You might also like
- Problema 1 (Percentiles) : Rendimiento Lengua F FDocument51 pagesProblema 1 (Percentiles) : Rendimiento Lengua F FLucia BarrajonNo ratings yet
- IE 2011 Problemas Propuestos 3 Seleccion de AlternativasDocument6 pagesIE 2011 Problemas Propuestos 3 Seleccion de Alternativasfrancisca gonzalezNo ratings yet
- Limite de Un SumatoriaDocument2 pagesLimite de Un SumatoriaJosué David Regalado LópezNo ratings yet
- Universidad de El Salvador Plan de Estudio Licenciatura en MatematicaDocument3 pagesUniversidad de El Salvador Plan de Estudio Licenciatura en MatematicajonyNo ratings yet
- Apuntes Universitarios Analisis NumericoDocument135 pagesApuntes Universitarios Analisis NumericoPaola0% (1)
- Apuntes U2Document19 pagesApuntes U2carlos parraNo ratings yet
- 2.diferencias Divididas y Neville PDFDocument14 pages2.diferencias Divididas y Neville PDFDiego MancillaNo ratings yet
- Problemas Resueltos de Algebra Lineal - RubiñosDocument153 pagesProblemas Resueltos de Algebra Lineal - RubiñosAnonymous unHFWYTFNo ratings yet
- Actividad Previa 1Document6 pagesActividad Previa 1Marisol OsunaNo ratings yet
- Guia3-Recta Normal y TangenteDocument2 pagesGuia3-Recta Normal y TangenteJimmyJhonFernandezZavaletaNo ratings yet
- Quiz EstadisticaDocument6 pagesQuiz EstadisticaKAROLNo ratings yet
- Ecuacion de La Recta Codigo LatexDocument4 pagesEcuacion de La Recta Codigo LatexGabriela PinzonNo ratings yet
- Integrales de Las Funciones TrascendentalesDocument10 pagesIntegrales de Las Funciones TrascendentalesJeison AvilaNo ratings yet
- Integrales-Dobles CorregidoDocument22 pagesIntegrales-Dobles CorregidoJuan DavidNo ratings yet
- Examen Final Metodos NumericosDocument8 pagesExamen Final Metodos NumericosmariamininaNo ratings yet
- Guia de Ejercicios Distribución de FrecuenciaDocument11 pagesGuia de Ejercicios Distribución de FrecuenciaJshua Gimenez100% (2)
- Taller 4 Ecuaciones Exponenciales y LogaritmincasDocument5 pagesTaller 4 Ecuaciones Exponenciales y LogaritmincasAlis AvilezNo ratings yet
- Quiz 1 Act 5 Ecuaciones DiferencialesDocument5 pagesQuiz 1 Act 5 Ecuaciones DiferencialesRodrigo SiabatoNo ratings yet
- Quiz Metodos NumericosDocument15 pagesQuiz Metodos NumericosCarlos CarmNo ratings yet
- Costo CapitalizadoDocument5 pagesCosto CapitalizadoHarvis NoriegaNo ratings yet
- 7 Fichas Refuerzo Expresiones AlgebraicasDocument2 pages7 Fichas Refuerzo Expresiones Algebraicasbrandox__1980100% (1)
- Cuadro Comparativo 3.2 Clasificacion de Los Sistemas de EcuacionesDocument5 pagesCuadro Comparativo 3.2 Clasificacion de Los Sistemas de EcuacionesManuel García AcostaNo ratings yet
- Integracion Con Condiciones InicialesDocument2 pagesIntegracion Con Condiciones InicialesDavid RamirezNo ratings yet
- Problemas de InterpolacionDocument2 pagesProblemas de InterpolacionFabian Chaparro AbrilNo ratings yet
- Aplicaciones Tir IncrementalDocument1 pageAplicaciones Tir IncrementalArely Jazmin Diaz CarrilloNo ratings yet
- Fase 6 - Cuestionario 3 - Diferenciación e Integración Numérica y EDOJohntDocument4 pagesFase 6 - Cuestionario 3 - Diferenciación e Integración Numérica y EDOJohntJohnmaGutierrezNo ratings yet
- Algebra LinealDocument41 pagesAlgebra LinealMigue VillaNo ratings yet
- Funciones Lineales, Ejercicios.Document4 pagesFunciones Lineales, Ejercicios.nelsonNo ratings yet
- UES-Contenido Tema 1 Matemáticas PDFDocument12 pagesUES-Contenido Tema 1 Matemáticas PDFElia María Hernández25% (4)
- Método de MellinDocument10 pagesMétodo de MellinPedro Anibal Mendoza LuichoNo ratings yet
- Algebra LinealDocument96 pagesAlgebra LinealMarlon CastroNo ratings yet
- Calculo Integral (Unidad 4)Document26 pagesCalculo Integral (Unidad 4)Itzel Vidaña RosasNo ratings yet
- MCVV1 - U1 - A3 - JomeDocument10 pagesMCVV1 - U1 - A3 - Jomejuan mezaNo ratings yet
- Formas CuadráticasDocument19 pagesFormas CuadráticasFederico Castello RojoNo ratings yet
- Matemática BorrosaDocument89 pagesMatemática BorrosaJuanma GallardoNo ratings yet
- Cuestionario1 ManuelAyasoDocument9 pagesCuestionario1 ManuelAyasoManuel Ayaso100% (1)
- Ex 1 2019 Anunciado Solucion PDFDocument23 pagesEx 1 2019 Anunciado Solucion PDFJeremy J CruzNo ratings yet
- Ineres AnteDocument10 pagesIneres AnteAna Karen Calamani FloresNo ratings yet
- Variables AleatoriasDocument5 pagesVariables AleatoriasRoberto Carlos Sanchez Aguilar100% (1)
- Polinomios PDFDocument3 pagesPolinomios PDFMariano Lucas Salguero EdelmanNo ratings yet
- Composición de FuncionesDocument3 pagesComposición de FuncionesIvan MirandaNo ratings yet
- Conceptos Diseño de Procesos de SeparaciónDocument13 pagesConceptos Diseño de Procesos de SeparaciónOscar Lora GuerreroNo ratings yet
- Espacio BidimensionalDocument58 pagesEspacio BidimensionalRichard Romero SembreraNo ratings yet
- 3eso Soluciones Tema00Document7 pages3eso Soluciones Tema00lipinaparespeNo ratings yet
- Problemas Geometría AnalíticaDocument4 pagesProblemas Geometría AnalíticaIvan NarvaezNo ratings yet
- Juegos 14-I El Valor de ShapleyDocument4 pagesJuegos 14-I El Valor de ShapleyJose Jesus Gonzales EstrellaNo ratings yet
- PowerPoint SucesionesDocument17 pagesPowerPoint Sucesionesjunior asis jimenezNo ratings yet
- Calculo IDocument11 pagesCalculo IRony ReyesNo ratings yet
- Estadística Inferencial Ii FormularioDocument12 pagesEstadística Inferencial Ii FormularioNoraNo ratings yet
- 8 Operaciones Con Funciones PDFDocument35 pages8 Operaciones Con Funciones PDFEliseo BvNo ratings yet
- TALLER DesDocument10 pagesTALLER DesFundacion Sire100% (3)
- DiagonalizacionDocument18 pagesDiagonalizacionBecky RamirezNo ratings yet
- Tarea 1 Modulo 3 Semana 1Document35 pagesTarea 1 Modulo 3 Semana 1Remberto Manuel Regino HoyosNo ratings yet
- Relacion CalculoDocument6 pagesRelacion CalculoElvis Vargas CastroNo ratings yet
- INECUACIONESDocument11 pagesINECUACIONESRenzo RamosNo ratings yet
- Tema 5 Calculo IDocument9 pagesTema 5 Calculo ICarlos Tarqui GuillenNo ratings yet
- Capitulo 2Document65 pagesCapitulo 2Ricardo MondragonNo ratings yet
- Inventarios 2010Document23 pagesInventarios 2010Oscar Castro MuñozNo ratings yet
- Pi Gestion de ProyectosDocument8 pagesPi Gestion de ProyectosWalter GomezNo ratings yet
- Preguntas IODocument1 pagePreguntas IOWalter GomezNo ratings yet
- Ges Proy Tic 2011 12Document11 pagesGes Proy Tic 2011 12Ignacio NavarreteNo ratings yet
- Ambient AlDocument9 pagesAmbient AlWalter GomezNo ratings yet
- Ejemplo de Valor GanadoDocument5 pagesEjemplo de Valor GanadoCarla Jiron NuñezNo ratings yet
- Mod4 2Document20 pagesMod4 2Walter GomezNo ratings yet
- Fue en Un Pueblo Con MarDocument1 pageFue en Un Pueblo Con MarWalter GomezNo ratings yet
- Manual UbuntuDocument32 pagesManual Ubuntustavros5000No ratings yet
- Guia 10eDocument19 pagesGuia 10eIvan Alfonso ClimacoNo ratings yet
- CTS Un Poco de DialecticaDocument5 pagesCTS Un Poco de DialecticaWalter GomezNo ratings yet
- Capitulo VDocument6 pagesCapitulo VWalter GomezNo ratings yet
- Manifiesto para Una Vida Libre de DineroDocument297 pagesManifiesto para Una Vida Libre de DineroRodrigo Andres Tapia Moyano100% (1)
- Re Glade Orop A Rapers U AdirDocument5 pagesRe Glade Orop A Rapers U AdirjosetantonioNo ratings yet
- Resumen Sistema Operativo IDocument10 pagesResumen Sistema Operativo IWalter GomezNo ratings yet
- Manual WinedtDocument41 pagesManual WinedtJor WenNo ratings yet
- Metodología de La Investigación: Profesor: Alumno: AñoDocument42 pagesMetodología de La Investigación: Profesor: Alumno: AñoWalter GomezNo ratings yet
- TP SO2Document23 pagesTP SO2Walter GomezNo ratings yet
- Herramientas y Tácticas de Relaciones PúblicasDocument24 pagesHerramientas y Tácticas de Relaciones PúblicasWalter GomezNo ratings yet
- Manual de html5 en Español PDFDocument11 pagesManual de html5 en Español PDFsuflususNo ratings yet
- Capitulo ViiDocument13 pagesCapitulo ViiWalter GomezNo ratings yet
- Capitulo ViDocument12 pagesCapitulo ViWalter GomezNo ratings yet
- 52 Ejercicios Resueltos en PseudocodigoDocument31 pages52 Ejercicios Resueltos en PseudocodigoEr MurazorNo ratings yet
- Temas ParcialesDocument1 pageTemas ParcialesWalter GomezNo ratings yet
- Capitulo IvDocument16 pagesCapitulo IvWalter GomezNo ratings yet
- Capitulo IiDocument17 pagesCapitulo IiWalter GomezNo ratings yet
- Capitulo IDocument10 pagesCapitulo IWalter GomezNo ratings yet
- T7 - 05e TranspaDocument126 pagesT7 - 05e TranspaWalter GomezNo ratings yet
- TP Analisis NumericoDocument18 pagesTP Analisis NumericoWalter GomezNo ratings yet
- Curriculum - Vitae - Leandro - Solìs para Enviar 2023 Carina FernandezDocument2 pagesCurriculum - Vitae - Leandro - Solìs para Enviar 2023 Carina FernandezDon SolísNo ratings yet
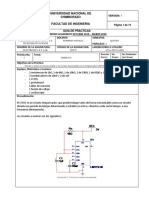
- Guía de Prácticas 555Document10 pagesGuía de Prácticas 555Jamil CrisNo ratings yet
- Maestro Catalogo Abril Lima PDFDocument24 pagesMaestro Catalogo Abril Lima PDFFRANCISCO CUBA H.No ratings yet
- Examen Final de GeologiaDocument9 pagesExamen Final de GeologiaKarGia Sanchez YarlequeNo ratings yet
- Instrumentos de EvaluacionDocument5 pagesInstrumentos de EvaluacionclaudiasilvahdezNo ratings yet
- Proyecto CaremtDocument8 pagesProyecto CaremtYoi ZamoraNo ratings yet
- Distribución Del Gas de CamiseaDocument5 pagesDistribución Del Gas de CamiseaChristian VeramendiNo ratings yet
- Ingles 3Document14 pagesIngles 3Aime MartinezNo ratings yet
- Temario Oposiciones 2012 Geo e HistDocument2 pagesTemario Oposiciones 2012 Geo e HistSamanelliNo ratings yet
- Orientaciones para Observar y Describir La Clase de MatemáticasDocument5 pagesOrientaciones para Observar y Describir La Clase de MatemáticasCarlos AyalaNo ratings yet
- Motores de Corriente AlternaDocument27 pagesMotores de Corriente AlternaHelvin Loren Campos Castillo100% (1)
- Bloque Iii 1.1Document7 pagesBloque Iii 1.1Maria Elizabeth Uyana CalvaNo ratings yet
- TBC Plan de CharlaDocument7 pagesTBC Plan de CharlaLizeth RíosNo ratings yet
- Conflictos Armados de AfricaDocument75 pagesConflictos Armados de AfricaTedeprint OlanchitoNo ratings yet
- Disfagia Fases ImagenesDocument20 pagesDisfagia Fases Imagenesanon-162539100% (4)
- 2008-CAR-Valoracion Economica de Las Reserva Forestal Protector A Bosque Oriental de BogotaDocument78 pages2008-CAR-Valoracion Economica de Las Reserva Forestal Protector A Bosque Oriental de BogotaCarlos Humberto Zambrano EscamillaNo ratings yet
- Mushoku Tensei v19 (DaimonX)Document306 pagesMushoku Tensei v19 (DaimonX)luis lezama100% (1)
- Planeación - TerpelDocument2 pagesPlaneación - Terpelcarolinaariza1089No ratings yet
- Acto de Comercio y Contabilidad Mercantil NicaraguaDocument2 pagesActo de Comercio y Contabilidad Mercantil Nicaraguahellboy14ddNo ratings yet
- La Tercera OlaDocument2 pagesLa Tercera OlaEren JaegerNo ratings yet
- El Iton Abakua y Su Universalidad SimbolDocument20 pagesEl Iton Abakua y Su Universalidad SimbolLucas Beluzo BarrionuevoNo ratings yet
- La DiscriminaciónDocument29 pagesLa DiscriminaciónYohana RafaellaNo ratings yet
- Imec 2s-2013 Print Vf13 Env1Document11 pagesImec 2s-2013 Print Vf13 Env1ggs1991_gNo ratings yet
- Ejemplos Tipos de Instrumentos PúblicosDocument3 pagesEjemplos Tipos de Instrumentos PúblicosKevin TorresNo ratings yet
- El Proceso Administrativo Según Varios AutoresDocument4 pagesEl Proceso Administrativo Según Varios AutoresDelverNo ratings yet
- Streptococcus PneumoniaeDocument2 pagesStreptococcus PneumoniaeIsac LimacheNo ratings yet
- Gerencia Final5Document21 pagesGerencia Final5Lucía RomeroNo ratings yet
- Stein - Lima Obrera, 1900 1930, Tomo IIDocument282 pagesStein - Lima Obrera, 1900 1930, Tomo IIK100% (4)
- AZamora SociologíenelcampoeducativoDocument5 pagesAZamora SociologíenelcampoeducativoHéctor Ramos100% (1)
- 3ro Sec. Quimica 29-04-20Document4 pages3ro Sec. Quimica 29-04-20Adher Eddy Quispe CalcinaNo ratings yet