Professional Documents
Culture Documents
Articulo Backstepping VIH
Uploaded by
Layimar C. Cegarra AlvaradoCopyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Articulo Backstepping VIH
Uploaded by
Layimar C. Cegarra AlvaradoCopyright:
Available Formats
Control Backstepping para el
tratamiento de pacientes contagiados por
el Virus de Inmunodeficiencia Humana (VIH-1)
Layimar Cegarra Alvarado *, Miguel Ros Bolvar **
* Universidad de Los Andes, Mrida, Venezuela (e-mail: l.cegarra@gmail.com).
** Departamento de Sistemas de Control, Facultad de Ingeniera,
Universidad de Los Andes, Mrida, Venezuela (e-mail: riosm@ula.ve)
Resumen
En el presente trabajo se presenta una ley de control que permite programar las terapias antirretrovirales en pacientes
seropositivos. El modelo considerado para el sistema es no lineal y de tercer orden. El objetivo del control consiste en
alcanzar cargas virales indetectables. Para resolver este problema se disea una ley de control por el mtodo
Backstepping, bajo el supuesto de que todos los estados pueden ser medidos. Por ltimo se sintetiza una ley de control
dinmica (con observacin de los estados), la cual recupera asintticamente la ley de control de informacin completa y
se supone la medicin exclusiva de la salida. Simulaciones digitales muestran el desempeo del sistema controlado.
Palabras claves: Control no lineal, Control Backstepping, Carga Viral, Realimentacin de la Salida, Observador.
1. Introduccin.
El virus VIH es el agente causal del SIDA, una
enfermedad caracterizada por tres fases distinguibles.
La primera fase de la infeccin por VIH es llamada
seroconversin. Inmediatamente despus de la
infeccin, el virus se multiplica en el cuerpo muy
rpido, pero las defensas se las arreglan para
rechazarlo. De 3 a 6 semanas despus del contagio del
virus, algunos pacientes presentan una serie de
sntomas parecidos a la gripe que desparecen al cabo
de unos das. En esta etapa el infectado es ms
transmisor, ya que la cantidad de virus en su
organismo es la ms alta que alcanzar. La segunda
fase es la etapa asintomtica. El virus se muestra
aparentemente inactivo durante largo periodo de
tiempo, y el paciente no presenta sntomas. Durante
esta etapa, cada da se producen varios miles de
millones de virus VIH, lo cual se acompaa de una
disminucin de las clulas T CD4+. La tercera fase es
la de infeccin crnica. En esta fase las defensas se
encuentran crticamente debilitadas. Este estado se
conoce como SIDA. No obstante, incluso en este
momento, se pueden iniciar tratamientos eficaces
aunque el paciente no haya recibido ninguno
previamente, o probar nuevas combinaciones de
frmacos. El anlisis matemtico de la enfermedad se
est estudiando desde mediados de los aos 90, lo
cual ha llevado a la proposicin de numerosos
modelos matemticos que describen la dinmica entre
el sistema inmunolgico humano y el virus, entre
ellos: Perelson y Nelson, 1999; Campello, 1999.
La planificacin para el tratamiento farmacolgico
del VIH es bsicamente un problema de control, pues
se puede abordar desde la perspectiva de un sistema
terico, en el sentido de que su perfil puede ser
definido a travs de una ley de control, que tiene por
objeto prescribir un determinado comportamiento
para un modelo matemtico dinmico que describe la
interaccin entre el sistema inmunolgico humano y
el virus. Las primeras aproximaciones fueron
dirigidas a encontrar el controlador ptimo que
permita al sistema llegar a un estado objetivo LTNP
(no progresores a largo plazo), minimizando algunas
funciones objetivos como la carga viral. Algunos
trabajos han considerado los tratamientos de dosis
constante desde un punto de vista de bifurcacin.
Recientemente se plante la sntesis de un lazo de
control utilizando la informacin de la carga viral en
el paciente, observndose que un control proporcional
es capaz de lograr el control de la enfermedad
(Palacios y Campos, 2005). Finalmente, se propuso
un esquema de control por realimentacin de estados
basado en ideas de disipacin de energa, el cual
garantiza que el comportamiento establecido por la
terapia HAART es alcanzado (Palacios y Campos,
2007). El modelo considerado para el diseo de leyes
de control es un sistema dinmico no lineal de tercer
orden formulado por Campello (Campello, 1999). En
este trabajo, se plantea disear una ley de control
Backstepping que permita la programacin del
tratamiento de antirretrovirales en pacientes
contagiados por el VIH.
2. Descripcin del modelo matemtico
El VIH es un retrovirus, cuyo material gentico est
formado por ARN (Regueiro et al., 2003). Este virus
ataca especficamente a las clulas que expresan el
receptor CD4 y entra en ellas. Una vez dentro, el virus
transforma su material gentico de cadena simple
(ARN) a uno de cadena doble (ADN) para
incorporarlo al material gentico propio del husped
(persona infectada) (URL JEDDY SIDA, 2009). A
medida que el virus se reproduce, el organismo se
hace cada vez ms vulnerable quedando disminuida
su capacidad de defensa, ante la presencia de otras
enfermedades. Para defenderse de esta produccin de
virus, el sistema inmune de una persona produce
muchas clulas CD4 diariamente. Paulatinamente el
nmero de clulas CD4 disminuye, por lo que la
persona sufre de inmunodeficiencia, lo cual puede
llevar al letal SIDA. La Prueba de la carga viral
plasmtica, es la cuantificacin del nmero de copias
del VIH que existe en el organismo; se cuentan por
unidad de volumen de sangre (URL COESIDA
JALISCO, 2009). El resultado que arroja este estudio
sirve para: diagnosticar la infeccin reciente y evaluar
el momento de inicio del tratamiento, verificar la
efectividad de los medicamentos contra el VIH y
monitorear si ha disminuido la carga viral en el
organismo. Uno de los objetivos de este tipo de
terapia es reducir la carga viral hasta un punto en que
sea indetectable (<50 copias/ml) (URL INFOSIDA,
2010). En las personas que estn recibiendo
tratamiento contra el VIH las cargas virales deben
estar siempre indetectables.
Los linfocitos CD4 son clulas defensivas del
organismo, cuya funcin es reconocer y neutralizar
toda partcula que no pertenezca al organismo.
Conforme el VIH progresa, destruye la capacidad de
estas clulas para llevar a cabo su funcin en la
eliminacin de agentes invasores, ya que el virus se
apodera de las clulas CD4, usndolas para replicarse
y matndolas en el proceso. Por esta razn las clulas
CD4 son un buen indicador del estado del sistema
inmune, pues la infeccin progresiva de estas clulas
va minando el sistema inmunolgico del individuo. El
recuento de CD4 es la medicin del nmero de
clulas CD4 que se encuentran en un milmetro
cbico de sangre (clulas/mm
3
) (URL NAM, 2009), y
es un indicador del estado de salud general y del
progreso del VIH. Este recuento de clulas CD4 es,
con la carga viral, el mejor indicador del progreso de
la infeccin. Un recuento normal de linfocitos CD4
oscila entre 500 y 1400 clulas/mm
3
de sangre, un
recuento inferior a 500 significa que el sistema
inmunolgico est daado. Si el recuento de CD4 es
inferior a 200, significa que el VIH ha progresado a
SIDA (URL INFOSIDA, 2010).
Los linfocitos T Citotxicos (CTL) pertenecen a la
lnea de los linfocitos T encargados de las funciones
efectoras de la inmunidad celular. Estos neutralizan
clulas infectadas por microorganismos intracelulares
mediante un ataque directo a las clulas infectadas,
inyectando enzimas txicas provocando su
destruccin. El papel de los CTL es crucial para
controlar el virus en sangre, pues eliminan clulas
propias infectadas por virus. Su declinacin precede a
la aparicin de la enfermedad, la viremia disminuye
cuando aparecen los CTL. El conteo normal de los
CTL es de 250 a 1500 clulas/mm
3
de sangre (URL
COESIDA JALISCO, 2009). El nmero de clulas
CTL en sangre no es una medida fiable del recuento
total de linfocitos CTL en el cuerpo. La mayora de
las clulas CTL en un momento dado se encuentran
en los diversos tejidos linfticos, y factores como la
hora del da o los alimentos pueden producir
variaciones de cientos de clulas/ml en la sangre, sin
reflejar un cambio real de la poblacin total de
linfocitos CTL.
2.1 Anlisis del modelo matemtico
El modelo del VIH (Campello, 1999), est dado por:
( ) ( )
( ) ( )
( )
1 1 10 1 1 1 3
2 2 20 2 2 2 3
3 3 1 3 4 2 3
1
2
3
x x x x x
x x x x x
x x x x x u
o |
o |
| |
=
= +
=
donde x
1
es la concentracin de linfocitos T CD4
(clulas/mm
3
), x
2
es la concentracin de linfocitos T
CTL (clulas/mm
3
), y x
3
es la carga viral
(10
7
copias/ml). Las constantes x
10
=1000clulas/mm
3
y x
20
=550clulas/mm
3
representa los valores de x
1
, x
2
que corresponden a una condicin saludable. La
entrada de control u es el tratamiento antirretroviral.
Los parmetros positivos
1
,
2
,
1
,
2
,
3
y
4
se
definen en la siguiente tabla (Espinoza et al., 2008):
Tabla 1. Parmetros del Modelo de VIH.
Descripcin Valor
1 Mortalidad natural de los
linfocitos T-CD4
0.25 1/ao
1 Infeccin de los linfocitos T CD4
por el VIH
50ml/10
7
copias ao
2 Mortalidad natural de los
linfocitos T-CTL
0.25 1/ao
2 Produccin de Linfocitos T CTL
en base al proceso de infeccin
10ml/10
7
copias ao
3 Produccin de viriones debido a
los Linfocitos T CD4 infectados
0.01mm
3
/clulas ao
4 Mortalidad de viriones debido a
Linfocitos T CTL
0.0045mm
3
/clulas ao
Las condiciones de equilibrio del sistema definido
por (1)-(3), asumiendo un valor conocido del estado
x
3
en el equilibrio (x
3eq
), est dado por:
Punto de equilibrio 1: Condicin de no Infeccin
x
3eq
=0 copias/ml
( )
( )
( )
3
1 10
3
2 20
1000 / 4
550 / 5
0 / 6
eq
eq
eq
x x celulas mm
x x celulas mm
u copias ml
= =
= =
=
Punto de equilibrio 2: Condicin de Infeccin en
ausencia de tratamiento u
eq
=0 copias/ml
( )
( )
( )
3
1
3
2
3
372.917 / 7
828.704 / 8
84078.212 / 9
eq
eq
eq
x celulas mm
x celulas mm
x copias ml
=
=
=
Punto de equilibrio 3: Condicin de Infeccin con
tratamiento. Asumiendo que la carga viral es
x
3eq
= 50 copias/ml, que representa el valor de la
carga viral indetectable, se tiene:
( )
( )
( )
3
1
3
2
999.001 / 10
551.213 / 11
375.478 / 12
eq
eq
eq
x celulas mm
x celulas mm
u copias ml
=
=
=
Fcilmente se puede verificar que, el sistema (1)-
(3) linealizado y evaluado en el punto de equilibrio 3
es controlable y observable. El objetivo del control
ser lograr que las trayectorias del sistema (1)-(3)
tiendan a un valor lo ms cercano posible al punto de
equilibrio (10)-(12).
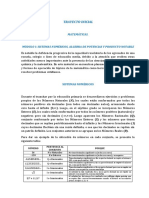
La evolucin de los estados del sistema (1)-(3) en
lazo abierto, con condiciones iniciales x
1
(0) = 1000
clulas/mm
3
, x
2
(0) = 550 clulas/mm
3
, x
3
(0) = 1000
copias/ml, se muestran en la figura 1, donde se puede
observar que los estados convergen al punto de
equilibrio 2, y que el incremento de la carga viral,
implica un decremento de las clulas CD4 y un
incremento de las clulas CTL.
Figura 1: Evolucin de los estados del modelo
(1)-(3) sin entrada de control.
0 2 4 6 8 10 12 14 16 18 20
0
100
200
300
400
500
600
700
800
900
1000
Respuesta del modelo del VIH en lazo abierto
tiempo (aos)
c
e
l u
l a
s
/
m
m
3
&
c
o
p
i a
s
/
m
l /
1
0
0
0
x1: Linfocitos CD4 (cell/mm3)
x2: Linfocitos CTL (cell/mm3)
x3: Carga Viral (copias/ml/1000)
1. Metodologa de Diseo.
1.1 Backstepping.
El control por Backstepping es un mtodo que
garantiza estabilidad, obteniendo una funcin de
Lyapunov para el sistema en lazo cerrado, cuya
derivada a lo largo de las trayectorias de dicho
sistema es negativa. En esta seccin se presenta la
metodologa de diseo propuesta por Khalil (1996); se
asume que todos los estados se encuentran disponibles
para su medicin.
Considere el sistema:
( )
( )
( ) ( ) 13
14
f g
u
q q q
= +
=
donde,
n
q e9 , e9 son los estados y ue9 es la
entrada de control. El sistema (13)-(14) puede verse
como la conexin en cascada de dos componentes, la
primera componente es (13), con como entrada, y
la segunda es el integrador (14). Asumimos que si
0, 0 u q = = y
0 =
, entonces (0) 0, f = (0) 0 g = y
0 = . Se desea disear un control por realimentacin
de estados que estabilice el sistema (13)-(14) al origen
0, q = 0 =
. Supongamos que (13) puede
estabilizarse con un control suave ( ) | q = , con
(0) 0 | = , y que se conoce una funcin de Lyapunov
suave ( ) V q , que satisface:
| | ( ) ( ) ( ) ( ) ( ) 15
V
f g W q q | q q
q
c
+ s
c
donde ( ) W q es definida positiva.
Sumando y restando ( ) ( ) g q | q en (13), y
haciendo el cambio de variables:
( ) ( ), 16 z v u | q | = =
se obtiene el sistema:
| | ( )
( )
( ) ( ) ( ) ( ) 17
18
f g g z
z v
q q q | q q = + +
=
Como f, g y | son conocidas, se puede calcular la
derivada de | :
| | ( ) ( ) ( ) 19 f g
|
| q q
q
c
= +
c
La componente (17) del sistema dado por (17)-
(18), tiene un punto de equilibrio asintticamente
estable en el origen cuando su entrada z es cero.
Considrese la Funcin de Lyapunov candidata:
( )
2
1
( , ) ( ) 20
2
a
V z V z q q = +
cuya derivada a lo largo de las trayectorias de (17)-
(18) satisface:
| |
( )
( ) ( ) ( ) ( )
( ) ( ) 21
a
V V
V f g g z zv
V
W g v z
q q | q q
q q
q q
q
c c
= + + +
c c
( c
s + +
(
c
Eligiendo:
( ) ( ) , 0 22
V
v g kz k q
q
c
= >
c
obtenemos:
( )
2
( ) 23
a
V W kz q s
que muestra que el origen 0, 0 z q = = es
asintticamente estable. Como (0) 0 | = , se concluye
que el origen 0, 0 q = = es asintticamente estable.
Sustituyendo las expresiones de v, z, | , obtenemos
el control por realimentacin del vector de estados:
| | | | ( ) ( ) ( ) ( ) ( ) 24
V
u f g g k
|
q q q | q
q q
c c
= +
c c
Est tcnica se denomina integrador Backstepping
porque el control virtual es retrocedido un
integrador para obtener el control real u. El mtodo
explicado puede aplicarse a sistemas de la forma:
( )
( )
( ) ( ) 25
( , ) ( , ) 26
a a
f g
f g u
q q q
q q
= +
= +
donde (26) no es un integrador puro sino un
integrador no lineal. La transformacin de entrada
| | ( )
1
( , ) 27
( , )
a a
a
u u f
g
q
q
=
transforma a (26) en un integrador puro
a
u = .
Tomando u
a
igual al control (24) y combinndolo
con (27) se obtiene que el control por Backstepping
para el sistema (25)-(26) es:
| |
| | ( )
1
( , ) ( ) ( )
( , )
( ) ( ) ( , ) 28
a
a
a
u f g
g
V
g k f
|
| q q q
q q
q | q q
q
c
= +
c
`
c
)
con 0 k > , y la funcin de Lyapunov total es:
| | ( )
2 1
( , ) ( ) ( ) 29
2
a
V z V q q | q = +
1.2 Ley de Control Dinmica por Realimentacin
de Salida
El problema de estabilizacin de sistemas no lineales
por realimentacin de salida ha sido ampliamente
estudiado. Una novedosa tcnica de diseo ha sido
desarrollada por Karagiannis et al., (2003). Esta
tcnica consiste en la aplicacin de un principio de
separacin, el cual establece que el problema de
regulacin propuesto se puede resolver por medio de
la solucin de dos sub-problemas. El primero se
refiere a encontrar una ley de control de informacin
completa, bajo el supuesto de que se conocen todos
los parmetros y variables del sistema. El segundo
sub-problema consiste en el diseo de una ley de
control dinmica estabilizante, por realimentacin de
salida (con estimacin de los estados no medidos).
Considere una clase de sistema de la forma:
( )
0 1
( , ) ( , )
( , ) ( , ) 30
A y u B y u
y y u y u
q q
q
= +
= +
con el estado ( , )
n p
y q e9 9 , la salida y y la entrada
de control
m
u e9 . Se asume que slo la salida est
disponible para su realimentacin.
Considere tambin una variable de desempeo
definida como:
( ) ( , ) 31 h y q =
El problema de regulacin del sistema (30)
consiste en encontrar una ley de control por
realimentacin dinmica de la salida, descrita por:
( )
( , )
( , ) 32
y
u y
q t q
o q
=
=
tal que todas las trayectorias del sistema en lazo
cerrado (30)-(32) sean acotadas y adems:
( ) lim ( ) 0 33
t
t
=
Proposicin 1: Considere un sistema descrito por
ecuaciones de la forma (30) y una variable de
desempeo definida como en (31). Suponga que:
- (A1) Existe una ley de control de informacin
completa
( )
*
( , ) 34 u y o q =
para la cual todas las trayectorias del sistema en lazo
cerrado (30)-(32) son acotadas y (36) se satisface.
Adems, el sistema (30) con ( , ( )) u y d t o q = + es
globalmente estable de entrada acotada y estado
acotado, con respecto a la entrada d(t).
- (A2) Existe una aplicacin ( ) y tal que el sistema
( )
1
( , ) ( , ) 35 z A y u y u z
x
c | |
=
|
c
\ .
es uniforme y globalmente estable para cualquier
par y, u; y adicionalmente z(t) permite que, para
cualquier par y y dado,
| | ( ) lim ( , ( )) ( , ) 36
t
y z t y o q o q
+ =
Entonces existe una ley de control dinmica de
realimentacin de salida descrita por ecuaciones de la
forma (32), que resuelve el problema de regulacin
por realimentacin de salida.
De la prueba de la Proposicin 1 (Gonzlez et al.,
2008) se tiene que si se considera el controlador
dinmico de realimentacin de salida:
( )
( , ( )) 37
w
u y M y
q
o q
=
= +
y la variable auxiliar
( )
( ) 38 z M y q q = +
La dinmica de la variable auxiliar es:
( )
1
( , ( , )) ( , ( , )) 39 z A y y z y y z z
y
o q o q
( c
= + +
(
c
y el controlador dinmico resulta:
|
( )
1
0
1
( , ( , ( )))( ( ))
( , ( , ( )))
( , ( , ( )))
( , ( , ( )))( ( ))
( , ( )) 40
M A y y M y M y
B y y M y
y y M y
y
y y M y M y
y
u y M y
q o q q
o q
o q
o q q
o q
= + +
+ +
c
+
c
c
+ +
c
= +
La suposicin (A2) de la Proposicin 1 puede ser
reemplazada por una condicin ms estricta que
garantice
( ) lim ( ) 0 41
t
z t
=
para todo y y u. Si este es el caso, q puede usarse
para construir una estimacin asinttica de los estados
no medidos .
2. Diseo del controlador Backstepping
Reescribiendo el sistema (1)-(3) como:
( )
( )
( )
( ) ( )
1 1 10 1 1 1
3
2 2 20 2 2 2
3 3 1 4 2 3
42
43
x x x x
x x
x x x x
x x x x u
o |
q
o |
| |
| | | | | |
= = = +
| | |
\ . \ . \ .
= =
se obtiene un sistema como el dado por (25)-(26),
donde:
( )
( )
( )
( ) ( )
1 10 1 1 1
2 20 2 2 2
3 1 4 2 3
( ) ; ( ) 44
( , ) ; ( , ) 1 45
a a
x x x
f x g x
x x x
f x x x x g x
o |
o |
| |
| | | |
= =
| |
\ . \ .
= =
Haciendo la transformacin de entrada (28), se
tiene:
( ) ( )
3 1 4 2 3
46
a
u u x x x | | = (
Sustituyendo (46) en (43), tenemos:
( )
( )
( )
( )
1 1 10 1 1 1
3
2 2 20 2 2 2
3
47
48
a
x x x x
x x
x x x x
x u
o |
o |
| | | | | |
= = +
| | |
\ . \ . \ .
=
Tomando a x
3
como entrada, y diseando un
control
3
( ) x x | = que estabilice al sistema en x
1
=1000
clulas/mm
3
y x
2
=550 clulas/mm
3
, se propone:
( )
3
1 1 1 1 10 2 2 2 2 20
( )
( ) ( ) 49
x x
LK x x x LK x x x
|
| |
=
= +
con L > 0, K
1
> 0, K
2
> 0; cuya derivada est dada por:
| | ( )
1 1 10 1 2 2 20 2
( ) ( 2 ) ( 2 ) 50 x L K x x K x x | | | =
La funcin de Lyapunov V(x) que se propone es:
( ) ( )
| | ( )
2 2
1 1 10 2 2 20
1 10 1 2 20 2
1
( ) ( ) ( ) 51
2
( ) ( ) 52
V x K x x K x x
V
K x x K x x
x
= +
c
=
c
Utilizando (24), se tiene que u
a
viene dada por:
( )
3 1 1 10 1 1 10 1 1
2 2 20 2 2 20 2 2
2 2
1 1 1 3 10 1 2 2 2 3 20 2
( )( ( 2 ) (1 ))
( )( ( 2 ) (1 ))
( 2 ) ( 2 ) 53
a
u Kx K x x L x x x K
K x x L x x x K
LK x x x x LK x x x x
| o
| o
| |
= + +
+ + +
+ +
con K>0.
Sustituyendo (53) en (46), se tiene que el control
por Backstepping es:
( )
3 1 4 2 3 3
1 1 10 1 1 10 1 1
2 2 20 2 2 20 2 2
2 2
1 1 1 3 10 1 2 2 2 3 20 2
( )
( )( ( 2 ) (1 ))
( )( ( 2 ) (1 ))
( 2 ) ( 2 ) 54
u x x x Kx
K x x L x x x K
K x x L x x x K
LK x x x x LK x x x x
| |
| o
| o
| |
= +
+ + +
+ +
La correspondiente funcin de Lyapunov total es:
( )
(
) ( )
2 2
3 1 1 10 2 2 20
3 1 1 1 1 10
2
2 2 2 2 20
1
( , ) ( ) ( )
2
1
( )
2
( ) 55
a
V x x K x x K x x
x LK x x x
LK x x x
|
|
= +
+ +
El sistema en lazo cerrado, utilizando la ley de
control (54) se muestra en las figuras 2, 3 y 4. En
estas simulaciones el tratamiento se inicio ao y
medio despus de la infeccin por VIH.
Figura 2: Estado x
1
y x
2
en lazo cerrado.
Figura 3: Estado x
3
en lazo cerrado.
Figura 4: Seal de Control u.
0 2 4 6 8 10 12 14 16 18 20
100
200
300
400
500
600
700
800
900
1000
Linfocitos CD4 (x1) y CTL (x2). Inicio de terapia: ao 1.5
tiempo (aos)
c
e
l u
l a
s
/
m
m
3
Linfocitos CD4
Linfocitos CTL
0 2 4 6 8 10 12 14 16 18 20
-100
0
100
200
300
400
500
600
700
800
Carga Viral (estado x3). Backstepping, Inicio terapia ao 1.5
tiempo (aos)
c
o
p
i a
s
/
m
l /
1
0
0
0
0 2 4 6 8 10 12 14 16 18 20
-0.5
0
0.5
1
1.5
2
2.5
3
3.5
x 10
6
Control U, Backstepping, Inicio terapia ao 1.5
tiempo (aos)
c
o
p
i a
s
/
m
l
3. Diseo del Observador por
Realimentacin de la Salida.
Sea el sistema (1)-(3) reescrito de la forma:
( )
| | ( )
1 1 3 1 10 1 1
2 2 3 2 20 2 2
1
3 3 3 4 3
2
0
56
0
57
x x x x
x
x x x x
x
y x x x u
x
o | o
q
o | o
| |
( ( ( (
= = = +
( ( ( (
+
(
= =
(
el cual es de la forma del sistema (30), donde:
( )
| |
1 1 3 1 10
2 2 3 2 20
0 1 3 3 4 3
0
( , ) ; ( , ) 58
0
( , ) ; ( , )
x x
A y u B y u
x x
y u u y u x x
o | o
o | o
| |
( (
= =
( (
+
= =
Sea el control por realimentacin dinmica de la
salida:
( )
( , ( )) 59
x w
u y x y o
=
= +
donde o se define como en (34),
2
( ) : y 99 se
define de acuerdo a la hiptesis (A2) y w es una nueva
seal de control. Haciendo M = I, y utilizando la
ecuacin (39), se tiene que la dinmica del sistema en
lazo cerrado, en coordenadas x, y y z es:
( )
| | ( )
| | ( )
1 1 3 1 10 1 1
2 2 3 2 20 2 2
1
3 3 3 4 3
2
1
1 1 3
3 3 4 3
2 2 3 2
0
60
0
61
0
62
0
x x x x
x
x x x x
x
y x x x u
x
x y
z x x z
x
y
o | o
o | o
| |
o |
| |
o |
( ( ( (
= = +
( ( ( (
+
(
= =
(
| c | (
|
(
c (
|
(
=
(
| + c (
|
(
c
\ .
Para que (41) sea satisfecha, se propone:
( )
1
1
3
2
2
4
( ) 63
L y
y
L y
|
|
|
|
( | |
( |
\ . (
=
(
| |
(
|
(
\ .
donde L
1
>0 y L
2
>0. Entonces, la ecuacin (35) se
puede escribir como:
( )
1
1 1 3 1 4 1 3
3
2
3 2 3 2 2 3 2
4
( 1)
64
(1 )
x L L x
z z
L x x L
|
o | |
|
|
| o |
|
| | (
+
|
(
|
(
=
|
(
+
|
(
|
\ .
El sistema (64) es uniformemente globalmente
asintticamente estable con la funcin de Lyapunov
(65):
( )
( )
( ) ( )
2 2 2 3 1 4
2 1 1 2
4 3
2 2 3
2 1 1 1 1
4
2 1 4
1 2 2 2 2
3
1 1
( ) 65
2 2
( ) (1 )
( 1) 66
V x L z L z
V x L y L z
L y L z
| | | |
| |
| |
o |
|
| |
o |
|
= +
= +
+
Eligiendo los valores de las ganancias L
1
y L
2
que
permitan ubicar los autovalores de (64) en el
semiplano izquierdo del plano complejo s, la ecuacin
(66) siempre ser definida negativa. Por lo tanto, se
satisfacen las condiciones en (A1) y (A2) y, por la
aplicacin de la Proposicin 1, se sintetiza el
estimador x
que completa la ley de realimentacin
dinmica (59), la cual se obtiene al reemplazar en la
ley de control de informacin completa (54), x por
( ) x y + :
( )
1
1 1 3
3 1
2 2
2 2 3
4
67
x L x
x
x
x L x
|
|
|
|
(
(
(
(
(
(
(
La ley de realimentacin dinmica de la salida
resulta:
1 1
1 1 3 1 4 1 3 1 1 3
3 3
2 2
3 2 3 2 2 3 2 2 2 3
4 4
1
1
3 1 10
2 20 2
2
4
( 1)
(1 )
(68)
x L L x x L x
x
L x x L x L x
L
x
u
x
L
| |
o | |
| |
| |
| o |
| |
|
| o
o |
|
( (
+
( (
( (
=
( (
+
( (
(
(
(
(
+
(
(
(
1 2
3 1 1 3 3 4 2 2 3 3 3
3 4
1 1
1 1 10 1 1 3 1 10 1 1 3
3 3
1 2
1 1 3 2 2 20 2 2 3
3 4
2 20 2
2
(1 )
2
u x L x x x L x x Kx
K x x L x L x x L x
x L x K K x x L x
L x x
| |
| |
| |
| |
| o
| |
| |
|
| |
|
o
| | | |
= +
| |
\ . \ .
| | | | | | | | |
+ + | | | |
| |
\ . \ . \ . \ . \
| | | | | | |
+
| | | |
| |
\ . \ . \ . .
( )
2 2
2 3 2 2 3
4 4
2 1 1
1 1 3 1 1 3 10 1 1 3
3 3
2 2 2
2 2 3 2 2 3 20 2 2 3
4 4
(1 )
2
2 69
L x x L x K
LK x x L x x x L x
LK x x L x x x L x
|
| |
| |
|
| |
| |
|
| |
| | | | | | | |
+ + | | | |
| |
\ . \ . \ . \ .
| | | | | |
| | |
|
\ . \ . \ .
| | | | | |
| | |
|
\ . \ . \ .
la cual logra la regulacin del sistema.
Figura 5: Estado x
1
en lazo cerrado.
Figura 6: Estado x
2
en lazo cerrado.
Figura 7: Estado x
3
en lazo cerrado.
Figura 8: Seal de Control u.
El efecto de la seal de control mostrada en la
figura 8 sobre los estados del sistema, con
3
1
(0) 950 clulas/mm , x =
3
2
(0) 500 clulas/mm x =
, se
observa en las figuras 5, 6 y 7.
4. Conclusiones
El problema de disear una ley de control para el
modelo del VIH-1, que permita la programacin del
tratamiento de antirretrovirales con el fin de mantener
la carga viral en un nivel indetectable y las
concentraciones de linfocitos CD4 y CTL en valores
normales, ha sido resuelto a travs del diseo de un
controlador Backstepping, el cual tiene como base un
observador, obtenido mediante un enfoque de
Realimentacin de Salida. Simulaciones digitales
demuestran que el controlador diseado cumple con el
objetivo de llevar y mantener la carga viral en niveles
indetectables y, las concentraciones de CD4 y CTL en
los valores deseados.
Referencias
Campello, F. (1999). Modeling the dynamics of HIV-1
and CD4 and CD8 Lymphocytes. IEEE Engineering
in Medicine and Biology, 18(1):2124.
COESIDA JALISCO. Recuperado de Para personas
que viven con VIH:
http://coesida.jalisco.gob.mx/atencion6.html
Espinoza, G., Palacios, E., Moreno, J. & Campos, D.
(2008). Output Feedback Passivity-based Control for
HIV-1 Treatment Scheduling. D.F, Mxico.
Gonzlez, O., Ros, M. & Gmez, C. (2008). Control
Adaptativo por Realimentacin de Salida del
Proceso Anaerobio de Tratamiento de Aguas
Residuales. Mrida, Venezuela.
INFOSIDA. Recuperado de: http://www.infosida.es/
bgdisplay.jhtml?itemname=cd4_and_viral_load_tests
JEDDY SIDA, Tratamiento Natural del Sida.
Recuperado de: http://www.sidaperu.com/sida.php
Karagiannis, D., Astolfi, A. y Ortega, R. (2003). Two
results for adaptive output feedback stabilization of
nonlinear systems. Automatica, 39:858866.
Khalil, H. (1996). Nonlinear Systems (2
da
ed.).
Pretince Hall.
NAM (National AIDS Manual). (2002). Recuperado
de: http://www.aidsmap.com/es/docs/12A238F7-
D452-4D08-91CD-117D8C09BFBF.asp
Palacios, E., y Campos, D. (2005). Anlisis y Control
de la Dinmica del VIH-1. D.F, Mxico.
Palacios, E., y Campos, D. (2007). Control por
Retroalimentacin de la Salida para la reduccin de
la carga viral en un modelo de VIH-1. D.F, Mxico.
Perelson, A. and Nelson, P. (1999). Mathematical
analysis of HIV-1 dynamics in vivo. SIAM, 41(1):3-
44.
Regueiro, J., Lpez, C., Gonzlez, S. & Martnez, E.
(2003). Inmunologa Biologa y patologa del
sistema inmune (3
a
ed.). Madrid: Panamericana.
0 2 4 6 8 10 12 14 16 18 20
100
200
300
400
500
600
700
800
900
1000
Linfocitos CD4 (estado x1). Backstepping, Inicio terapia ao 1.5
tiempo (aos)
c
e
l u
l a
s
/
m
m
3
Estado x1 real
Estado x1 estimado
0 2 4 6 8 10 12 14 16 18 20
500
550
600
650
700
750
800
850
900
Linfocitos CTL (estado x2). Backstepping, Inicio terapia ao 1.5
tiempo (aos)
c
e
l u
l a
s
/
m
m
3
Estado x2 real
Estado x2 estimado
0 2 4 6 8 10 12 14 16 18 20
-100
0
100
200
300
400
500
600
700
800
Carga Viral (estado x3). Backstepping, Inicio terapia ao 1.5
tiempo (aos)
c
o
p
i a
s
/
m
l /
1
0
0
0
0 2 4 6 8 10 12 14 16 18 20
0
0.5
1
1.5
2
2.5
3
3.5
x 10
6
Control U, Backstepping, Inicio de terapia: ao 1.5
tiempo (aos)
c
o
p
i a
s
/
m
l
You might also like
- Instalaciones Del EdificioDocument14 pagesInstalaciones Del EdificiopabloaraosissNo ratings yet
- MSI gf63 Thin 8rcsDocument56 pagesMSI gf63 Thin 8rcsDiego AllendesNo ratings yet
- 2 DoDocument4 pages2 DoCamila Nelida BernabeNo ratings yet
- Programando de Forma Lineal PeDocument11 pagesProgramando de Forma Lineal PeJORGE ERNESTO RONDO VALERIANONo ratings yet
- Grado 6. Guia 5-GeometriaDocument7 pagesGrado 6. Guia 5-GeometriaHernando Cuestatic50% (2)
- Desempeños Primero Sec MatematicaDocument2 pagesDesempeños Primero Sec MatematicacarlosNo ratings yet
- Capitulo 14 IT Essentials 2 Sistemas Operativos de Red - EspañolDocument54 pagesCapitulo 14 IT Essentials 2 Sistemas Operativos de Red - EspañolNicolas Madrid100% (1)
- Movimiento CircularDocument19 pagesMovimiento CircularGerardo Sarmiento60% (5)
- 4to. FIS - Guía #1 - Movimiento Circular IDocument5 pages4to. FIS - Guía #1 - Movimiento Circular IJuan Manuel50% (2)
- Quiz 1 I - Dictionary TestDocument10 pagesQuiz 1 I - Dictionary Testguait9No ratings yet
- Manual Pickit 3Document19 pagesManual Pickit 3alvaroNo ratings yet
- Física - Practica 2Document24 pagesFísica - Practica 2Ana Cristina Calderon RiosNo ratings yet
- 05 Desafios ENE 2018Document18 pages05 Desafios ENE 2018Felipe Almada OrtegaNo ratings yet
- Torres de EnfriamientoDocument7 pagesTorres de EnfriamientoMaaryloveBlaasNo ratings yet
- Calculo de Fundaciones para Instalaciones de SuperficieDocument9 pagesCalculo de Fundaciones para Instalaciones de SuperficieElmar CuellarNo ratings yet
- Aceite de CártamoDocument16 pagesAceite de Cártamokatia SotoNo ratings yet
- ANATOMIADocument3 pagesANATOMIAabigail juarezNo ratings yet
- Poblacion y Muestra PDFDocument66 pagesPoblacion y Muestra PDFGuillermoOjedaHerrera100% (2)
- Esfuerzos Debidos A Cargas AplicadasDocument14 pagesEsfuerzos Debidos A Cargas AplicadasleonardoNo ratings yet
- Problemas de Numeros Primos y Compuestos para Cuarto de SecundariaDocument3 pagesProblemas de Numeros Primos y Compuestos para Cuarto de SecundariaTito VillafaneNo ratings yet
- Proyecto Final de Laboratorio BILLARDocument10 pagesProyecto Final de Laboratorio BILLARLuis Andres Ariza Osorio100% (1)
- Uniones IntercelularesDocument15 pagesUniones IntercelularesVERA SILVANA GARAMENDI SACSARANo ratings yet
- Din 8077Document33 pagesDin 8077Cesar GonzalesNo ratings yet
- Plano Satelital OtuzcoDocument1 pagePlano Satelital OtuzcoGino Asencio AlvaradoNo ratings yet
- Matemática. Modulo I.Document14 pagesMatemática. Modulo I.Rixis AlexanderNo ratings yet
- Módulo VII Lógica Jurídica y ArgumentaciónDocument13 pagesMódulo VII Lógica Jurídica y ArgumentaciónJonatan ColliNo ratings yet
- Mercedes Benz AxorDocument3 pagesMercedes Benz Axormaximchaca67% (3)
- Ethical Hacking 4Document3 pagesEthical Hacking 4jefesecc Ip y RedesNo ratings yet
- La Membrana Celular y Los TransportesDocument9 pagesLa Membrana Celular y Los TransportesMaru VeronicaNo ratings yet
- Ventajas de La EncuestaDocument3 pagesVentajas de La Encuestapromocion2010No ratings yet