You might also like
- Message Authentication For Can Bus and Autosar Software ArchitectureDocument135 pagesMessage Authentication For Can Bus and Autosar Software ArchitecturebitzabladeNo ratings yet
- AutoSAR MethodologyDocument19 pagesAutoSAR Methodologyestraj1954No ratings yet
- Com Stack Configuration PDFDocument99 pagesCom Stack Configuration PDFkakathi100% (1)
- Autosar SWS RteDocument1,132 pagesAutosar SWS RteLucas RiveraNo ratings yet
- Object Oriented Programming With C++Document2 pagesObject Oriented Programming With C++Dreamtech PressNo ratings yet
- CANoe ProductInformation EN PDFDocument53 pagesCANoe ProductInformation EN PDFratnamsNo ratings yet
- Design Process Hardware Autosar: Present Problems The Autosar StandardDocument3 pagesDesign Process Hardware Autosar: Present Problems The Autosar StandardJnsk SrinuNo ratings yet
- Uds Info Poster v2 PDFDocument1 pageUds Info Poster v2 PDFPrasanna VenkatesanNo ratings yet
- Adaptive Cruise Control Seminar: Sensors, Controllers & Cooperative SystemsDocument21 pagesAdaptive Cruise Control Seminar: Sensors, Controllers & Cooperative Systemspradeep nayakNo ratings yet
- Security and Safety in Embedded ApplicationsDocument14 pagesSecurity and Safety in Embedded ApplicationsLinh Lê QuangNo ratings yet
- ECU State Manager Module Development and Design For Automotive Platform Software Based On Autosar 4.0Document6 pagesECU State Manager Module Development and Design For Automotive Platform Software Based On Autosar 4.0Gigi CostelusNo ratings yet
- Continuously Variable Transmission: LD College of EngeneeringDocument16 pagesContinuously Variable Transmission: LD College of Engeneeringswapnil pandeNo ratings yet
- Automotive Telematics: 1.0 Executive SummaryDocument7 pagesAutomotive Telematics: 1.0 Executive SummaryRaghav NevatiaNo ratings yet
- PIC MicrocontrollerDocument27 pagesPIC Microcontrollermuthai100% (1)
- 10 Real-Life Applications of Embedded SystemsDocument14 pages10 Real-Life Applications of Embedded SystemsYash V100% (1)
- Vehicle Diagnostic with AUTOSAR: Implementing CAN Transport ProtocolDocument30 pagesVehicle Diagnostic with AUTOSAR: Implementing CAN Transport Protocolyoubest2No ratings yet
- Basics of automotive electronics: Understanding controller area networks (CANDocument11 pagesBasics of automotive electronics: Understanding controller area networks (CANkrishaNo ratings yet
- Ap3213610 TriCore AUDO NG BootloaderDocument38 pagesAp3213610 TriCore AUDO NG BootloaderlndyaBhaiNo ratings yet
- T-Dplat, TATA ELXSI Diagnostics Platform: Prem Mohan Nair & Sreeraj ADocument5 pagesT-Dplat, TATA ELXSI Diagnostics Platform: Prem Mohan Nair & Sreeraj Acoolman729No ratings yet
- Accelerating Motor Control Design For Functional Safety PDFDocument11 pagesAccelerating Motor Control Design For Functional Safety PDFLuu TinhNo ratings yet
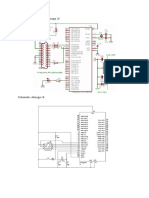
- AVR Atmega 16 Minimum System Schematic USB2serial Downloader STK 200Document3 pagesAVR Atmega 16 Minimum System Schematic USB2serial Downloader STK 200Geovani Vanta OrlandoNo ratings yet
- Intelligent Vehicle Systems-Automotive ElectronicsDocument80 pagesIntelligent Vehicle Systems-Automotive ElectronicssaavanakumarNo ratings yet
- Enclosure Design Bud - Handbook PDFDocument28 pagesEnclosure Design Bud - Handbook PDFRajesh Sivasankaran100% (1)
- Rao & Naidu Engineering College: Topic: Embedded Systems SUB: Automation of CarsDocument9 pagesRao & Naidu Engineering College: Topic: Embedded Systems SUB: Automation of Carsapi-19799369100% (1)
- Identification & Mitigation of Potential Failures of Automotive Hvac Air Management System Using Failure Mode & Effects AnalysisDocument8 pagesIdentification & Mitigation of Potential Failures of Automotive Hvac Air Management System Using Failure Mode & Effects Analysisashishmechengg31No ratings yet
- Automotive Application Guide 2014 - BR PDFDocument60 pagesAutomotive Application Guide 2014 - BR PDFbnc1100% (1)
- Autosar Pro ConsDocument8 pagesAutosar Pro ConsYaseen YaseenNo ratings yet
- H Da Barth Functional Safety On MulticoreDocument23 pagesH Da Barth Functional Safety On Multicores.b.v.seshagiri1407No ratings yet
- PID Control ToolkitDocument6 pagesPID Control ToolkitRobin PathakNo ratings yet
- Diagnosis For in Vehicle NetworksDocument26 pagesDiagnosis For in Vehicle NetworksSayyedNo ratings yet
- Introduction To Canbus: Jason Mccomb FitasDocument15 pagesIntroduction To Canbus: Jason Mccomb FitasMike100% (1)
- AIRBAGS! Technical ManualDocument13 pagesAIRBAGS! Technical Manualhagar18No ratings yet
- Road Accident Prevention Using OpenCVDocument4 pagesRoad Accident Prevention Using OpenCVInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- VR For The Automotive Industry (Harsh)Document9 pagesVR For The Automotive Industry (Harsh)harsh19021996No ratings yet
- Dspace-Paper Hil Overview Waeltermann e 160405 PDFDocument14 pagesDspace-Paper Hil Overview Waeltermann e 160405 PDFPranay VermaNo ratings yet
- Lybra Airbag - 97 2003 PDFDocument6 pagesLybra Airbag - 97 2003 PDFMarcoMadalenoNo ratings yet
- IT Architecture CarDocument32 pagesIT Architecture CarfaabdalNo ratings yet
- Functional Safety Management Aspects in Testing of Automotive Safety Concern SystemsDocument4 pagesFunctional Safety Management Aspects in Testing of Automotive Safety Concern SystemssnehanagendraNo ratings yet
- RehanDocument27 pagesRehanRehan Khan0% (1)
- Controlling A Brushed DC Motor With An ST6265C or ST6260C MCU-CD00003822Document14 pagesControlling A Brushed DC Motor With An ST6265C or ST6260C MCU-CD00003822dcesentherNo ratings yet
- Presentation On Automotive Sensors: Presented BYDocument36 pagesPresentation On Automotive Sensors: Presented BYTarun BansalNo ratings yet
- Shuvra Das - Modeling For Hybrid and Electric Vehicles Using Simscape-Morgan & Claypool Publishers (2021)Document219 pagesShuvra Das - Modeling For Hybrid and Electric Vehicles Using Simscape-Morgan & Claypool Publishers (2021)Borislav BrnjadaNo ratings yet
- Fault Tolerance in Automotive Systems - ReportDocument10 pagesFault Tolerance in Automotive Systems - ReportJagat RathNo ratings yet
- ESP Electronic Stability Program: Seminar Presentation OnDocument18 pagesESP Electronic Stability Program: Seminar Presentation OnPravin KangneNo ratings yet
- Embedded System in AutomobilesDocument42 pagesEmbedded System in AutomobilesManpreet SinghNo ratings yet
- Autonomous Car: A.Sivanagaraju P.Naga SudhakarDocument8 pagesAutonomous Car: A.Sivanagaraju P.Naga SudhakarSiva NagarajuNo ratings yet
- HIL IntroductionDocument13 pagesHIL IntroductionMinh NguyenNo ratings yet
- Embedded System in Automobiles Seminar ReportDocument18 pagesEmbedded System in Automobiles Seminar ReportDeepak DevarajanNo ratings yet
- Self-Driving GuidanceDocument36 pagesSelf-Driving GuidanceJohana BhuiyanNo ratings yet
- AU201 SI Engines and CombustionDocument3 pagesAU201 SI Engines and CombustionvaisakmctNo ratings yet
- Improvised Guard For Next Level Security Automated Vehicle Security System Using Artificial Intelligence and Convolutional Neural NetworkDocument5 pagesImprovised Guard For Next Level Security Automated Vehicle Security System Using Artificial Intelligence and Convolutional Neural NetworkInternational Journal of Innovative Science and Research Technology100% (4)
- CSW - White Paper - Automotive - The Use of Multi-Core Processors in The Automotive IndustryDocument5 pagesCSW - White Paper - Automotive - The Use of Multi-Core Processors in The Automotive IndustryRudrappa ShettiNo ratings yet
- 25977-Automobile Sensors May Usher in Self Driving Cars PDFDocument6 pages25977-Automobile Sensors May Usher in Self Driving Cars PDFSandrawarman BalasundramNo ratings yet
- Lesson19 Autosar PDFDocument170 pagesLesson19 Autosar PDFBura RoxanaNo ratings yet
- Autonomous Cars Embedded Systems PDFDocument7 pagesAutonomous Cars Embedded Systems PDFAswin PrEmrajNo ratings yet
- Von Neumann vs Harvard architecturesDocument4 pagesVon Neumann vs Harvard architecturesAmeenNo ratings yet
- Social Media Marketing in IndiaDocument23 pagesSocial Media Marketing in IndiaYash MandaliaNo ratings yet
- ZXT 120 User Manual - V1.4 - 20130604Document29 pagesZXT 120 User Manual - V1.4 - 20130604Frensel PetronaNo ratings yet
- Mechanical Engineering MSC Bulletin 2017Document92 pagesMechanical Engineering MSC Bulletin 2017IrfanAhmadNo ratings yet
- Internship ReportDocument16 pagesInternship ReportKavyesh NairNo ratings yet
- List of Presentation Topics For Class XIDocument1 pageList of Presentation Topics For Class XIchandni1972No ratings yet
- MS4101 Individual Assignment 2022Document2 pagesMS4101 Individual Assignment 2022Shauna DeveryNo ratings yet
- Assignment 3Document5 pagesAssignment 3kevin0% (2)
- DevLIVE PresentationDocument53 pagesDevLIVE PresentationGeneva LozadaNo ratings yet
- Precios MayoDocument230 pagesPrecios Mayoeuronet_seNo ratings yet
- Autonomous Vehicles RRLDocument8 pagesAutonomous Vehicles RRLDominique LopenaNo ratings yet
- Action Plans and EU Acquis Progress Report 2023 WEBDocument212 pagesAction Plans and EU Acquis Progress Report 2023 WEBRaza KandicNo ratings yet
- KS En465 - Ex2000 7 PDFDocument11 pagesKS En465 - Ex2000 7 PDFzhao haohaoNo ratings yet
- TTI BUndlingDocument2 pagesTTI BUndlingFebri RawlinsNo ratings yet
- Chlorination General SpecsDocument8 pagesChlorination General Specsraghuwanshi12No ratings yet
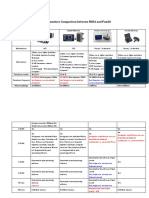
- Main Parameters Comparison Between MIRA and Pundit: A1040 MIRA A1020 MIRA Lite Pundit Live Array Pro Pundit 250 ArrayDocument3 pagesMain Parameters Comparison Between MIRA and Pundit: A1040 MIRA A1020 MIRA Lite Pundit Live Array Pro Pundit 250 ArrayAsep RifkyNo ratings yet
- HB2300 ProGrafNT PG - Konfig enDocument78 pagesHB2300 ProGrafNT PG - Konfig enBojan MilovanovicNo ratings yet
- HCI Designquestions AakashDocument2 pagesHCI Designquestions Aakashvijay1vijay2147No ratings yet
- Electrical Safety Analyzer: 6Huylfh0DqxdoDocument52 pagesElectrical Safety Analyzer: 6Huylfh0Dqxdoservice serviceNo ratings yet
- Anushka Saha CVDocument2 pagesAnushka Saha CVabhishekroyitNo ratings yet
- Logistics and Supply Chain Management Unit-3Document24 pagesLogistics and Supply Chain Management Unit-3AkhiNo ratings yet
- Xray Generation TroubleshootingDocument50 pagesXray Generation TroubleshootingLuis BattaNo ratings yet
- سوالات فصل پنجمDocument2 pagesسوالات فصل پنجمshadab BenawarNo ratings yet
- Alseca Innovation Mar2021 15Document20 pagesAlseca Innovation Mar2021 15Gabriel BodeaNo ratings yet
- Mastering Apache Spark PDFDocument663 pagesMastering Apache Spark PDFchandra prakash VermaNo ratings yet
- Roads in MozambiqueDocument17 pagesRoads in MozambiqueGladys Joyce FaustinoNo ratings yet
- Adcmxl1021-1 - Sensor Analogic 1 Eixos FFT - Ideia de Fazer Do Acell Analog Um Digital Usando Adxl1002Document42 pagesAdcmxl1021-1 - Sensor Analogic 1 Eixos FFT - Ideia de Fazer Do Acell Analog Um Digital Usando Adxl1002FabioDangerNo ratings yet
- ZXDD01 P1500 Installation GuideDocument9 pagesZXDD01 P1500 Installation GuideJose Samuel Alva Ancón100% (1)
- (Delta Power) Esaa250-Haa Series r00 - VNPT NetDocument5 pages(Delta Power) Esaa250-Haa Series r00 - VNPT NetSangyup LeeNo ratings yet
- Tan Emily Sooy Ee 2012 PDFDocument323 pagesTan Emily Sooy Ee 2012 PDFMuxudiinNo ratings yet
- Newlester PhilipsDocument49 pagesNewlester PhilipsCarlos D MauroNo ratings yet