You might also like
- SAP Na ManutençãoDocument38 pagesSAP Na ManutençãoDenis FreireNo ratings yet
- Stiff A Stepbrother Romance - B.B. HamelDocument335 pagesStiff A Stepbrother Romance - B.B. HamelLuciana Viana100% (1)
- Capitulo 1 PythonDocument30 pagesCapitulo 1 PythonCristiano PrestreloNo ratings yet
- Manual - Ufcd - 9224 - Arquivo DigitalDocument60 pagesManual - Ufcd - 9224 - Arquivo Digitalsandra fernandes100% (2)
- Aplicações Eletrônicas Na Raspberry Pi 3 Programado Em Visual C# Para Windows 10 Iot CoreFrom EverandAplicações Eletrônicas Na Raspberry Pi 3 Programado Em Visual C# Para Windows 10 Iot CoreNo ratings yet
- Aprendendo Arduino: projetos práticos com sensor, LCD, motor e comunicação serialDocument48 pagesAprendendo Arduino: projetos práticos com sensor, LCD, motor e comunicação serialBruno VescoviNo ratings yet
- Antologia De Projetos No Arduino Com Display Lcd Volume VFrom EverandAntologia De Projetos No Arduino Com Display Lcd Volume VNo ratings yet
- PostgreSQL PráticoDocument123 pagesPostgreSQL PráticoAlexandre JúniorNo ratings yet
- Apostila de Linguagem de Programação I e Estrutura de Dados PDFDocument66 pagesApostila de Linguagem de Programação I e Estrutura de Dados PDFMatheus Barreto OliveiraNo ratings yet
- Desenvolvendo Projetos Modbus Com Comunicação Tcp/ip Programado No ArduinoFrom EverandDesenvolvendo Projetos Modbus Com Comunicação Tcp/ip Programado No ArduinoNo ratings yet
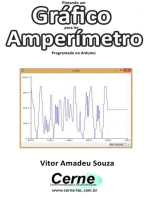
- Plotando Um Gráfico Para Ler Amperímetro Programado No ArduinoFrom EverandPlotando Um Gráfico Para Ler Amperímetro Programado No ArduinoNo ratings yet
- 01 IO - Introdução À Investigação Operacional USTMDocument15 pages01 IO - Introdução À Investigação Operacional USTMFaquira Antonio100% (1)
- Topologia rede lab R2 R1 R6 R4 R5 R3Document21 pagesTopologia rede lab R2 R1 R6 R4 R5 R3Alex Machado100% (2)
- Wildfly - ManualDocument17 pagesWildfly - ManualGeorge Souza FariasNo ratings yet
- Comandos Linux Estrutura DiretóriosDocument16 pagesComandos Linux Estrutura Diretóriosjjunior07No ratings yet
- Apostila BricscaDDocument209 pagesApostila BricscaDJonatas LampaNo ratings yet
- Integrando Advpl Com Java Usando IReport - 001Document23 pagesIntegrando Advpl Com Java Usando IReport - 001Juliana Leme PavarinaNo ratings yet
- Firewall Conceito e AplicaçãoDocument27 pagesFirewall Conceito e AplicaçãoAdeanes CoutinhoNo ratings yet
- Minicurso Criptografia-2020 Dia 2Document220 pagesMinicurso Criptografia-2020 Dia 2witian-2No ratings yet
- Explorando o WildFly 8Document20 pagesExplorando o WildFly 8Anderson KerllyNo ratings yet
- Aula 01 - Conceitos BásicosDocument42 pagesAula 01 - Conceitos BásicosMiguel BauermannNo ratings yet
- Tutorial Eclipse Tomcat StrutsDocument22 pagesTutorial Eclipse Tomcat Strutsapi-3799234No ratings yet
- Java para Programadores MainframeDocument28 pagesJava para Programadores MainframeRobson Rodrigues FreitasNo ratings yet
- Apostila DE CONTABILIDADE AVANCADA PDFDocument143 pagesApostila DE CONTABILIDADE AVANCADA PDFAndre Freire de AlmeidaNo ratings yet
- Como fui aprovada em 1o lugar no ISS-SP 2012Document24 pagesComo fui aprovada em 1o lugar no ISS-SP 2012Vitor EspinatoNo ratings yet
- PPC Cts Eletronica 2014 PDFDocument56 pagesPPC Cts Eletronica 2014 PDFJosé RobertoNo ratings yet
- Pfsense Dual Wan Router 2Document10 pagesPfsense Dual Wan Router 2João Antunes Lapa FilhoNo ratings yet
- Análise Combinatória para Os Segundos AnosDocument86 pagesAnálise Combinatória para Os Segundos AnosCarlos BraynerNo ratings yet
- Aula 01 PDFDocument59 pagesAula 01 PDFJonathas MeloNo ratings yet
- Manual Básico de StrutsDocument13 pagesManual Básico de StrutsSergio Virginio Dos SantosNo ratings yet
- Spring Boot Um Exemplo Completo - IMastersDocument7 pagesSpring Boot Um Exemplo Completo - IMastersaurelianodNo ratings yet
- Postgres 8Document18 pagesPostgres 8Felipe VieiraNo ratings yet
- Material Mpu Desenv SGBD Marcal Dominando TiDocument140 pagesMaterial Mpu Desenv SGBD Marcal Dominando TiGuga SommaNo ratings yet
- Exercicios DREDocument2 pagesExercicios DREsimuladocontabilNo ratings yet
- Simples Casa Automatizada Com RaspberryDocument62 pagesSimples Casa Automatizada Com RaspberryDaisy Andrade100% (1)
- Arquitetura de Software Baseada em ComponentesDocument29 pagesArquitetura de Software Baseada em ComponentesBruna RodriguesNo ratings yet
- Instalar Tomcat Linux Red HatDocument6 pagesInstalar Tomcat Linux Red HatgeisonrodrigoNo ratings yet
- Mapeamento Hibernate Bancos DadosDocument27 pagesMapeamento Hibernate Bancos DadosBenefrancis100% (1)
- Memorex Análise de TráfegoDocument34 pagesMemorex Análise de Tráfegopaulo1410100% (3)
- Aula 00 - Windows ServerDocument73 pagesAula 00 - Windows ServerPericlysLamonierdaSilvaNo ratings yet
- Memorex Banco de Dados Parte IIIDocument15 pagesMemorex Banco de Dados Parte IIIFelipe VieiraNo ratings yet
- Protocolos e tecnologias da camada de rede/InternetDocument109 pagesProtocolos e tecnologias da camada de rede/InternetMichel Souza100% (1)
- Laboratório 4.2 - Testes ICMP e ARPDocument13 pagesLaboratório 4.2 - Testes ICMP e ARPVitor LimaNo ratings yet
- Configuração Básica de Dispositivos, VLSM e Testes de ConectividadeDocument7 pagesConfiguração Básica de Dispositivos, VLSM e Testes de ConectividadeAntonio CorreiaNo ratings yet
- Modelo ER IntroduçãoDocument18 pagesModelo ER IntroduçãoJesué Lucas DiogoNo ratings yet
- Roteamento OSPF Lab 1Document3 pagesRoteamento OSPF Lab 1cai eletricaNo ratings yet
- Sistemas Operacionais e Arquiteturas de ProcessadoresDocument2 pagesSistemas Operacionais e Arquiteturas de ProcessadoresmalbioNo ratings yet
- Manual de Serviço HiPath 3000-5000 Versão 6.0Document1,324 pagesManual de Serviço HiPath 3000-5000 Versão 6.0valentepvh100% (2)
- SIEMENS Manual de Facilidades PDFDocument467 pagesSIEMENS Manual de Facilidades PDFsinbadfunNo ratings yet
- Filtrando Tráfego Intra-Vlan (Camada 2) - Vlan Access-Maps - CISCO VACLDocument5 pagesFiltrando Tráfego Intra-Vlan (Camada 2) - Vlan Access-Maps - CISCO VACLwillinocencioNo ratings yet
- Apostila Cups IntroDocument16 pagesApostila Cups Introapi-3699756100% (1)
- Gerencie HTTP Endpoints no SQL Server para integrar procedimentos armazenados como serviços webDocument12 pagesGerencie HTTP Endpoints no SQL Server para integrar procedimentos armazenados como serviços webFabiao Dos Santos PatrícioNo ratings yet
- Arquitetura TCP-IP - Internet Protocol PDFDocument121 pagesArquitetura TCP-IP - Internet Protocol PDFAlessandro AlvesNo ratings yet
- Redes de Computadores - Resumo de Comando para Resolver Problemas de RedeDocument11 pagesRedes de Computadores - Resumo de Comando para Resolver Problemas de RedePádua FerreiraNo ratings yet
- Apostila Banco de DadosDocument79 pagesApostila Banco de DadosInforma100% (7)
- RIP protocol configuration and operation in a small networkDocument11 pagesRIP protocol configuration and operation in a small networkJarbas CordeiroNo ratings yet
- IEEE 802 É Um Conjunto de Padrões Desenvolvidos Pelo IEEEDocument5 pagesIEEE 802 É Um Conjunto de Padrões Desenvolvidos Pelo IEEEHenrique FerreiraNo ratings yet
- Java IV - Fundamentos OODocument193 pagesJava IV - Fundamentos OOjoberth1No ratings yet
- SO Process SchedulingDocument16 pagesSO Process SchedulingJoenewwaveNo ratings yet
- Dicas de Curso para HiPath 3000Document19 pagesDicas de Curso para HiPath 3000Gleison Aparecido OnofreNo ratings yet
- Monitoramento Da Rede de A A Zabbix Daniel Bauermann PDFDocument36 pagesMonitoramento Da Rede de A A Zabbix Daniel Bauermann PDFFrederico Fernando NaguelNo ratings yet
- Desenvolvendo Uma Aplicação Cliente Servidor Com O Esp32 Programado No ArduinoFrom EverandDesenvolvendo Uma Aplicação Cliente Servidor Com O Esp32 Programado No ArduinoNo ratings yet
- Linux Configurações De Serviços De Rede Apostila TécnicaFrom EverandLinux Configurações De Serviços De Rede Apostila TécnicaNo ratings yet
- Desenvolvimento De Projetos Com Esp32 Programado Em Arduino – Volume ÚnicoFrom EverandDesenvolvimento De Projetos Com Esp32 Programado Em Arduino – Volume ÚnicoNo ratings yet
- FWD: Lembrete Da Sua Conta TIMDocument2 pagesFWD: Lembrete Da Sua Conta TIMtvpkftvkh5No ratings yet
- Bloqueie sites pornográficos e perigosos com DNS seguroDocument5 pagesBloqueie sites pornográficos e perigosos com DNS seguroprofzezinhoNo ratings yet
- Tutorial Auto MapperDocument7 pagesTutorial Auto MapperAlisson Pereira AnjosNo ratings yet
- Toxicologia in Silico - Uma Nova AbordagemDocument18 pagesToxicologia in Silico - Uma Nova AbordagemRodrigo RodriguesNo ratings yet
- Manual Calculadora HP 48g e GXDocument48 pagesManual Calculadora HP 48g e GXariostojrNo ratings yet
- 08 - Gestão Da Manutenção de Elementos Construtivos Com Auxílio Da Plataforma BimDocument8 pages08 - Gestão Da Manutenção de Elementos Construtivos Com Auxílio Da Plataforma BimEduardo BernardinoNo ratings yet
- Manutenção Preventiva e CorretivaDocument3 pagesManutenção Preventiva e CorretivaIce Man-YTNo ratings yet
- ADXL345 IntroduçãoDocument8 pagesADXL345 IntroduçãoStephen PerezNo ratings yet
- Manual de Requisitos de Sistema Solucao Ifleet DVR VeicularDocument19 pagesManual de Requisitos de Sistema Solucao Ifleet DVR VeicularDarlan Mateus SeganfredoNo ratings yet
- Guia de Release Notes do ONU GPON DM985-100 V1.3.2Document10 pagesGuia de Release Notes do ONU GPON DM985-100 V1.3.2keslleyNo ratings yet
- Concurso para operador de máquinas pesadasDocument6 pagesConcurso para operador de máquinas pesadasTKN RENATONo ratings yet
- ANMY Tabela PecasDocument147 pagesANMY Tabela Pecassilviosergio2No ratings yet
- UFV-Introdução ao MoodleDocument139 pagesUFV-Introdução ao Moodlecarnevermelha2000No ratings yet
- E-Manager Midi Maestro 10 14 Dunker 03 2021 PT-BRDocument242 pagesE-Manager Midi Maestro 10 14 Dunker 03 2021 PT-BRJonathan Willian TozzoNo ratings yet
- Simulated Annealing MetaheurísticaDocument14 pagesSimulated Annealing MetaheurísticaamoallitiNo ratings yet
- 2.3.3.4 Lab - Configuring A Switch Management AddressDocument8 pages2.3.3.4 Lab - Configuring A Switch Management Addresseng_ramossNo ratings yet
- Automatização de CréditoDocument23 pagesAutomatização de Créditoellen fotoNo ratings yet
- C++ BásicoDocument15 pagesC++ BásicoJ_o_s_e_HNo ratings yet
- StimulsoftDocument72 pagesStimulsoftAlexandre AlvesNo ratings yet
- 2019-08-009-12 - Chevrolet Novo Vectra e Vectra GTDocument2 pages2019-08-009-12 - Chevrolet Novo Vectra e Vectra GTDiego MuletNo ratings yet
- Operador/a de Manutenção Hoteleira - Vírus e Segurança InformáticaDocument29 pagesOperador/a de Manutenção Hoteleira - Vírus e Segurança InformáticaPedro RochaNo ratings yet
- NF 490Document1 pageNF 490Naldo GalesNo ratings yet
- Anatomia Esqueleto 40Document5 pagesAnatomia Esqueleto 40Miseravy XerxesNo ratings yet
- DANFE_000997248Document1 pageDANFE_000997248Willian OliveiraNo ratings yet
- Guia VB5Document279 pagesGuia VB5xandyafonsoNo ratings yet