You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Master Ride 150 Manual de Serviços (Ingles) TRES150 PDFDocument255 pagesMaster Ride 150 Manual de Serviços (Ingles) TRES150 PDFCharles SaraivaNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- T Cross Online BrochureDocument21 pagesT Cross Online BrochureTettsNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Perfect Tool To Expand Your Shop'S Tire Business!: Mdmax Tpms Diagnostic Tool Obdii Module For Maxtpms $447Document16 pagesThe Perfect Tool To Expand Your Shop'S Tire Business!: Mdmax Tpms Diagnostic Tool Obdii Module For Maxtpms $447Jamie MiddletonNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Index ChillDocument95 pagesIndex Chillreezqee100% (1)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- BCS WS CS BZ 250Document3 pagesBCS WS CS BZ 250GabrielGrecoNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- 735, 740 and 740E Electrical System Articulated Truck: Machine Harness Connector and Component LocationsDocument2 pages735, 740 and 740E Electrical System Articulated Truck: Machine Harness Connector and Component LocationsMiguel Bustamante100% (3)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Samsung Ue40f8000sl Ue46f8000sl Ue55f8000sl Ue65f8000sl Ue75f8000sl Chassis U90a PDFDocument77 pagesSamsung Ue40f8000sl Ue46f8000sl Ue55f8000sl Ue65f8000sl Ue75f8000sl Chassis U90a PDFSiengNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- ATC500 (BMW X5 2003-06) : Revision 07/2013Document2 pagesATC500 (BMW X5 2003-06) : Revision 07/2013JanneLaukkanenNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Clevo D610S D620S D630S NotebookDocument91 pagesClevo D610S D620S D630S NotebookCaptain444No ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- Worcester DT20RF Mk1 Programmer Installation and Servicing InstructionsDocument20 pagesWorcester DT20RF Mk1 Programmer Installation and Servicing Instructionsdatec11111No ratings yet
- Supercap Leveler PDFDocument11 pagesSupercap Leveler PDFCazimir BostanNo ratings yet
- Electronics Engineering Mastery Test 7 ECE Pre-Board PDFDocument29 pagesElectronics Engineering Mastery Test 7 ECE Pre-Board PDFXyNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Breaker UL1066PrintDocument362 pagesBreaker UL1066PrintGaurav MaithilNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Oferta KR 805-3g Kd1624Document6 pagesOferta KR 805-3g Kd1624Denisson Lopes Monteiro100% (1)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Udall SystemDocument6 pagesUdall SystemPaulo BurceNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Advanced Ionization Smoke Detectors: Protection SystemsDocument6 pagesAdvanced Ionization Smoke Detectors: Protection SystemsVicente BuenconsejoNo ratings yet
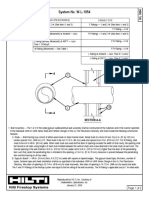
- W-L-1054 Pipe Through Gyp Board AssemblyDocument2 pagesW-L-1054 Pipe Through Gyp Board AssemblyJason StelleNo ratings yet
- GME TAR Book Comp WiseDocument117 pagesGME TAR Book Comp WiseOm Prakash RajNo ratings yet
- Type TBJ: ThermocoupleDocument2 pagesType TBJ: ThermocoupleRajishkumar RadhakrishnanNo ratings yet
- Maintain stand-alone solar PV systemsDocument14 pagesMaintain stand-alone solar PV systemsEdmund YoongNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Fakulti Teknologi Kejuruteraan Mekanikal Dan Pembuatan Universiti Teknikal Malaysia MelakaDocument6 pagesFakulti Teknologi Kejuruteraan Mekanikal Dan Pembuatan Universiti Teknikal Malaysia Melakaa syukzNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Hardlock Set Screw: AdvantagesDocument4 pagesHardlock Set Screw: AdvantagesJayden BarnesNo ratings yet
- TRI-MODE HEAT DETECTOR BUILT-IN SHORT-CIRCUIT PROTECTIONDocument2 pagesTRI-MODE HEAT DETECTOR BUILT-IN SHORT-CIRCUIT PROTECTIONjelson paulNo ratings yet
- Ebara Pump Catalog DW DW VOX New PDFDocument12 pagesEbara Pump Catalog DW DW VOX New PDFMaker PhạmNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Severe Duty Water Cannon Styles 3491 & 3492 Electric & Hydraulic Disassembly/Assembly Service Repair Procedure Australian OnlyDocument16 pagesSevere Duty Water Cannon Styles 3491 & 3492 Electric & Hydraulic Disassembly/Assembly Service Repair Procedure Australian OnlyJL Z AvilesNo ratings yet
- BY320P 150wDocument2 pagesBY320P 150wIngeniería y Proyectos IG-PROJETNo ratings yet
- Chapter 27 - CircuitsDocument18 pagesChapter 27 - CircuitsVV CepheiNo ratings yet
- User Manual: 3.6KW/5.6KW Solar Inverter / ChargerDocument82 pagesUser Manual: 3.6KW/5.6KW Solar Inverter / ChargerStLisNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Onkyo TX-NR646Document132 pagesOnkyo TX-NR646gcataNo ratings yet
- Mack Euro4 GU Final ETM 2-13-11TOCDocument11 pagesMack Euro4 GU Final ETM 2-13-11TOCfabioNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)