You might also like
- Handbook of Ultra-Wideband Short-Range Sensing: Theory, Sensors, ApplicationsFrom EverandHandbook of Ultra-Wideband Short-Range Sensing: Theory, Sensors, ApplicationsNo ratings yet
- Energy Management in Wireless Sensor NetworksFrom EverandEnergy Management in Wireless Sensor NetworksRating: 4 out of 5 stars4/5 (1)
- Distributed Energy-Efficient Clustering Algorithm For Wireless Sensor NetworksDocument7 pagesDistributed Energy-Efficient Clustering Algorithm For Wireless Sensor NetworksInternational Organization of Scientific Research (IOSR)No ratings yet
- On The Planning of Wireless Sensor Networks Energy Efficient ClusteringDocument10 pagesOn The Planning of Wireless Sensor Networks Energy Efficient ClusteringRavish RvNo ratings yet
- Sensor Selection and Precoding Strategies For Wireless Sensor NetworksDocument11 pagesSensor Selection and Precoding Strategies For Wireless Sensor Networksmskumar_meNo ratings yet
- Efficient Energy Management To Prolong Lifetime of Wireless Sensor NetworkDocument18 pagesEfficient Energy Management To Prolong Lifetime of Wireless Sensor NetworkRaghavendra RakeshNo ratings yet
- Distributed Blind Adaptive Algorithms Based OnDocument7 pagesDistributed Blind Adaptive Algorithms Based OnShock SignalNo ratings yet
- Distributed Spectrum Sensing For Cognitive Radio Systems: Claudio R. C. M. Da Silva, Brian Choi, and Kyouwoong KimDocument4 pagesDistributed Spectrum Sensing For Cognitive Radio Systems: Claudio R. C. M. Da Silva, Brian Choi, and Kyouwoong KimNiranjanWangjamNo ratings yet
- Energy-Aware Data Processing Techniques For Wireless Sensor Networks: A ReviewDocument21 pagesEnergy-Aware Data Processing Techniques For Wireless Sensor Networks: A ReviewEdwardNo ratings yet
- Optimal Multiband Joint Detection For Spectrum Sensing in Cognitive Radio NetworksDocument13 pagesOptimal Multiband Joint Detection For Spectrum Sensing in Cognitive Radio Networkssuchi87No ratings yet
- Adaptive Counting Rule For Cooperative Spectrum Sensing Under Correlated EnvironmentsDocument14 pagesAdaptive Counting Rule For Cooperative Spectrum Sensing Under Correlated Environmentssuchi87No ratings yet
- Network CodesDocument8 pagesNetwork CodesSonali DasNo ratings yet
- Detecting Seldish NodesDocument10 pagesDetecting Seldish Nodesyogesh_me_itNo ratings yet
- 2010 Connected Coverage in WSNs Based On CriticalDocument26 pages2010 Connected Coverage in WSNs Based On CriticalMohamed Hechmi JERIDINo ratings yet
- Advanced Sensing Techniques of Energy Detection in Cognitive RadiosDocument11 pagesAdvanced Sensing Techniques of Energy Detection in Cognitive RadiosManwinder SinghNo ratings yet
- New MAC Protocol For Fast Data Collection in Wireless Sensor NetworksDocument5 pagesNew MAC Protocol For Fast Data Collection in Wireless Sensor NetworksIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNo ratings yet
- Proposal of KMSTME Data Mining Clustering Method For Prolonging Life of Wireless Sensor NetworksDocument5 pagesProposal of KMSTME Data Mining Clustering Method For Prolonging Life of Wireless Sensor NetworksMladen Maki VukNo ratings yet
- Learning-Based Spectrum Sensing Time Optimization in Cognitive Radio SystemsDocument6 pagesLearning-Based Spectrum Sensing Time Optimization in Cognitive Radio Systemshshokri70No ratings yet
- Energy Aware Routing Algorithm For WSN Applications in Border SurveillanceDocument6 pagesEnergy Aware Routing Algorithm For WSN Applications in Border SurveillanceniteshsisodiyaNo ratings yet
- Estimation of The Optimal Number of Cluster-Heads in Sensor NetworkDocument8 pagesEstimation of The Optimal Number of Cluster-Heads in Sensor Networksnc_90No ratings yet
- Compressive Sensing Based Probabilistic Sensor Management For Target Tracking in Wireless Sensor NetworksDocument12 pagesCompressive Sensing Based Probabilistic Sensor Management For Target Tracking in Wireless Sensor Networksmskumar_meNo ratings yet
- Kumar-2012-An Energy Efficient Approach For Clustering in WSN Using Fuzzy Logic-International Journal of Computer ApplicationsDocument5 pagesKumar-2012-An Energy Efficient Approach For Clustering in WSN Using Fuzzy Logic-International Journal of Computer ApplicationsWira HimuraNo ratings yet
- A Novel Approach On Cognitive Radio Sensor NetworkDocument19 pagesA Novel Approach On Cognitive Radio Sensor NetworkTodor GospodinovNo ratings yet
- Energy-Efficient Range Assignment in Heterogeneous Wireless Sensor NetworksDocument6 pagesEnergy-Efficient Range Assignment in Heterogeneous Wireless Sensor NetworksZahid FaridNo ratings yet
- Cross-Layer Design For Spectrum Sensing With Selection Diversity For Cognitive Radio SystemsDocument5 pagesCross-Layer Design For Spectrum Sensing With Selection Diversity For Cognitive Radio SystemsPawanKumar BarnwalNo ratings yet
- 1303 5365 PDFDocument11 pages1303 5365 PDFkrishna mohan pandeyNo ratings yet
- Theoretical Performance and Thresholds of The Multitaper Method For Spectrum SensingDocument11 pagesTheoretical Performance and Thresholds of The Multitaper Method For Spectrum SensingAbdul RahimNo ratings yet
- Distributed Cooperative Spectrum Sensing in Cognitive Radio NetworksDocument5 pagesDistributed Cooperative Spectrum Sensing in Cognitive Radio NetworksManak WadhwaNo ratings yet
- Fuzzy Logic in WSNDocument10 pagesFuzzy Logic in WSNRudy RudyansyahNo ratings yet
- Sensors: A Qualitative Comparison of Different Logical Topologies For Wireless Sensor NetworksDocument27 pagesSensors: A Qualitative Comparison of Different Logical Topologies For Wireless Sensor Networksjamesearl_cubillasNo ratings yet
- Efficient Algorithms For Maximum Lifetime Data Gathering and Aggregation in Wireless Sensor NetworksDocument21 pagesEfficient Algorithms For Maximum Lifetime Data Gathering and Aggregation in Wireless Sensor NetworksivanNo ratings yet
- Optimal Resource Allocation For Cooperative Orthogonal Frequency Division Multiplexing-Based Cognitive Radio Networks With Imperfect Spectrum SensingDocument10 pagesOptimal Resource Allocation For Cooperative Orthogonal Frequency Division Multiplexing-Based Cognitive Radio Networks With Imperfect Spectrum SensingBARRYNo ratings yet
- Approximate Point in Triangulation (APIT) Based Localization Algorithm in Wireless Sensor NetworkDocument4 pagesApproximate Point in Triangulation (APIT) Based Localization Algorithm in Wireless Sensor NetworkIJIRSTNo ratings yet
- Power Control and Channel Allocation in Cognitive Radio Networks With Primary Users' CooperationDocument13 pagesPower Control and Channel Allocation in Cognitive Radio Networks With Primary Users' CooperationieeexploreprojectsNo ratings yet
- Energy-Constrained Cooperative Spectrum Sensing in Cognitive Radio NetworksDocument5 pagesEnergy-Constrained Cooperative Spectrum Sensing in Cognitive Radio Networkssuchi87No ratings yet
- Censoring Sensors1 PDFDocument4 pagesCensoring Sensors1 PDFRex JimNo ratings yet
- Hardware-Constrained Multi-Channel Cognitive MAC: Abstract-Open Spectrum Systems Allow Unlicensed SecondaryDocument6 pagesHardware-Constrained Multi-Channel Cognitive MAC: Abstract-Open Spectrum Systems Allow Unlicensed SecondarySatish NaiduNo ratings yet
- Sensor-Mission Assignment in Wireless Sensor Networks: ACM Transactions On Sensor Networks, Vol., No., 20, Pages 1-0??Document29 pagesSensor-Mission Assignment in Wireless Sensor Networks: ACM Transactions On Sensor Networks, Vol., No., 20, Pages 1-0??Govind GuptaNo ratings yet
- A Node Coordination Algorithm in Mobile WSN For Optimal Coverage (Camwoc)Document32 pagesA Node Coordination Algorithm in Mobile WSN For Optimal Coverage (Camwoc)buzzganeshNo ratings yet
- Sensing-Throughput Tradeoff For Cognitive Radio NetworksDocument12 pagesSensing-Throughput Tradeoff For Cognitive Radio Networkssuchi87No ratings yet
- E3 White Paper SensingDocument18 pagesE3 White Paper SensingNikhil GaikwadNo ratings yet
- Ad Hoc Networks: Pyari Mohan Pradhan, Ganapati PandaDocument12 pagesAd Hoc Networks: Pyari Mohan Pradhan, Ganapati PandaVasu PasupuletiNo ratings yet
- Data and Decision Fusion For Distributed Spectrum Sensing in Cognitive Radio NetworksDocument5 pagesData and Decision Fusion For Distributed Spectrum Sensing in Cognitive Radio Networkssuchi87No ratings yet
- 5414ijasuc02 PDFDocument9 pages5414ijasuc02 PDFVương Ngọc QuangNo ratings yet
- Wireless Nanosensor Networks For Intrabody ApplicationDocument12 pagesWireless Nanosensor Networks For Intrabody ApplicationGeneration GenerationNo ratings yet
- Throughput Analysis of Power Control B-MAC Protocol in WSNDocument13 pagesThroughput Analysis of Power Control B-MAC Protocol in WSNJohn BergNo ratings yet
- J Suscom 2017 08 001Document17 pagesJ Suscom 2017 08 001Nabiel KmNo ratings yet
- Performance of PZF and MMSE Receivers in Cellular Networks With Multi-User Spatial MultiplexingDocument12 pagesPerformance of PZF and MMSE Receivers in Cellular Networks With Multi-User Spatial MultiplexingkiranpatruduNo ratings yet
- Sensor-Survey FULLDocument9 pagesSensor-Survey FULLEdwardNo ratings yet
- Research Article: A Hybrid Node Scheduling Approach Based On Energy Efficient Chain Routing For WSNDocument12 pagesResearch Article: A Hybrid Node Scheduling Approach Based On Energy Efficient Chain Routing For WSNChaima MedhioubNo ratings yet
- Clustering in Distributed Incremental Estimation in Wireless Sensor NetworksDocument25 pagesClustering in Distributed Incremental Estimation in Wireless Sensor Networksrakesh_balija1010No ratings yet
- A Data Aggregation Approach Exploiting Spatial and Temporal Correlation Among Sensor Data in Wireless Sensor NetworksDocument5 pagesA Data Aggregation Approach Exploiting Spatial and Temporal Correlation Among Sensor Data in Wireless Sensor NetworksManno ChNo ratings yet
- Ijcse V1i4p1Document8 pagesIjcse V1i4p1ISAR-PublicationsNo ratings yet
- Adaptive Sparse Random Projections For Wireless Sensor Networks With Energy Harvesting Constraints 2015Document10 pagesAdaptive Sparse Random Projections For Wireless Sensor Networks With Energy Harvesting Constraints 2015Gopal DandimeNo ratings yet
- Maximizing The Lifetime of A Barrier of Wireless SensorsDocument12 pagesMaximizing The Lifetime of A Barrier of Wireless SensorsVeda VyasNo ratings yet
- Compusoft, 3 (4), 746-751 PDFDocument6 pagesCompusoft, 3 (4), 746-751 PDFIjact EditorNo ratings yet
- Transactions Papers: Rickard Stridh, Mats Bengtsson, and BJ Orn OtterstenDocument9 pagesTransactions Papers: Rickard Stridh, Mats Bengtsson, and BJ Orn OtterstenYuvaraj KrishnanNo ratings yet
- Full-Duplex Communications for Future Wireless NetworksFrom EverandFull-Duplex Communications for Future Wireless NetworksHirley AlvesNo ratings yet
- 04778673Document6 pages04778673Umai BalanNo ratings yet
- 05075400Document5 pages05075400Umai BalanNo ratings yet
- New Sensorless Commutation Technique For Brushless DC MotorsDocument10 pagesNew Sensorless Commutation Technique For Brushless DC MotorsUmai BalanNo ratings yet
- Video Trans-Coding in Smart Camera For Ubiquitous Multimedia EnvironmentDocument5 pagesVideo Trans-Coding in Smart Camera For Ubiquitous Multimedia EnvironmentUmai BalanNo ratings yet
- 04622849Document7 pages04622849Umai BalanNo ratings yet
- 04412015Document5 pages04412015Umai BalanNo ratings yet
- 04304268Document6 pages04304268Umai BalanNo ratings yet
- Power Management Solutions For Energy Management, Power Quality and Environment Using Battery Energy Storage SystemsDocument1 pagePower Management Solutions For Energy Management, Power Quality and Environment Using Battery Energy Storage SystemsUmai BalanNo ratings yet
- Experimental Study of A Savonius - Darrieus Wind MachineDocument11 pagesExperimental Study of A Savonius - Darrieus Wind MachineMuthu VenkateshNo ratings yet
- 04153344Document6 pages04153344Umai BalanNo ratings yet
- 01268133Document6 pages01268133Umai BalanNo ratings yet
- A Self Adaptable Intelligent Battery Charger For Portable ElectronicsDocument5 pagesA Self Adaptable Intelligent Battery Charger For Portable ElectronicsUmai BalanNo ratings yet
- The Life of IgnatiusDocument9 pagesThe Life of IgnatiusUmai BalanNo ratings yet
- Passport ECNR FormDocument3 pagesPassport ECNR Formapi-374850680% (5)
- 9709 w05 Ms 2Document5 pages9709 w05 Ms 2michael hengNo ratings yet
- NCS V5 1.0 Layer Name FormatDocument4 pagesNCS V5 1.0 Layer Name FormatGouhar NayabNo ratings yet
- New Life in Christ - Vol05 - Engl - Teacher GuideDocument29 pagesNew Life in Christ - Vol05 - Engl - Teacher GuideOliver Angus100% (1)
- The Effect of Realistic Mathematics Education Approach On Students' Achievement and Attitudes Towards MathematicsDocument9 pagesThe Effect of Realistic Mathematics Education Approach On Students' Achievement and Attitudes Towards MathematicsyusfazilaNo ratings yet
- Metric Conversion WorksheetDocument3 pagesMetric Conversion WorksheetKaiden HughesNo ratings yet
- Estimation of Measurement Uncertainty For Electrical Conductivity in WaterDocument4 pagesEstimation of Measurement Uncertainty For Electrical Conductivity in WaterMaruthi KNo ratings yet
- IELTS Materials ReadingDocument9 pagesIELTS Materials ReadingßläcklìsètèdTȜè0% (1)
- Register A Custom Table in Apps SchemaDocument5 pagesRegister A Custom Table in Apps SchemaIapps ErpSolutionsNo ratings yet
- FPA 03-A.01 Permohonan Akreditasi LP LK LI LM PUP PBADocument595 pagesFPA 03-A.01 Permohonan Akreditasi LP LK LI LM PUP PBAabimanyubawonoNo ratings yet
- Power Factor Improvement SystemDocument25 pagesPower Factor Improvement SystemBijoy SahaNo ratings yet
- A Child With Fever and Hemorrhagic RashDocument3 pagesA Child With Fever and Hemorrhagic RashCynthia GNo ratings yet
- Prototyping: by DR Sampa Unnikrishnan Yateer Creative Solutions Reachus@Yateer - In, 8971442777Document70 pagesPrototyping: by DR Sampa Unnikrishnan Yateer Creative Solutions Reachus@Yateer - In, 8971442777ShivashankarNo ratings yet
- RULE 130 Rules of CourtDocument141 pagesRULE 130 Rules of CourtalotcepilloNo ratings yet
- Different Models of EIDocument13 pagesDifferent Models of EIneena686236No ratings yet
- Sculpture and ArchitectureDocument9 pagesSculpture and ArchitectureIngrid Dianne Luga BernilNo ratings yet
- Tabulation Sheet (LABO)Document9 pagesTabulation Sheet (LABO)KetIanCotalesNo ratings yet
- Doyennés Et Granges de L'abbaye de Cluny (A. Guerreau)Document45 pagesDoyennés Et Granges de L'abbaye de Cluny (A. Guerreau)theseus11No ratings yet
- Egalitarianism As UK: Source: Hofstede Insights, 2021Document4 pagesEgalitarianism As UK: Source: Hofstede Insights, 2021kamalpreet kaurNo ratings yet
- Business Communication MCQ PDFDocument54 pagesBusiness Communication MCQ PDFHimanshu ShahNo ratings yet
- MBTI - 4 Temperaments: Guardians (SJ) Rationals (NT) Idealists (NF) Artisans (SP)Document20 pagesMBTI - 4 Temperaments: Guardians (SJ) Rationals (NT) Idealists (NF) Artisans (SP)Muhammad Fauzan MauliawanNo ratings yet
- Physics Unit 3 Practice Test Dynamics5Document5 pagesPhysics Unit 3 Practice Test Dynamics5StephanieNo ratings yet
- Glorious Mysteries 1Document5 pagesGlorious Mysteries 1Vincent safariNo ratings yet
- Arch Plan-Agner Boco (For Blue Print) - p1Document1 pageArch Plan-Agner Boco (For Blue Print) - p1Jay CeeNo ratings yet
- Jeep TJ Torque SpecsDocument4 pagesJeep TJ Torque SpecsmaulotaurNo ratings yet
- G-00-1169 - Grade Designation For Low Carbon Hot Rolled Steel Sheets Used in Automotive Applications - Rev 4Document7 pagesG-00-1169 - Grade Designation For Low Carbon Hot Rolled Steel Sheets Used in Automotive Applications - Rev 4Prince Ali50% (2)
- Ifrs 15Document24 pagesIfrs 15Madhu Sudan DarjeeNo ratings yet
- Ringleman Chart FlareDocument12 pagesRingleman Chart FlareguhadebasisNo ratings yet
- PQM Quiz FinalDocument11 pagesPQM Quiz FinalSyeda Sadaf ZahraNo ratings yet
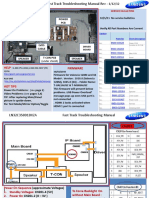
- Samsung LN55C610N1FXZA Fast Track Guide (SM)Document4 pagesSamsung LN55C610N1FXZA Fast Track Guide (SM)Carlos OdilonNo ratings yet
- 8 - Packed Tower Design-1Document65 pages8 - Packed Tower Design-1M.H vafaeiNo ratings yet