You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Southbound API communication between SDN controller and network switchesDocument6 pagesSouthbound API communication between SDN controller and network switchesHoai Duc HoangNo ratings yet
- SKP06N60Document16 pagesSKP06N60KosloppNo ratings yet
- Master Logic 200 Specifications and Technical DataDocument68 pagesMaster Logic 200 Specifications and Technical DatagayaseshaNo ratings yet
- Chapter 3 Security Architecture PDFDocument34 pagesChapter 3 Security Architecture PDFdgeeklordNo ratings yet
- OmegaDocument7 pagesOmegaSuzanne KiteNo ratings yet
- SSED - Solved Problems For Chapter 5Document7 pagesSSED - Solved Problems For Chapter 5MINH NGUYỄN THẾNo ratings yet
- 419925main - ITS-HB - 0040Document94 pages419925main - ITS-HB - 0040Murottal QuranNo ratings yet
- Ergonomics in Game Controllers and ConsolesDocument5 pagesErgonomics in Game Controllers and ConsolesAlex GregorieNo ratings yet
- Basic Operation of AccuTOFDocument63 pagesBasic Operation of AccuTOFFernando Torres PérezNo ratings yet
- U2 Activity1 A-BDocument2 pagesU2 Activity1 A-BFELIX ROBERT VALENZUELANo ratings yet
- AFFIDAVIT OF ONE AND THE SAME PERSON - FRM EmailDocument2 pagesAFFIDAVIT OF ONE AND THE SAME PERSON - FRM EmailAnna Ray Eleanor De GuiaNo ratings yet
- Crop Yield Prediction Using Random Forest AlgorithmDocument11 pagesCrop Yield Prediction Using Random Forest AlgorithmVj KumarNo ratings yet
- It Lecture 2Document23 pagesIt Lecture 2Muhammad Ali MasoodNo ratings yet
- CH-SIK-COAX-02 SpecificationDocument5 pagesCH-SIK-COAX-02 SpecificationDuong NathanNo ratings yet
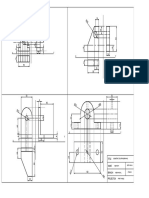
- ISO ORTHO ModelDocument1 pageISO ORTHO Modelavishal ramNo ratings yet
- Training Devices and Addressing ......................................................................... 1-2Document12 pagesTraining Devices and Addressing ......................................................................... 1-2Julian David Arevalo GarciaNo ratings yet
- Computer Integrated Manufacturing Cat 1Document58 pagesComputer Integrated Manufacturing Cat 1Abid YusufNo ratings yet
- Daikin Inverter Air Cooled Screw ChillerDocument14 pagesDaikin Inverter Air Cooled Screw Chillerfiqrinovel100% (1)
- List of Units Registered With STPI NoidaDocument12 pagesList of Units Registered With STPI Noidasingh princeNo ratings yet
- Analysis of Stock Market Cycles With Fbprophet Package in Python PDFDocument10 pagesAnalysis of Stock Market Cycles With Fbprophet Package in Python PDFcidsant50% (2)
- COMPARISON OF SORTING TECHNIQUES FOR DYNAMIC DATADocument40 pagesCOMPARISON OF SORTING TECHNIQUES FOR DYNAMIC DATAZubair AhmadNo ratings yet
- 1020-Amdocs Placement Paper - 2Document1 page1020-Amdocs Placement Paper - 2AdityakshkNo ratings yet
- Jaguar XJS Help by Kirby PalmDocument201 pagesJaguar XJS Help by Kirby Palmrexgary100% (5)
- Sigcse 18Document6 pagesSigcse 18masterhacksNo ratings yet
- BRKSPG 2116Document104 pagesBRKSPG 2116Daniel VieceliNo ratings yet
- Assignment - 1 HCI: Task - 1Document3 pagesAssignment - 1 HCI: Task - 1Education materialNo ratings yet
- Querying The Schema's Using Xspath in XML Language: T. Vamsi Vardhan Reddy, D.V. Subbaiah. M.Tech, (PH.D)Document5 pagesQuerying The Schema's Using Xspath in XML Language: T. Vamsi Vardhan Reddy, D.V. Subbaiah. M.Tech, (PH.D)IOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNo ratings yet
- Graph Theory Modeling ErrataDocument6 pagesGraph Theory Modeling ErrataAnonymous IHf491dNo ratings yet
- Melaka SPM Trial 2010 Biology (W Ans) 1-3Document2 pagesMelaka SPM Trial 2010 Biology (W Ans) 1-3Ana GoonNo ratings yet