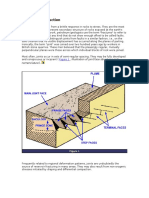
You might also like
- ANGELIER, 1994. Fault Slip Analysis and Palaeostress Reconstruction. (HANCOCK, P.L., 1994. Continental Deformation, Pp. 53-100) PDFDocument48 pagesANGELIER, 1994. Fault Slip Analysis and Palaeostress Reconstruction. (HANCOCK, P.L., 1994. Continental Deformation, Pp. 53-100) PDFDedehrbc67% (3)
- De Freitas, M. H. Watters, R. J. (1973) - Some Field Examples of Toppling Failure.Document19 pagesDe Freitas, M. H. Watters, R. J. (1973) - Some Field Examples of Toppling Failure.Yonathan MolinaNo ratings yet
- Resúmen 2Document29 pagesResúmen 2moranrubyNo ratings yet
- Fault and Joint Development in Brittle and Semi-Brittle Rock: The Commonwealth and International Library: Geology DivisionFrom EverandFault and Joint Development in Brittle and Semi-Brittle Rock: The Commonwealth and International Library: Geology DivisionNo ratings yet
- Hydraulic design of box culverts for water diversion projectDocument26 pagesHydraulic design of box culverts for water diversion projectskumarsr100% (1)
- 03 Types of Slope Failure PDFDocument14 pages03 Types of Slope Failure PDFRobby GinanjarNo ratings yet
- 03 Types of Slope Failure PDFDocument14 pages03 Types of Slope Failure PDFEd HPNo ratings yet
- Rock Slope Stability Analysis 3Document13 pagesRock Slope Stability Analysis 3Zafira EdinaNo ratings yet
- Modelling Expansive Soil FEMDocument10 pagesModelling Expansive Soil FEMmed AmineNo ratings yet
- Types of Slope FailureDocument14 pagesTypes of Slope FailureJpver1000No ratings yet
- Bearing CapacityDocument9 pagesBearing Capacitygm11hrNo ratings yet
- 9 - Applications of RM in Rock Slope EngDocument24 pages9 - Applications of RM in Rock Slope EngAlex Fuentes Montesinos100% (1)
- 240-Chapter5 Rock Engineering PDFDocument9 pages240-Chapter5 Rock Engineering PDFBrayan ItoNo ratings yet
- Joints & FracturesDocument14 pagesJoints & Fracturesfiqia nchaNo ratings yet
- Numurical Mom.' MIR Si Twl-S Tii ITY.: / / Ys IsDocument15 pagesNumurical Mom.' MIR Si Twl-S Tii ITY.: / / Ys IsSachin NaikNo ratings yet
- Capitol7 Stike Slip FaultsDocument15 pagesCapitol7 Stike Slip FaultsgabrielamariNo ratings yet
- Stability of Rock Slopes: Dr. R.S.Banshtu Associate Professor Civil Engineering Department NIT HamirpurDocument89 pagesStability of Rock Slopes: Dr. R.S.Banshtu Associate Professor Civil Engineering Department NIT HamirpurAastha SoniNo ratings yet
- SC Foundation Chapt4 A11yDocument25 pagesSC Foundation Chapt4 A11yJuan Pablo Moreno CárdenasNo ratings yet
- Chapter 5 (Slope Stability)Document42 pagesChapter 5 (Slope Stability)hero0% (2)
- salgado 版 第5章,浅基础类型,应用及沉降NEWDocument173 pagessalgado 版 第5章,浅基础类型,应用及沉降NEWyangNo ratings yet
- Lelcure 10 Slope StabilityDocument33 pagesLelcure 10 Slope Stabilityelias assefa100% (1)
- Balancing IN MAPPINGDocument34 pagesBalancing IN MAPPINGGEOLOGIST_MTA100% (1)
- Willett Et Al - 1993 - Mechanical Model For The Tectonics of Doubly Vergent Compressional OrogensDocument5 pagesWillett Et Al - 1993 - Mechanical Model For The Tectonics of Doubly Vergent Compressional OrogenscherNo ratings yet
- Lec6 - Rock Slope StabilityDocument39 pagesLec6 - Rock Slope StabilityHarry PiyoNo ratings yet
- US Army DeformationandSettlement Ch-5Document7 pagesUS Army DeformationandSettlement Ch-5Ludy RamírezNo ratings yet
- Gis-Based Kinematic Slope Stability AnalysisDocument13 pagesGis-Based Kinematic Slope Stability Analysisdaren21No ratings yet
- Structural Geology at University of Salahaddin College of EngineeringDocument4 pagesStructural Geology at University of Salahaddin College of EngineeringYousif MawloodNo ratings yet
- 9 Stability of Rock SlopesDocument8 pages9 Stability of Rock SlopesSubash PoudelNo ratings yet
- Belt Aligning RevisitedDocument6 pagesBelt Aligning RevisitedfNo ratings yet
- Rock Excavation MethodsDocument28 pagesRock Excavation MethodsPraxy Chilukula75% (4)
- Art 10.1007 s00603-012-0220-7 Block Flexural Toppling Amini PDFDocument14 pagesArt 10.1007 s00603-012-0220-7 Block Flexural Toppling Amini PDFJosé Carlos Bustamante MoralesNo ratings yet
- Structurally Controlled Instability in Tunnels PDFDocument11 pagesStructurally Controlled Instability in Tunnels PDFDian HadiyansyahNo ratings yet
- Kinematic analysis of multi-faced rock slopesDocument11 pagesKinematic analysis of multi-faced rock slopespleyvaze100% (2)
- Module 8 of GeotechDocument39 pagesModule 8 of GeotechAnore, Raecel John V.No ratings yet
- C7 Engineering Materials Metals: Prof. Dr. Rer. Nat. S. SchmauderDocument72 pagesC7 Engineering Materials Metals: Prof. Dr. Rer. Nat. S. SchmauderPratik D UpadhyayNo ratings yet
- Assignment GeologyDocument9 pagesAssignment GeologyWaleed Al MesariNo ratings yet
- Foam Fault ActivityDocument21 pagesFoam Fault ActivityAlexis FowlerNo ratings yet
- McClay, 1992-Glossary of Thrust Tectonics TermsDocument15 pagesMcClay, 1992-Glossary of Thrust Tectonics TermsEvanz LazaroNo ratings yet
- Strain EllipsoidDocument7 pagesStrain EllipsoidArkaprabha Sarkar100% (1)
- Part 5: Strike-Slip Faulting: 12.113 Structural GeologyDocument4 pagesPart 5: Strike-Slip Faulting: 12.113 Structural GeologyAlvaro MadridNo ratings yet
- Unconformities Joints Faults and FoldsDocument8 pagesUnconformities Joints Faults and FoldsTrue ConfessorNo ratings yet
- Squeezing Rock MechanismDocument12 pagesSqueezing Rock MechanismSambhav PoddarNo ratings yet
- Lesson 5 Excavations and Excavation SupportsDocument15 pagesLesson 5 Excavations and Excavation SupportsRsjBugtong100% (1)
- FoldsDocument34 pagesFoldsDheo Aldava100% (1)
- Fastener FatigueDocument14 pagesFastener FatigueiodabaotNo ratings yet
- Rock Slope Stability Analysis: Kchapter 15Document35 pagesRock Slope Stability Analysis: Kchapter 15Anonymous Gon7kIsNo ratings yet
- Properties of Rock Discontinuities ExplainedDocument41 pagesProperties of Rock Discontinuities ExplainedJordi EscorciaNo ratings yet
- Extensional Fault Arrays in Strike-Slip BasinsDocument12 pagesExtensional Fault Arrays in Strike-Slip BasinsIvan Hagler Becerra VasquezNo ratings yet
- Rekayasa PondasiDocument12 pagesRekayasa PondasiEdwin SitorusNo ratings yet
- Fault and FoldDocument42 pagesFault and FoldUtkarsh Sharma100% (1)
- Slope InstabilityDocument37 pagesSlope InstabilityGorkem AktasNo ratings yet
- Strike: The Direction (Compass Bearing) of A Line Formed by The Intersection of A RockDocument16 pagesStrike: The Direction (Compass Bearing) of A Line Formed by The Intersection of A RockGanguli Tutor RajNo ratings yet
- Module 4 - GeotechenggDocument23 pagesModule 4 - Geotechenggesguerra_arcNo ratings yet
- Rock SlopePresesntationDocument75 pagesRock SlopePresesntationJpver10000% (1)
- DRIVEN PILE DAMAGE DETECTION WITH DYNAMIC TESTINGDocument8 pagesDRIVEN PILE DAMAGE DETECTION WITH DYNAMIC TESTINGTrong TranNo ratings yet
- Technical Manual for Road Tunnel Design and ConstructionDocument13 pagesTechnical Manual for Road Tunnel Design and ConstructionTabish Beigh100% (1)
- Fault and Joint Development: In Brittle and Semi-Brittle RockFrom EverandFault and Joint Development: In Brittle and Semi-Brittle RockNo ratings yet
- Fault Zone Dynamic Processes: Evolution of Fault Properties During Seismic RuptureFrom EverandFault Zone Dynamic Processes: Evolution of Fault Properties During Seismic RuptureMarion Y. ThomasNo ratings yet
- Basic Theory of Structures: The Commonwealth and International Library: Mechanical Engineering DivisionFrom EverandBasic Theory of Structures: The Commonwealth and International Library: Mechanical Engineering DivisionRating: 4 out of 5 stars4/5 (4)
- Pier MacobDocument1 pagePier MacobskumarsrNo ratings yet
- PropertiesDocument5 pagesPropertiesskumarsrNo ratings yet
- Joint LoadsDocument7 pagesJoint LoadsskumarsrNo ratings yet
- Fee ProposalDocument2 pagesFee ProposalskumarsrNo ratings yet
- NetworklistDocument168 pagesNetworklistskumarsr0% (1)
- Catchment Area Ab Road1Document66 pagesCatchment Area Ab Road1skumarsrNo ratings yet
- Bombay Metro ModelDocument1 pageBombay Metro ModelskumarsrNo ratings yet
- 6-7-15 (Old)Document1 page6-7-15 (Old)skumarsrNo ratings yet
- Mumbai Metropolitan Region Development Authority: Request For Qualification - Technical ProposalDocument7 pagesMumbai Metropolitan Region Development Authority: Request For Qualification - Technical ProposalskumarsrNo ratings yet
- Catchment Area Ab Road1Document1 pageCatchment Area Ab Road1skumarsrNo ratings yet
- DischargesDocument4 pagesDischargesskumarsrNo ratings yet
- Chennai Metro Rail Project Tender DocumentsDocument84 pagesChennai Metro Rail Project Tender DocumentsskumarsrNo ratings yet
- Box culvert hydraulic design for Vamsadhara project phase IIDocument1 pageBox culvert hydraulic design for Vamsadhara project phase IIskumarsrNo ratings yet
- Des UdesDocument18 pagesDes UdesskumarsrNo ratings yet
- Alignment - 1of 3Document3 pagesAlignment - 1of 3skumarsrNo ratings yet
- STAAD FLOOR ANALYSIS LIVE LOAD GRILLAGEDocument7 pagesSTAAD FLOOR ANALYSIS LIVE LOAD GRILLAGEskumarsrNo ratings yet
- Br-9 - Case - 1Document109 pagesBr-9 - Case - 1skumarsrNo ratings yet
- Cast-In-Situ Slab Load & Construction Live Load On External GirderDocument1 pageCast-In-Situ Slab Load & Construction Live Load On External GirderskumarsrNo ratings yet
- STAAD Floor Analysis GrillageDocument7 pagesSTAAD Floor Analysis GrillageskumarsrNo ratings yet
- PSC Girder MDocument48 pagesPSC Girder MskumarsrNo ratings yet
- PSC Girder MDocument48 pagesPSC Girder MskumarsrNo ratings yet
- Goliath Gantry Crane Moving Load On GirderDocument1 pageGoliath Gantry Crane Moving Load On GirderskumarsrNo ratings yet
- Design Cal 8.775Document16 pagesDesign Cal 8.775skumarsrNo ratings yet
- Stressing ForcesDocument4 pagesStressing ForcesskumarsrNo ratings yet
- Contents of Design Report: SL No Description Page NoDocument1 pageContents of Design Report: SL No Description Page NoskumarsrNo ratings yet
- A B Road-Catchment Area Statement SL No Description Chainage in KMDocument1 pageA B Road-Catchment Area Statement SL No Description Chainage in KMskumarsrNo ratings yet
- p6-Pr5 - FinalDocument13 pagesp6-Pr5 - FinalskumarsrNo ratings yet
- National Highways Authority of IndiaDocument7 pagesNational Highways Authority of IndiaskumarsrNo ratings yet
- RAMP CROSS-SECTION at Near Bommanahalli JNCT - 4mDocument1 pageRAMP CROSS-SECTION at Near Bommanahalli JNCT - 4mskumarsrNo ratings yet