘﻴﻘﻲ . xﻧﺮﻣﺰ ﻟﻪ ﺑـ sin x
* -ﻟﻴﻜﻦ ∆ اﻟﻤﻤﺎس ﻟـ ) (Cﻋﻨﺪ Iو اﻟﻨﻘﻄﺔ ). P (1;1
(OMو ∆ أي ) ﻟﺘﻜﻦ Tﻧﻘﻄﺔ ﺗﻘﺎﻃﻊ
π
]∈ k ≠ x +kπ
2
اﻟﻌﺪد اﻟﺤﻘﻴﻘﻲ أﻓﺼﻮل Tﻓﻲ اﻟﻤﻌﻠﻢ ) ( I ; Pﻳﺴﻤﻰ
ﻇﻞ اﻟﻌﺪد اﻟﺤﻘﻴﻘﻲ xﻧﺮﻣﺰ ﻟﻪ ﺑـ . tan x
ﻣﻼﺣﻈﺔ و اﺻﻄﻼﺣﺎت
-إذا آﺎن xأﻓﺼﻮل ﻣﻨﺤﻨﻲ ﻟﻨﻘﻄﺔ Mﻓﺎن ) M ( cos x ;sin x
\→\
ﺗﺴﻤﻰ داﻟﺔ ﺟﻴﺐ اﻟﺘﻤﺎم ﺣﻴﺰ ﺗﻌﺮﻳﻔﻬﺎ \ ﻳﺮﻣﺰ ﻟﻬﺎ ﺑـ cos اﻟﺪاﻟﺔ -
x → cos x
\→\
ﺗﺴﻤﻰ داﻟﺔ اﻟﺠﻴﺐ ﺣﻴﺰ ﺗﻌﺮﻳﻔﻬﺎ \ ﻳﺮﻣﺰ ﻟﻬﺎ ﺑـ sin اﻟﺪاﻟﺔ -
x → sin x
π \→\
ﺗﺴﻤﻰ داﻟﺔ اﻟﻈﻞ ﺣﻴﺰ ﺗﻌﺮﻳﻔﻬﺎ \ − + k π / k ∈ ] ﻳﺮﻣﺰ ﻟﻬﺎ ﺑـ tan اﻟﺪاﻟﺔ -
2 x → tan x
-2-2ﺧﺎﺻﻴﺎت
* -آﻴﻔﻤﺎ آﺎن وﺿﻊ Mﻧﻘﻄﺔ ﻣﻦ ) (Cأﻓﺼﻮﻟﻬﺎ ﻣﻨﺤﻲ xاﻟﻨﻘﻄﺔ Cﺗﻨﺘﻤﻲ اﻟﻰ اﻟﻘﻄﻌﺔ ]' [ II
و Sﺗﻨﺘﻤﻲ اﻟﻰ ]' [ JJﺣﻴﺚ )I (1;0 ) ; I ' ( −1;0 ) ; J ' ( 0; −1) ; J ( 0;1
−1 ≤ cos x ≤ 1 −1 ≤ sin x ≤ 1 ﻟﻜﻞ \ ∈ x
cos 2 x + sin 2 x = 1 * -ﻟﻜﻞ \ ∈ x
sin x π
= tan x * -ﻟﻜﻞ x ∈ \ − + kπ / k ∈ ]
cos x 2
* -ﻧﻌﻠﻢ أن ﺟﻤﻴﻊ اﻷﻋﺪاد اﻟﺤﻘﻴﻘﻴﺔ اﻟﺘﻲ ﺗﻜﺘﺐ x + 2k πﺣﻴﺚ ] ∈ ، kأﻓﺎﺻﻴﻞ ﻣﻨﺤﻨﻴﺔ ﻟﻨﻔﺲ
اﻟﻨﻘﻄﺔ M
cos ( x + 2kπ ) = cos x ; sin ( x + 2kπ ) = sin x ﻟﻜﻞ \ ∈ x
-ﻣﻬﻤﺎ آﺎﻧﺖ ) M ( x + k πﻟﺪﻳﻨﺎ أﻓﺼــــﻮل Tهﻮ tan x
π
tan ( x + kπ ) = tan x ﻟﻜﻞ x ∈ \ − + kπ / k ∈ ]
2
π
tan ( x + π ) = tan x ﻟﻜﻞ x ∈ \ − + kπ / k ∈ ] ﺣﺎﻟﺔ ﺧﺎﺻﺔ
2
http://arabmaths.ift.fr 7 Moustaouli Mohamed
ﺑﺘﻮﻇﻴﻒ اﻟﺪاﺋﺮة اﻟﻤﺜﻠﺜﻴﺔ ﻧﺤﺼﻞ ﻋﻠﻰ-*
x ∈ \ ﻟﻜﻞ cos ( − x ) = cos x ; sin ( − x ) = − sin x ¾
. ﻓﺮدﻳﺔsin زوﺟﻴﺔ و أن اﻟﺪاﻟﺔcos ﻧﻌﺒﺮﻋﻦ هﺬا ﺑﻘﻮﻟﻨﺎ ان اﻟﺪاﻟﺔ
π
x ∈ \ − + kπ / k ∈ ] آﻞ tan ( − x ) = − tan x ¾
2
. ﻓﺮدﻳﺔtan ﻧﻌﺒﺮ ﻋﻦ هﺬا ﺑﻘﻮﻟﻨﺎ ان اﻟﺪاﻟﺔ
x ∈ \ ﻟﻜﻞ sin (π − x ) = sin x ; cos (π − x ) = − cos x ¾
x ∈ \ ﻟﻜﻞ sin (π + x ) = − sin x ; cos (π + x ) = − cos x ¾
π π
x ∈ \ ﻟﻜﻞ sin − x = cos x ; cos − x = sin x ¾
2 2
π π
x ∈ \ ﻟﻜﻞ sin + x = cos x ; cos + x = − sin x ¾
2 2
ﻧﺴﺐ ﻣﺜﻠﺜﻴﺔ اﻋﺘﻴﺎدﻳﺔ-3-2
π π π π 2π 3π 5π
x 0
6 4 3 2 3 4 6 π
1 2 3 3 2 1
sinx 0 1 0
2 2 2 2 2 2
3 2 1 1 2 3
cosx 1 0 - - - -1
2 2 2 2 2 2
3 ﻏﻴﺮ 3
tanx 0 1 3 - 3 -1 - 0
3 ﻣﻌﺮف 3
ﺗﻤﺎرﻳﻦ
34π −37π 53π −7π
cos ;cos ;sin ;sin أﺣﺴﺐ1ﺗﻤﺮﻳﻦ
3 4 6 2
π 2π 11π
1 + cos + cos + .... + cos ﺣﺪد- أ2ﺗﻤﺮﻳﻦ
6 6 6
7π 27π
sin + x + cos − x + sin ( 3π + x ) − cos ( 7π − x ) ﺑﺴﻂ-ب
2 2
http://arabmaths.ift.fr 8 Moustaouli Mohamed
ﺗﻤﺎرﻳﻦ
ﺗﻤﺎرﻳﻦ ﻣﺤﻠﻮﻟﺔ
ﺗﻤﺮﻳﻦ1
238π 267π G G
−
3
و
6
( )
ﻓﻲ ﻣﺴﺘﻮى ﻣﻨﺴﻮب إﻟﻰ ﻣﻌﻠﻢ ﻣﺘﻌﺎﻣﺪ ﻣﻤﻨﻈﻢ ﻣﺒﺎﺷﺮ ، O ; i ; jﻧﻌﺘﺒﺮ
( )
JJJ
n G JJJG −42π
≡ . OA; OC اﻷﻓﺼﻮﻟﻴﻦ اﻟﻤﻨﺤﻨﻴﻴﻦ ﻟﻠﻨﻘﻄﺘﻴﻦ Aو . Bﻟﺘﻜﻦ Cﻧﻘﻄﺔ ﺣﻴﺚ ] [ 2π
5
-1ﺣﺪد اﻷﻓﺼﻮﻟﻴﻦ اﻟﻤﻨﺤﻨﻴﻴﻦ اﻟﺮﺋﻴﺴﻴﻦ ﻟﻠﻨﻘﻄﺘﻴﻦ Aو B
( )
JJJG JJJG JJJ
G JJJG
( n
)
-2ﺣﺪد اﻟﻘﻴﺎس اﻟﺮﺋﻴﺴﻲ OA; OBﺛﻢ ﺣﺪد cos OA ;OB
( )
JJJG
n JJJG
-3ﺣﺪد اﻟﻘﻴﺎس اﻟﺮﺋﻴﺴﻲ OC ;OB
-4ﻣﺜﻞ اﻟﻨﻘﻂ Aو Bو Cﻋﻠﻰ اﻟﺪاﺋﺮة اﻟﻤﺜﻠﺜﻴﺔ
ﺗﻤﺮﻳﻦ2
3π π 5π 7π
A = cos 2 + cos 2
+ cos 2 + cos 2 -1أﺣﺴﺐ
8 8 8 8
π 3π 5π 7π
B = sin 2 + sin 2 + sin 2 + sin 2
8 8 8 8
7π π π π
cos sinو cosو -2ﻋﻠﻤﺎ أن tan = 2 − 1ﺣﺪد
8 8 8 8
ﺗﻤﺮﻳﻦ3
7π 27π
C = sin + x ⋅ cos ( 7π − x ) + cos -1ﺑﺴﻂ ) − x ⋅ sin ( 3π + x
2 2
-2ﺑﻴﻦ أن cos6 x + sin 6 x + 3cos 2 x sin 2 x = 1
اﻟﺤﻞ
ﺗﻤﺮﻳﻦ1
-1ﻧﺤﺪد اﻷﻓﺼﻮﻟﻴﻦ اﻟﻤﻨﺤﻨﻴﻴﻦ اﻟﺮﺋﻴﺴﻴﻦ ﻟﻠﻨﻘﻄﺘﻴﻦ Aو B
π 267π π 267π
ﺣﻴﺚ ] ∈ ]−π ; π = 2 × 22π + و A ﻟﺪﻳﻨﺎ
2 6 2 6
π
اﻷﻓﺼﻮل اﻟﻤﻨﺤﻨﻲ اﻟﺮﺋﻴﺴﻲ ﻟﻠﻨﻘﻄﺔ A إذن
2
2π 238π 2π 238π
−ﺣﻴﺚ ] ∈ ]−π ; π = 2 × −40π + B−و ﻟﺪﻳﻨﺎ
3 3 3 3
2π
اﻷﻓﺼﻮل اﻟﻤﻨﺤﻨﻲ اﻟﺮﺋﻴﺴﻲ ﻟﻠﻨﻘﻄﺔ B إذن
3
) (
JJJG JJJG JJJ
G JJJG
( n
)
-2ﻧﺤﺪد اﻟﻘﻴﺎس اﻟﺮﺋﻴﺴﻲ OA; OBﺛﻢ ﻧﺤﺪد cos OA ;OB
(OA = ) ; OB
π JJJ
n G JJJG 2π π π
و ] ∈ ]−π ; π − + 2k π = + 2k π
6 3 2 6
(OA ) ; OB
JJJG JJJG π JJJG JJJ
G π
(
= cos OA; OB = cos
6
)2
3
وﻣﻨﻪ
n
اﻟﻘﻴﺎس اﻟﺮﺋﻴﺴﻲ
6
إذن
(OC ) ;OB
JJJG
n JJJG
-3ﻧﺤﺪد اﻟﻘﻴﺎس اﻟﺮﺋﻴﺴﻲ
(OA ≡ ) ; OC
JJJ
n G JJJG −42π
] [ 2π ﻟﺪﻳﻨﺎ
5
ﺣﺴﺐ ﻋﻼﻗﺔ ﺷﺎل ﻟﺪﻳﻨﺎ
http://arabmaths.ift.fr 9 Moustaouli Mohamed
( ) ( )( )
JJJG
n JJJG JJJG
n JJJG JJJ
n G JJJG
OC ; OB = OC ; OA + OA; OB + 2kπ
(OC ; OB ) = − ( OA; OC ) + ( OA; OB ) + 2kπ
JJJG
n JJJG JJJ
n G JJJG JJJ
n G JJJG
(OC ; OB ) =
JJJG
n JJJG 42π π
+ + 2k π
5 6
(OC ; OB ) =
JJJG
n JJJG 257π
+ 2k π
30
( ) = 30 + 8π + 2kπ = 1730π + 2 ( 4 + k )π
JJJG
n JJJG 17π
OC ; OB
(OC ;OB )
JJJG
n JJJG 17π 17π
اﻟﻘﻴﺎس اﻟﺮﺋﻴﺴﻲ هﻲ ∈ ]−π ; π ] وﺣﻴﺚ
ﻓﺎن
30 30
ﻋﻠﻰ اﻟﺪاﺋﺮة اﻟﻤﺜﻠﺜﻴﺔC وB وA ﻧﻤﺜﻞ اﻟﻨﻘﻂ-4
2ﺗﻤﺮﻳﻦ
B و A ﻧﺤﺴﺐ-1
π 3π 5π 7π
A = cos 2 + cos 2 + cos 2 + cos 2 ﻟﺪﻳﻨﺎ
8 8 8 8
7π π 7π π π
cos 2 = cos 2 وﻣﻨﻪcos = cos π − = − cos
8 8 8 8 8
5π 3π 5π 3π 3π
cos 2 = cos 2 وﻣﻨﻪcos = cos π − = − cos
8 8 8 8 8
π 3π
A = 2 cos 2 + cos 2 و ﺑﺎﻟﺘﺎﻟﻲ
8 8
π π
A = 2 cos 2 + sin 2 = 2 وﻣﻨﻪcos 3π = cos π − π = sin π ﻟﺪﻳﻨﺎ
8 8 8 2 8 8
π 3π 5π 7π
B = sin 2 + sin 2 + sin 2 + sin 2 ﻟﺪﻳﻨﺎ
8 8 8 8
وﻣﻨﻪ
π π 3π 3π 5π 5π 7π 7π
A + B = sin 2 + cos 2 + sin 2 + cos 2 + sin 2 + cos 2 + sin 2 + cos 2
8 8 8 8 8 8 8 8
B = 4 − A = 4 − 2 = 2 اذنA + B = 4 و ﺑﺎﻟﺘﺎﻟﻲ
http://arabmaths.ift.fr 10 Moustaouli Mohamed
7π π π
cos وsin وcos ﻧﺤﺪد-2
8 8 8
π 1 π
1 + tan 2 = ﻧﻌﻠﻢ أن tan = 2 − 1 ﻟﺪﻳﻨﺎ
8 2 π 8
cos
8
π 1 1 1 1 2+ 2
cos 2 = = = = = وﻣﻨﻪ
8
1 + tan 2
π
1+ ( 2 −1 )
2
4−2 2 (
2 2− 2 ) 4
8
π π π π
sin ; 0 وcos ; 0 ﻓﺎن ∈ 0; وﺣﻴﺚ أن
8 8 8 2
π π 2+ 2 2− 2 π 2+ 2
sin = 1 − cos 2 = 1− = و cos = و ﺑﺎﻟﺘﺎﻟﻲ
8 8 4 2 8 2
7π π 2+ 2
cos = − cos = −
8 8 2
3ﺗﻤﺮﻳﻦ
7π 27π
C = sin + x ⋅ cos ( 7π − x ) + cos − x ⋅ sin ( 3π + x ) ﻧﺒﺴﻂ-1
2 2
sin ( 3π + x ) = sin (π + x ) = − sin x ﻟﺪﻳﻨﺎ
27π π π π
cos − x = cos 14π − − x = cos − − x = cos + x = − sin x و
2 2 2 2
cos ( 7π − x ) = cos (π − x ) = − cos x و
7π π π
sin + x = sin 4π − + x = − sin − x = − cos x و
2 2 2
C = cos 2 x + sin 2 x = 1 إذن
cos6 x + sin 6 x + 3cos 2 x sin 2 x = 1 ﻧﺒﻴﻦ أن-2
( )(
cos6 x + sin 6 x + 3cos 2 x ⋅ sin 2 x = cos 2 x + sin 2 x cos 4 x − cos 2 x ⋅ sin 2 x + sin 4 x + 3cos 2 x ⋅ sin 2 x )
= cos 4 x − cos 2 x ⋅ sin 2 x + sin 4 x + 3cos 2 x ⋅ sin 2 x
= cos 4 x + 2 cos 2 x ⋅ sin 2 x + sin 4 x
( )
2
= cos 2 x + sin 2 x =1
ﺗﻤﺎرﻳﻦ ﻏﻴﺮ ﻣﺤﻠﻮﻟﺔ
1اﻟﺘﻤﺮﻳﻦ
−214π 789π
; ﺣﺪد اﻷﻓﺼﻮل اﻟﻤﻨﺤﻨﻲ اﻟﺮﺋﻴﺴﻲ اﻟﻤﺮﺗﺒﻂ ﺑﺎﻻﻓﺼﻮﻟﻴﻦ اﻟﻤﻨﺤﻨﻴﻴﻦ اﻟﺘﺎﻟﻴﻴﻦ-1
5 7
−59π 23π 2π −π
و و و ﻣﺜﻞ ﻋﻠﻰ اﻟﺪاﺋﺮة اﻟﻤﺜﻠﺜﻴﺔ اﻟﻨﻘﻂ ذات اﻷﻓﺎﺻﻴﻞ اﻟﻤﻨﺤﻨﻴﺔ-2
4 2 3 6
25π −143π 601π
; ; ﺑﻴﻦ أن اﻻﻋﺪاد اﻟﺘﺎﻟﻴﺔ ﺗﻤﺜﻞ اﻻﻓﺎﺻﻴﻞ اﻟﻤﻨﺤﻨﻴﺔ ﻟﻨﻔﺲ اﻟﻨﻘﻄﺔ-3
6 6 6
π π
k ∈ ] ﺣﻴﺚ +k اﻟﺘﻲ أﻓﺎﺻﻴﻠﻬﺎ اﻟﻤﻨﺤﻨﻴﺔ هﻲM k ﻣﺜﻞ ﻋﻠﻰ اﻟﺪاﺋﺮة اﻟﻤﺜﻠﺜﻴﺔ اﻟﻨﻘﻂ-2
3 4
M اﻷﻓﺼﻮل اﻟﻤﻨﺤﻨﻲ اﻟﺮﺋﻴﺴﻲ ﻟﻨﻘﻄﺔx ﻟﻴﻜﻦ-4
ﻓﻲ اﻟﺤﺎﻟﺘﻴﻦ اﻟﺘﺎﻟﻴﺘﻴﻦI اﻟﺘﻲ ﺗﻨﺘﻤﻲ اﻟﻰ اﻟﻤﺠﺎلM ﺣﺪد اﻷﻓﺎﺻﻴﻞ اﻟﻤﻨﺤﻨﻴﺔ ﻟﻨﻘﻄﺔ
−33π −13π −2π 34π 43π π
I = ; x = (b I = ; x = (a
5 5 5 3 3 4
http://arabmaths.ift.fr 11 Moustaouli Mohamed
π
3x ≡ [ 2π ] ﺣﻴﺚ x اﻟﺘﻲ أﻓﺼﻮﻟﻬﺎ اﻟﻤﻨﺤﻨﻲM ﺿﻊ ﻋﻠﻰ داﺋﺮة ﻣﺜﻠﺜﻴﺔ اﻟﻨﻘﻂ-5
2
ﻣﺎ هﻮ اﻟﻘﻴﺎس اﻟﺮﺋﻴﺴﻲ ﻟﺰاوﻳﺔ ﻣﻮﺟﻬﺔ ﻗﻴﺎﺳﻬﺎ أﺣﺪ اﻟﻘﻴﺎﺳﺎت-6
25π 52π
− ; ; −36π ; 47π
3 5
2اﻟﺘﻤﺮﻳﻦ
( )
JJJG
n JJJJG 2π
AB ; AC ≡ − [ 2π ] ﺣﻴﺚA ﻣﺘﺴﺎوي اﻟﺴﺎﻗﻴﻦ ﻓﻲ اﻟﺮأسABC أﻧﺸﺊ ﻣﺜﻠﺜﺎ-
5
(CB; AC ) ( BA; AC ) ( BA; BC )
n JJJG JJJGn JJJG JJJG
n JJJG JJJG
و و ﺣﺪد ﺑﺎﻟﺮدﻳﺎن ﻗﻴﺎس آﻞ ﻣﻦ اﻟﺰواﻳﺎ-
3اﻟﺘﻤﺮﻳﻦ
JJJ
n G JJJJG −π
( ﻓﻲ آﻞ ﻣﻦ اﻟﺤﺎﻟﺘﻴﻦOA ;OM ) أﻋﻂ اﻟﻘﻴﺎس اﻟﺮﺋﻴﺴﻲ ﻟﻠﺰاوﻳﺔ. A ﻋﻠﻰ اﻟﺪاﺋﺮة اﻟﻤﺜﻠﺜﻴﺔ ﻧﻌﺘﺒﺮ
3
JJJ
n G JJJJG 23π 27π
(OJ ;OM ) ≡ [ 2π ] (b M أﻓﺼﻮل ﻣﻨﺤﻨﻲ ﻟﻨﻘﻄﺔ (a
8 2
4اﻟﺘﻤﺮﻳﻦ
−23π 15π 73π 7π
sin ; sin ; tan − ; cos ﺣﺪد اﻟﻨﺴﺐ اﻟﻤﺜﻠﺜﻴﺔ ﻟﻸﻋﺪاد-1
3 4 3 6
3π π 7π 7π 7π 2− 2
sin ; sin ; tan ; cos ﻓﺄﺣﺴﺐsin = إذا ﻋﻠﻤﺖ أن-2
8 8 8 8 8 2
−25π −78π 327π
sin ; tan ; cos
8 8 8
5اﻟﺘﻤﺮﻳﻦ
tan x − 1 π
A= ﻧﻀﻊ. x ∈ ; π ﻟﻴﻜﻦ
tan x + 1
2
2
A = cos x sin x − cos x ﺑﻴﻦ أن-1
2
4
A ﻓﺄﺣﺴﺐsin x = إذا ﻋﻠﻤﺖ أن-2
5
x ﻓﺎﺣﺴﺐA = 0 إذا ﻋﻠﻤﺖ أن-3
6اﻟﺘﻤﺮﻳﻦ
3π π 7π 7π 7π 2− 2
sin ; sin ; tan ; cos أﺣﺴﺐsin = إذا ﻋﻠﻤﺖ أن-1
8 8 8 8 8 2
B = (1 + sin x + cos x ) − 2 (1 + sin x )(1 + cos x ) A = cos6 x + sin 6 x + 3cos 2 x ⋅ sin 2 x ﺑﺴﻂ-2
2
D = cos6 x + sin 6 x + cos 4 x + sin 4 x + 5cos 2 x sin 2 x C = 2 ( cos 6 x + sin 6 x ) − 3 ( cos 4 x + sin 4 x )
7اﻟﺘﻤﺮﻳﻦ
π
2π 3π 4π
tan + tan
+ tan + tan أﺣﺴﺐ-1
5 5 5 5
x ∈ \ ﻟﻴﻜﻦ-2
π π
sin (π − x ) ⋅ cos − x − sin − x ⋅ cos (π − x ) ﺑﺴﻂ
2 2
sin(x − 7π ) + sin(x + 9π )
27π
cos(x − ) − sin(x + 27π )
2
8اﻟﺘﻤﺮﻳﻦ
π π
A = cos 4 x + sin 4 x − (sin x cos x )(cos x − sin x ) 2 ﻧﻌﺘﺒﺮ. x ∈ 0; ∪ ; π ﻟﻴﻜﻦ
2 2
A = 1 − sin x ⋅ cos x ﺑﻴﻦ أن-1
http://arabmaths.ift.fr 12 Moustaouli Mohamed
11π 11π 6− 2
= x أﺣﺴﺐ Aﻣﻦ أﺟﻞ sin = -2ﻋﻠﻤﺎ أن
12 12 4
اﻟﺘﻤﺮﻳﻦ9
1
P ( x ) = cos6 x + sin 6 x −ﺣﻴﺚ ] x ∈ [ 0; π ﻧﻀﻊ
4
3
( )
2
= ) P (x -1ﺑﻴﻦ أن 2 cos 2 x − 1
4
-2أآﺘﺐ ) P ( xﺑﺪﻻﻟﺔ tan x
P ( xو . cos x ) أﺣﺴﺐ -3ﻋﻠﻤﺎ أن tan x = − 2
اﻟﺘﻤﺮﻳﻦ10
ﺣﺪد
π 2π 3π 13π π 3π 5π 7π
B = 1 + sin + sin + sin + ..... + sin A = cos 2 + cos 2 + cos 2 + cos 2
7 7 7 7 8 8 8 8
اﻟﺘﻤﺮﻳﻦ11
−3
= ، cos αﺛﻢ ﻟﻮن ﺑﺎﻷﺣﻤﺮ ﺟﺰء اﻟﺪاﺋﺮة ﻣﺜﻞ ﻋﻠﻰ داﺋﺮة اﻟﻤﺜﻠﺜﻴﺔ اﻟﻨﻘﻂ Mاﻟﺘﻲ أﻓﺎﺻﻴﻠﻬﺎ اﻟﻤﻨﺤﻨﻴﺔ αﺣﻴﺚ
4
3
اﻟﻤﺜﻠﺜﻴﺔ اﻟﺬي ﻳﺤﺘﻮي ﻋﻠﻰ اﻟﻨﻘﻂ اﻟﺘﻲ أﻓﺎﺻﻴﻠﻬﺎ اﻟﻤﻨﺤﻨﻴﺔ βﺣﻴﺚ cos β ≤ −
4
اﻟﺘﻤﺮﻳﻦ12
ﺣﻴﺚ tan θ ≥ 2 ﻟﻮن ﺑﺎﻷﺣﻤﺮ ﻣﺠﻤﻮﻋﺔ اﻟﻨﻘﻂ Mاﻟﺘﻲ أﻓﺎﺻﻴﻠﻬﺎ اﻟﻤﻨﺤﻨﻴﺔ θ
اﻟﺘﻤﺮﻳﻦ13
1
ﻋﻠﻰ اﻟﺪاﺋﺮة اﻟﻤﺜﻠﺜﻴﺔ اﻧﺸﺊ اﻟﻨﻘﻄﺘﻴﻦ M 1و M 2اﻟﺬي أرﺗﻮﺑﻴﻬﻤﺎ
2
1
; sin x -1ﺣﺪد ﻣﺠﻤﻮﻋﺔ اﻟﻨﻘﻂ Mاﻟﺘﻲ أﻓﺎﺻﻴﻠﻬﺎ اﻟﻤﻨﺤﻨﻴﺔ xﺣﻴﺚ
2
1
-2ﺣﺪد ﻣﺠﻤﻮﻋﺔ اﻷﻋﺪاد xﻣﻦ ] ]−π ; πﺣﻴﺚ ; sin x
2
1
-3ﺣﺪد ﻣﺠﻤﻮﻋﺔ اﻷﻋﺪاد xﻣﻦ [ [ 0; 2πﺣﻴﺚ ; sin x
2
1 3π
-4ﺣﺪد ﻣﺠﻤﻮﻋﺔ اﻷﻋﺪاد xﻣﻦ π ; ﺣﻴﺚ ; sin x
2 2
http://arabmaths.ift.fr 13 Moustaouli Mohamed
You might also like
- etudefctsالرياضيات جدع مشترك علميDocument16 pagesetudefctsالرياضيات جدع مشترك علميadildidaNo ratings yet
- الحساب المثلثيDocument17 pagesالحساب المثلثيShakirNo ratings yet
- Talamidi.com_qoaad-fi-alhsab-almthlthi-aldrs-1Document8 pagesTalamidi.com_qoaad-fi-alhsab-almthlthi-aldrs-1khadiajanafisNo ratings yet
- الدوران في المستوى PDFDocument8 pagesالدوران في المستوى PDFRafih YahyaNo ratings yet
- الدوران في المستوىDocument8 pagesالدوران في المستوىRafih Yahya100% (1)
- درس حول الزاوية المحيطية و الزاوية المركزية - ن1 - 4 متوسطDocument9 pagesدرس حول الزاوية المحيطية و الزاوية المركزية - ن1 - 4 متوسطRire avec nousNo ratings yet
- Devoir de Maison N°3 (Collège Pilote) - Maths - 9ème - 2010-2011 - MR Faouzi GharbiDocument2 pagesDevoir de Maison N°3 (Collège Pilote) - Maths - 9ème - 2010-2011 - MR Faouzi Gharbiahmed tounsiNo ratings yet
- تحويلات في المستوىDocument9 pagesتحويلات في المستوىcherazerNo ratings yet
- دروس و تمارين حول الزوايا المركزية و الزوايا المحيطيةDocument9 pagesدروس و تمارين حول الزوايا المركزية و الزوايا المحيطيةنصيحة كل يومNo ratings yet
- مبرهنة طالس و تطبيقاتهاDocument32 pagesمبرهنة طالس و تطبيقاتهاAbdelaziz Ben MarzoukNo ratings yet
- رباعيات الأضلاع PDFDocument2 pagesرباعيات الأضلاع PDFÑôü RàNo ratings yet
- 1er-St Exama s3Document1 page1er-St Exama s3grandoNo ratings yet
- DM 3AC-S2-2Document1 pageDM 3AC-S2-2Mohammed JattaNo ratings yet
- الزوايا الحاصلة عن تقاطع مستقيمين متوازيين مع مستقيمDocument2 pagesالزوايا الحاصلة عن تقاطع مستقيمين متوازيين مع مستقيمsouissi_mohsenNo ratings yet
- Cours Maths 1college 18Document6 pagesCours Maths 1college 18Youssef ZentarNo ratings yet
- التعيين في المستويDocument25 pagesالتعيين في المستويAbdelaziz Ben Marzouk100% (1)
- اصلاح السلسلة 5-السهل الممتنع في هندسة التاسعةDocument4 pagesاصلاح السلسلة 5-السهل الممتنع في هندسة التاسعةNaouel FitouriNo ratings yet
- Série d'Exercices - Math العلاقات القياسية في المثلث القائم - 9ème (2011-2012) Mr Mouajria HattabDocument2 pagesSérie d'Exercices - Math العلاقات القياسية في المثلث القائم - 9ème (2011-2012) Mr Mouajria HattabARRAKI MOUNIRNo ratings yet
- 7.C.3 13.14Document1 page7.C.3 13.14Muhammed TǎiëbNo ratings yet
- الإمتحان الوطني الموحد للبكالوريا مادة الفيزياء والكيمياء الدورة العادية 2007 شعبة علوم رياضية أ و ب مع التصحيحDocument11 pagesالإمتحان الوطني الموحد للبكالوريا مادة الفيزياء والكيمياء الدورة العادية 2007 شعبة علوم رياضية أ و ب مع التصحيحMERYEM HAMRITINo ratings yet
- كراستي في تمارين و مواضيع محلولة في ميكانيك السنة الأولى باكDocument39 pagesكراستي في تمارين و مواضيع محلولة في ميكانيك السنة الأولى باكamrn.cerineNo ratings yet
- الزاوية المكونة من متوازيان وقاطعDocument5 pagesالزاوية المكونة من متوازيان وقاطعHalima SaouiNo ratings yet
- الزاوية المكونة من متوازيان وقاطعDocument5 pagesالزاوية المكونة من متوازيان وقاطعHalima SaouiNo ratings yet
- Physics 2mtm20 1trim2Document2 pagesPhysics 2mtm20 1trim2Amel HbNo ratings yet
- Physics 2mtm20 1trim2Document2 pagesPhysics 2mtm20 1trim2Amel HbNo ratings yet
- Physics 2se20 1trim1Document2 pagesPhysics 2se20 1trim1Zouaoua SlimaneNo ratings yet
- 2014NS PC (WWW - Pc1.ma) PDFDocument7 pages2014NS PC (WWW - Pc1.ma) PDFMajed GharibNo ratings yet
- سلسلة تمارين متوازي الأضلاع للسنة أولى إعدادي PDFDocument2 pagesسلسلة تمارين متوازي الأضلاع للسنة أولى إعدادي PDFZoos FaireNo ratings yet
- تقايس المثلثاتDocument2 pagesتقايس المثلثاتmaher mzoughiNo ratings yet
- ExerotDocument3 pagesExerotayoubnetwebNo ratings yet
- Cours Maths 1college 19Document7 pagesCours Maths 1college 19Youssef ZentarNo ratings yet
- Exama s3Document3 pagesExama s3Fatima MezianNo ratings yet
- 7.C.4 13.14 PDFDocument1 page7.C.4 13.14 PDFtorkitaherNo ratings yet
- التناظر المركزيDocument2 pagesالتناظر المركزيmaher mzoughiNo ratings yet
- Exloi NewDocument8 pagesExloi NewYoussef El BidaouiNo ratings yet
- Physics 1sci18 3trim1a8Document2 pagesPhysics 1sci18 3trim1a8Amel HbNo ratings yet
- Dzexams 3as Physique E1 20151 776606Document5 pagesDzexams 3as Physique E1 20151 776606Eléonore ElsaNo ratings yet
- Physics 3as14 1trim3 PDFDocument5 pagesPhysics 3as14 1trim3 PDFboudahNo ratings yet
- Dzexams 3as Physique E1 20151 776606Document5 pagesDzexams 3as Physique E1 20151 776606Eléonore ElsaNo ratings yet
- Physics 3as14 1trim3 PDFDocument5 pagesPhysics 3as14 1trim3 PDFboudah100% (1)
- Jodada 2AC Math-المتجهات-والازاحةDocument6 pagesJodada 2AC Math-المتجهات-والازاحةAyoub KadriNo ratings yet
- Maalam Fi MostaouaDocument2 pagesMaalam Fi Mostaouatanger-foot@hotmail.comNo ratings yet
- Examens National 2bac Physique Chimie PC 2014 NDocument11 pagesExamens National 2bac Physique Chimie PC 2014 NhjkmmNo ratings yet
- F404 Math3 L05Document8 pagesF404 Math3 L05passwo rdNo ratings yet
- وظيفة منزلية رقم 4Document2 pagesوظيفة منزلية رقم 4Khaoula AngeNo ratings yet
- اختبار شامل في الناقليةDocument1 pageاختبار شامل في الناقليةZakaria BelhadjNo ratings yet
- سلسلة التحولات المقرونة بتفاعلات حمض-قاعدةDocument1 pageسلسلة التحولات المقرونة بتفاعلات حمض-قاعدةAbdel Ghafour ElkttauiNo ratings yet
- 0063Document1 page0063Harakat ElhoucineNo ratings yet
- الحساب المتجهيDocument5 pagesالحساب المتجهيcherazerNo ratings yet
- PC - Devoir4 tr2 2010 2011Document1 pagePC - Devoir4 tr2 2010 2011khalid el yacoubi100% (1)
- الحساب المتجهيDocument5 pagesالحساب المتجهيBouhcine BelkhouadNo ratings yet
- الحساب المتجهي PDFDocument5 pagesالحساب المتجهي PDFBouhcine BelkhouadNo ratings yet
- الجداء السلميDocument7 pagesالجداء السلميOumaima BoukentarNo ratings yet
- جذاذة المثلث القائم الزاوية والدائرة الثانية إعدادي ـ نموذج 1Document6 pagesجذاذة المثلث القائم الزاوية والدائرة الثانية إعدادي ـ نموذج 1Youness SghirNo ratings yet
- Dab Abe Cad Aeb: Abc Acb BacDocument1 pageDab Abe Cad Aeb: Abc Acb BacChahbouni FatiNo ratings yet
- Cours - Math Cours - 7ème (2011-2012) MR Makram Trabelsi 4Document8 pagesCours - Math Cours - 7ème (2011-2012) MR Makram Trabelsi 4bibo sellNo ratings yet
- Rxjrsjyrdmyfxjyfxjyrx 00987Document22 pagesRxjrsjyrdmyfxjyfxjyrx 00987HvbbbvNo ratings yet
- ف م 2الدورة 1 للاولىDocument1 pageف م 2الدورة 1 للاولىcherazerNo ratings yet
- لتانيات ف م2 الدورة2Document1 pageلتانيات ف م2 الدورة2cherazerNo ratings yet
- التالتة الدورة2 ف م 1Document1 pageالتالتة الدورة2 ف م 1cherazerNo ratings yet
- للاولىف م ا2لدورة 2Document1 pageللاولىف م ا2لدورة 2cherazerNo ratings yet
- المستقيم في المستوىDocument9 pagesالمستقيم في المستوىcherazerNo ratings yet
- تحويلات في المستوىDocument9 pagesتحويلات في المستوىcherazerNo ratings yet
- المعادلات و المتراجحات من الدرجة الاولى و الثانيةDocument5 pagesالمعادلات و المتراجحات من الدرجة الاولى و الثانيةcherazer67% (3)
- عموميات حول الدوال العدديةDocument13 pagesعموميات حول الدوال العدديةcherazer50% (4)
- ensnombالرياضيات جدع مشترك علميDocument5 pagesensnombالرياضيات جدع مشترك علميadildida100% (1)
- تحويلات في المستوىDocument9 pagesتحويلات في المستوىcherazerNo ratings yet
- النظمـــــــــــاتDocument4 pagesالنظمـــــــــــاتcherazer100% (1)
- المجموعة IN و مبادئ في الحسابياتDocument4 pagesالمجموعة IN و مبادئ في الحسابياتkhilo1981100% (2)
- الترتيب في RDocument8 pagesالترتيب في RcherazerNo ratings yet
- الحـــدوديـــــــاتDocument4 pagesالحـــدوديـــــــاتcherazerNo ratings yet
- الإحصاءDocument6 pagesالإحصاءcherazerNo ratings yet
- الامتحان التجريبي في الاجتماعيات دورة يناير 2011 3 إعداديDocument3 pagesالامتحان التجريبي في الاجتماعيات دورة يناير 2011 3 إعداديcherazerNo ratings yet
- الحساب المتجهيDocument5 pagesالحساب المتجهيcherazerNo ratings yet
- 2me Compostion IslamiqueDocument1 page2me Compostion IslamiquecherazerNo ratings yet
- الإسقاطDocument7 pagesالإسقاطcherazerNo ratings yet
- الإحصاءDocument6 pagesالإحصاءcherazerNo ratings yet
- الامتحان التجريبي في التربية الإسلامية دورة يناير 2011 3 إعداديDocument2 pagesالامتحان التجريبي في التربية الإسلامية دورة يناير 2011 3 إعداديcherazerNo ratings yet
- PolutionDocument2 pagesPolutioncherazerNo ratings yet
- 2me Compostion IslamiqueDocument1 page2me Compostion IslamiquecherazerNo ratings yet
- 2me Compotion PhilosophDocument1 page2me Compotion PhilosophcherazerNo ratings yet
- 3em Composition MathematiquesDocument4 pages3em Composition MathematiquescherazerNo ratings yet
- Corection 3em Composition MathematiquesDocument5 pagesCorection 3em Composition MathematiquescherazerNo ratings yet
- CombustionDocument1 pageCombustioncherazerNo ratings yet
- 2 ReosourceDocument1 page2 ReosourcecherazerNo ratings yet