You might also like
- Manual de Smartpad en Español FullDocument26 pagesManual de Smartpad en Español FullAlfred Garcia100% (7)
- Manual Kuka 136Document56 pagesManual Kuka 13677fenixNo ratings yet
- Manual Smartpad KukaDocument25 pagesManual Smartpad Kukaherbert100% (1)
- Manual de Usuario Robot KukaDocument20 pagesManual de Usuario Robot KukaPablys Zúñiga100% (1)
- Operacion KukaDocument29 pagesOperacion KukaDiego GarzonNo ratings yet
- Work Visual 3.1Document185 pagesWork Visual 3.1Sergio Jordan Morales100% (1)
- Curso-De AvanzadaDocument25 pagesCurso-De AvanzadaiiratzokiiNo ratings yet
- Practica N. 04 KUKADocument50 pagesPractica N. 04 KUKADiego Garzon100% (1)
- Robótica programación FANUCDocument186 pagesRobótica programación FANUCPepe CastilloNo ratings yet
- Curso Nivel 1Document32 pagesCurso Nivel 1Rodrigo Mendoza100% (2)
- CURSO PROGRAMACION FANUC VAGDocument13 pagesCURSO PROGRAMACION FANUC VAGkuajarlosNo ratings yet
- Manual de Usuario KukaDocument13 pagesManual de Usuario KukascribdotreblackNo ratings yet
- Iniciación KUKADocument37 pagesIniciación KUKAMiquel100% (1)
- Manual RoboguideDocument12 pagesManual RoboguideAlberto HernandezNo ratings yet
- B-81685ES - 02 - LRM 200ibDocument226 pagesB-81685ES - 02 - LRM 200ibManuel Gil BotiaNo ratings yet
- Prog Robot KukaDocument63 pagesProg Robot Kuka77fenix100% (2)
- ManualFANUCR 30iaDocument257 pagesManualFANUCR 30iajoaquinmdz80% (5)
- KST WorkVisual EsDocument169 pagesKST WorkVisual EsEberPerez100% (2)
- Curso Nivel 2Document34 pagesCurso Nivel 2Rodrigo Mendoza100% (2)
- Apendice r41 EsDocument177 pagesApendice r41 Esiagomou100% (2)
- KST WorkVisual 50 EsDocument249 pagesKST WorkVisual 50 EsRafael100% (1)
- Programación de Robots IDocument181 pagesProgramación de Robots IMaldito SudacaNo ratings yet
- Guía Formacion Fanuc2015 PDFDocument44 pagesGuía Formacion Fanuc2015 PDFmacc4071No ratings yet
- KRC2 Ed05 BA EsDocument169 pagesKRC2 Ed05 BA EsRodrigo Mendoza100% (4)
- Manual de Usuario - KUKADocument19 pagesManual de Usuario - KUKAGaby MontesNo ratings yet
- Workbook - P1KSS8 - Programming 1 - V1 - Es PDFDocument181 pagesWorkbook - P1KSS8 - Programming 1 - V1 - Es PDFsanabria17100% (3)
- B-82584ES - 01 - LR Mate 200icDocument94 pagesB-82584ES - 01 - LR Mate 200icJuan Francisco Sanchez Massadi100% (1)
- Manual Intermedio MagnaDocument57 pagesManual Intermedio Magnaarturo100% (3)
- KST ServoGun FC 21 EsDocument131 pagesKST ServoGun FC 21 EsOmarCabrera100% (2)
- Variables de Systema - EsDocument204 pagesVariables de Systema - EsiagomouNo ratings yet
- Curso de Programación A y B para J3iCDocument240 pagesCurso de Programación A y B para J3iCRogerio Silva100% (3)
- Manual de Instrucciones de Robots Kuka KR 6 16 KR C4 Es MANTENIMIENTODocument207 pagesManual de Instrucciones de Robots Kuka KR 6 16 KR C4 Es MANTENIMIENTODaniel89% (9)
- Manual Kuka PDFDocument16 pagesManual Kuka PDFanon_393096729No ratings yet
- Ba KR 60 l45 Jet EsDocument201 pagesBa KR 60 l45 Jet EsNicolas Romero100% (1)
- Programación de Robot Kuka para PaletizadoDocument210 pagesProgramación de Robot Kuka para PaletizadoRod PicaccioNo ratings yet
- Manual para Respaldar Robot Fanuc RJDocument3 pagesManual para Respaldar Robot Fanuc RJfrancisco_gomez_131100% (3)
- Guía Del Estudiante Mtto Elect R30iA Esp - Rev 0.1.1Document199 pagesGuía Del Estudiante Mtto Elect R30iA Esp - Rev 0.1.1rx700060% (5)
- KST WorkVisual 60 EsDocument268 pagesKST WorkVisual 60 EsSanti PuyoNo ratings yet
- Ponencia Fanuc Arctool Jai2010Document31 pagesPonencia Fanuc Arctool Jai2010Jose ArandaNo ratings yet
- Power Mate I - Controlador FanucDocument10 pagesPower Mate I - Controlador Fanucmjs_cbaNo ratings yet
- Fanuc Lrmate 200id 4SDocument26 pagesFanuc Lrmate 200id 4SRaúl AnelNo ratings yet
- Simulación robot KUKA con KUKA.Sim ProDocument14 pagesSimulación robot KUKA con KUKA.Sim ProSebastianD.L.T.CastañedaNo ratings yet
- Manualejercicios PendantDocument10 pagesManualejercicios PendantRaúl AnelNo ratings yet
- Manual de Usuario de Un Proceso en Un Robot FanucDocument27 pagesManual de Usuario de Un Proceso en Un Robot FanucCaro Guerra100% (2)
- Manual F-305 (Rapid 1 S4+Instr)Document310 pagesManual F-305 (Rapid 1 S4+Instr)jfdezmtnezNo ratings yet
- Manual de Usuario ROBOGUIDEDocument16 pagesManual de Usuario ROBOGUIDEMiguel SimbañaNo ratings yet
- Prog Configuracion r41 EsDocument127 pagesProg Configuracion r41 EsiagomouNo ratings yet
- Simulación en RoboguideDocument8 pagesSimulación en RoboguideRonald RomeroNo ratings yet
- BA KR C4 Compact Es PDFDocument131 pagesBA KR C4 Compact Es PDFLuisito Miguelito Erazo100% (2)
- Manual de Formación EG - 02SPDocument83 pagesManual de Formación EG - 02SPkuka100% (1)
- Fanuc Usuario ManualDocument56 pagesFanuc Usuario ManualCarlos Galindo PerezNo ratings yet
- Lenguaje - Karel Fanuc PDFDocument27 pagesLenguaje - Karel Fanuc PDFGiuseppe VarrialeNo ratings yet
- Temario Cursos KukaDocument4 pagesTemario Cursos KukaRaul RojasNo ratings yet
- Unidad Mecánica 410ib 160 PDFDocument194 pagesUnidad Mecánica 410ib 160 PDFSergio A. A.0% (1)
- Elaboración de programas de CNC para la fabricación de piezas por corte y conformado. FMEH0209From EverandElaboración de programas de CNC para la fabricación de piezas por corte y conformado. FMEH0209No ratings yet
- MovimientosPTP-LIN-CIRCDocument8 pagesMovimientosPTP-LIN-CIRCFrankoNo ratings yet
- Informe PTPDocument13 pagesInforme PTPJacobo Javier Cáceres RodríguezNo ratings yet
- Space Mouse y Procedimiento ManualDocument4 pagesSpace Mouse y Procedimiento ManualBryan GuevaraNo ratings yet
- Manipulación Del Brazo RobóticoDocument6 pagesManipulación Del Brazo RobóticoRicardoNo ratings yet
- Configurar proyecto S7-300 y manipular robot CRS/F3 en QuestDocument3 pagesConfigurar proyecto S7-300 y manipular robot CRS/F3 en QuestJule LopezNo ratings yet
- Actividad Entregable 2Document12 pagesActividad Entregable 2Jenny Ramirez0% (1)
- Elaboración BokashiDocument8 pagesElaboración BokashiJuan Pablo BeNo ratings yet
- Resumen para Primer EncuentroDocument2 pagesResumen para Primer EncuentroFloracocoideNo ratings yet
- Repaso Programacion de ObrasDocument17 pagesRepaso Programacion de ObrasBelen ScarlethNo ratings yet
- Udemy Course Outline Template - MAKE A COPYespDocument4 pagesUdemy Course Outline Template - MAKE A COPYespcoralENo ratings yet
- Dis Comp 2018-II Sesion 3Document37 pagesDis Comp 2018-II Sesion 3Jerry Alejos GuardapucllaNo ratings yet
- Celosías acústicas CAC-300 para control de ruidoDocument1 pageCelosías acústicas CAC-300 para control de ruidoRoberto BeltránNo ratings yet
- Temario Curso Gestion de ProyectosDocument4 pagesTemario Curso Gestion de ProyectosJeffrey CerpaNo ratings yet
- Unidad de Aprendizaje - Abril 2019Document11 pagesUnidad de Aprendizaje - Abril 2019Luis HernandezNo ratings yet
- Que Son Las 5s Cuales Son Las 5s Saber Que Significa Cada Importancia de Implementar Las 5s en Nuestro TrabajoDocument5 pagesQue Son Las 5s Cuales Son Las 5s Saber Que Significa Cada Importancia de Implementar Las 5s en Nuestro TrabajoCarlos ValverdeNo ratings yet
- Circuitos RLC Con DiodosDocument12 pagesCircuitos RLC Con DiodosEdgar Roa100% (1)
- Manual Tecnico - Modulo de FacturacionDocument5 pagesManual Tecnico - Modulo de FacturacionRuben TelloNo ratings yet
- Caso 4 Bayfield Mud CompanyDocument2 pagesCaso 4 Bayfield Mud CompanyAngel Chilo PaccaraNo ratings yet
- Valvula de AnguloDocument3 pagesValvula de AnguloChristiian Aguilar67% (3)
- Informe Fisica IIIDocument5 pagesInforme Fisica IIIMathias Garcia BusichNo ratings yet
- Teoria de CimentacionesDocument43 pagesTeoria de CimentacionesJorge Flores Ramirez100% (2)
- Plantas Tratam Tomo2Document246 pagesPlantas Tratam Tomo2Derin Sepulveda Sanchez100% (2)
- Biocombustible A Partir de AlgasDocument48 pagesBiocombustible A Partir de AlgasDiego Alfredo Zavala SolisNo ratings yet
- Acumulador de SuccionDocument5 pagesAcumulador de SuccionLalex MoretaNo ratings yet
- C.V. Rosa Baca SabaDocument3 pagesC.V. Rosa Baca SabaRosita Miriam Baca SabaNo ratings yet
- Simbología norma ISA S5.1-84 instrumentaciónDocument20 pagesSimbología norma ISA S5.1-84 instrumentaciónanju139221No ratings yet
- GF Geometría Analítica 2012 PDocument125 pagesGF Geometría Analítica 2012 PAdan Aguirre LaraNo ratings yet
- Servicio de comedor y cafetería BTVDocument62 pagesServicio de comedor y cafetería BTVAxel Chachaqui MamaniNo ratings yet
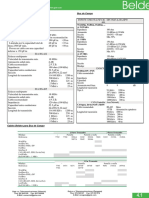
- Belden Procesos IndustrialesDocument6 pagesBelden Procesos IndustrialesedwinmenaNo ratings yet
- Tipos de DestilaciónDocument11 pagesTipos de Destilaciónjlgpsimpson100% (1)
- Unidad 1 RefrigeracionDocument16 pagesUnidad 1 RefrigeracionJavi DíazNo ratings yet
- Qué Bases Aplicarías Del Método ABCDocument1 pageQué Bases Aplicarías Del Método ABCAlejandro OlivaresNo ratings yet
- 6 - Material de Trabajo - GTH PDFDocument43 pages6 - Material de Trabajo - GTH PDFLiana SalasNo ratings yet
- La Contaminación Ambiental Está Llegando A Tales Extremos en El Mundo y en El PerúDocument10 pagesLa Contaminación Ambiental Está Llegando A Tales Extremos en El Mundo y en El PerúAnonymous 337KffNo ratings yet