You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Best Practices For.... "Setting Up Email Notifications For Alerts"Document5 pagesBest Practices For.... "Setting Up Email Notifications For Alerts"piciul2010No ratings yet
- 1 9 Ipv4 NotesDocument8 pages1 9 Ipv4 Notesrabirm77No ratings yet
- Login Form in AccessDocument6 pagesLogin Form in AccessKhrstn BotinNo ratings yet
- Agile Model PDFDocument3 pagesAgile Model PDFJagadesh Ranganathan100% (1)
- Switching Models WorkbookDocument239 pagesSwitching Models WorkbookAllister HodgeNo ratings yet
- Jupiter Rising: A Decade of Clos Topologies and Centralized Control in Google's Datacenter NetworkDocument10 pagesJupiter Rising: A Decade of Clos Topologies and Centralized Control in Google's Datacenter Networkthsilva85No ratings yet
- PHP NotesDocument97 pagesPHP NotesNimya Kamal100% (1)
- HDS AMS2500 - Getting Started GuideDocument36 pagesHDS AMS2500 - Getting Started GuidejemonterrosaNo ratings yet
- Master cyber risks with an IBM-powered cybersecurity degreeDocument4 pagesMaster cyber risks with an IBM-powered cybersecurity degreehemant mohiteNo ratings yet
- Procedure-0103 Hse MeetingsDocument3 pagesProcedure-0103 Hse MeetingsIsmail Hamzah Azmatkhan Al-husainiNo ratings yet
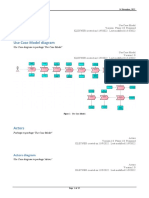
- Use Case ModelDocument19 pagesUse Case Modelkleyner farinangoNo ratings yet
- Maharashtra caste certificateDocument1 pageMaharashtra caste certificatesvpatilNo ratings yet
- Moxa Tech Note - Using DNP3 With The NPort SeriesDocument11 pagesMoxa Tech Note - Using DNP3 With The NPort SeriesDarshan SunnyNo ratings yet
- Boardcad BookDocument70 pagesBoardcad BookMax RomeroNo ratings yet
- BDC For ClassDocument7 pagesBDC For ClassSreedhar KonduruNo ratings yet
- Grcka I Srpska Prosveta Vladan DjordjevicDocument293 pagesGrcka I Srpska Prosveta Vladan DjordjevicBorisSubNo ratings yet
- WESTRACE Mark II EIDocument16 pagesWESTRACE Mark II EISampreeth Nambisan Perigini100% (2)
- Gestures - Smali CompareDocument10 pagesGestures - Smali Compareuser26453No ratings yet
- SIF Planning QuestionsDocument6 pagesSIF Planning QuestionsKamarul KhalidNo ratings yet
- 642 832Document323 pages642 832hasratraNo ratings yet
- ETABS Modeling ProcessDocument2 pagesETABS Modeling ProcessCris BandaNo ratings yet
- SDH TheoryDocument34 pagesSDH Theorythe_emp_eror100% (2)
- Floating PointsDocument31 pagesFloating PointsAbdalrhman juberNo ratings yet
- Virtual Reference ServiceDocument7 pagesVirtual Reference ServiceIbrahimh504No ratings yet
- Accessing and manipulating matrix elementsDocument3 pagesAccessing and manipulating matrix elementsJay PatelNo ratings yet
- Historical Perspectives in NursingDocument1 pageHistorical Perspectives in NursingWilliam Oz CiferNo ratings yet
- Sample - Customer Churn Prediction Python DocumentationDocument33 pagesSample - Customer Churn Prediction Python Documentationchandrakanth BNo ratings yet
- Nonlinear Regression in SPSS Predicts Medical CostsDocument5 pagesNonlinear Regression in SPSS Predicts Medical CostsAgnes FebrianaNo ratings yet
- AI Assignment Problems and TechniquesDocument4 pagesAI Assignment Problems and TechniquesJasmin YadavNo ratings yet
- Binary to Gray Code Converter VHDL CodeDocument13 pagesBinary to Gray Code Converter VHDL CodeNitish KumarNo ratings yet