You might also like
- U F WandlerDocument9 pagesU F Wandlerapi-3708508No ratings yet
- Einfuehrung MessgeraeteDocument6 pagesEinfuehrung MessgeraeteJulius WieprechtNo ratings yet
- V 12 - Berechnungen Von WS-GrößenDocument10 pagesV 12 - Berechnungen Von WS-GrößenGustavo VegaNo ratings yet
- Physikalische Grundlagen Der Energieübertragung Mit Gleich - Und Wechselstrom Hoher SpannungDocument30 pagesPhysikalische Grundlagen Der Energieübertragung Mit Gleich - Und Wechselstrom Hoher SpannungMichaelSchoenitzerNo ratings yet
- Bedienung Oszilloskop Agilent Für LaborDocument26 pagesBedienung Oszilloskop Agilent Für LaborFfvgNo ratings yet
- Versuch 0 EPDocument5 pagesVersuch 0 EPSyed MazharNo ratings yet
- Maxwell Gleich Un GenDocument23 pagesMaxwell Gleich Un GenAanNo ratings yet
- SteuReg - 17 07 2014Document151 pagesSteuReg - 17 07 2014phuongntlNo ratings yet
- Ee Wise 2023 Kap1Document16 pagesEe Wise 2023 Kap1Aatir AhmedNo ratings yet
- E44 ProtokollDocument12 pagesE44 ProtokollForceGripNo ratings yet
- Heat Exchanger Effectiveness CalculationDocument13 pagesHeat Exchanger Effectiveness CalculationSiva Karthikeyan.M100% (2)
- Hausarbeit ATFDocument7 pagesHausarbeit ATFmalteunland98No ratings yet
- WSTR NGeng Aufgaben 2020-03-01Document222 pagesWSTR NGeng Aufgaben 2020-03-01zn9rjqyq55No ratings yet
- Ep6 2020 1Document18 pagesEp6 2020 1Syed MazharNo ratings yet
- LA03 Laden Entladen KondensatorDocument7 pagesLA03 Laden Entladen KondensatorFl3xiNo ratings yet
- V 13 - Elemente Im WS-KreisDocument5 pagesV 13 - Elemente Im WS-KreisGustavo VegaNo ratings yet
- RTKS Aufgabenblatt W05-1Document3 pagesRTKS Aufgabenblatt W05-1MannyCalaveraNo ratings yet
- GW H 20 StudDocument17 pagesGW H 20 StudEL NoraNo ratings yet
- Kapitel 2Document42 pagesKapitel 2John Black100% (1)
- Transistor enDocument40 pagesTransistor enanton99No ratings yet
- Protokoll Physik SchaltkreiseDocument5 pagesProtokoll Physik SchaltkreiseYael MorenoNo ratings yet
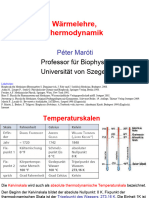
- Warmelehre+ThermodynamikDocument46 pagesWarmelehre+ThermodynamikshaynonstopNo ratings yet
- MechanikDocument13 pagesMechanikMichael BernartzNo ratings yet
- Practica 3 BDocument9 pagesPractica 3 Balexandrojz730No ratings yet
- Uebung 8Document3 pagesUebung 82r5p85ss6gNo ratings yet
- SubtrahiererDocument4 pagesSubtrahierercryto2600No ratings yet
- 1GIG Wechselstrom 2022-07-06Document73 pages1GIG Wechselstrom 2022-07-06Frank FasbenderNo ratings yet
- VL13 - 01 07 21 Hauptpunke Der VorlesungDocument17 pagesVL13 - 01 07 21 Hauptpunke Der VorlesungwawaNo ratings yet
- GE36 TPDocument7 pagesGE36 TPAhdbaba EBYNo ratings yet
- EMTLAB1Document13 pagesEMTLAB1Frederick van BenthemNo ratings yet
- UntitledDocument165 pagesUntitledDGINo ratings yet
- E FiltrageDocument5 pagesE FiltrageCadet francilienNo ratings yet
- PH11 InduktivitatDocument1 pagePH11 InduktivitatMadisonNo ratings yet
- Informieren Sie Sich Über Die Spezifikationen Für Den Kauf Eines Widerstands - AutosaveDocument10 pagesInformieren Sie Sich Über Die Spezifikationen Für Den Kauf Eines Widerstands - AutosaveScribdTranslationsNo ratings yet
- IE MessgleichrichterDocument7 pagesIE Messgleichrichterapi-3708508100% (1)
- IE-Digitale FrequenzmessungDocument9 pagesIE-Digitale Frequenzmessungapi-3708508100% (1)
- LE Zusammenfassung 4Document11 pagesLE Zusammenfassung 4Yasmin MradNo ratings yet
- Abi 03 Phys GKDocument6 pagesAbi 03 Phys GKkulin123456No ratings yet
- Physik TestDocument5 pagesPhysik Testgurpreetarora1717No ratings yet
- GleichstrommaschineDocument13 pagesGleichstrommaschineMaid DzambicNo ratings yet
- Übungsblatt 3Document3 pagesÜbungsblatt 3Yassine YahiaouiNo ratings yet
- Übungen Wechselstrom (Mit Lösungen)Document3 pagesÜbungen Wechselstrom (Mit Lösungen)ReideenNo ratings yet
- A Operationsverstaerker PDFDocument5 pagesA Operationsverstaerker PDFKarim XyzNo ratings yet
- Quantenphysik - ZusammenfassungDocument15 pagesQuantenphysik - Zusammenfassungعبدالرحمن معمرNo ratings yet
- GW H 16 StudDocument18 pagesGW H 16 StudEL NoraNo ratings yet
- Datenblatt Techem Kommunikations-Schnittstellen Für WärmezählerDocument2 pagesDatenblatt Techem Kommunikations-Schnittstellen Für Wärmezähler19donmateoscribdNo ratings yet
- Arbeitsblà Tter Netzteil Station 1 Mit Là SungDocument12 pagesArbeitsblà Tter Netzteil Station 1 Mit Là Sungwlan4alleNo ratings yet
- bwb2 2009 Exp Elektrizitt Glimmlampe LsungDocument2 pagesbwb2 2009 Exp Elektrizitt Glimmlampe LsungLê AnkanixNo ratings yet
- Zusammenfassung PhysikDocument6 pagesZusammenfassung Physikdiverses dreizehnNo ratings yet
- Wattimetro (Duewi)Document11 pagesWattimetro (Duewi)Interne TemporNo ratings yet
- 3 Messsysteme AllgemeinDocument15 pages3 Messsysteme AllgemeinBibi PanzersturmNo ratings yet
- ECG Measure With OscillocopeDocument22 pagesECG Measure With OscillocopeDramane BonkoungouNo ratings yet
- Modulation AllmendDocument6 pagesModulation AllmendAbdelilah KerouichNo ratings yet
- V3 - GleichstromstellerDocument33 pagesV3 - GleichstromstellerInes RouisNo ratings yet
- Fourierreihe Und MATLABDocument8 pagesFourierreihe Und MATLABFAN TIANNo ratings yet
- LEX16 KlausurDocument2 pagesLEX16 KlausurbobobaerNo ratings yet
- Reaktionstechnik SkriptDocument47 pagesReaktionstechnik Skriptmaster_fabsiNo ratings yet
- NTC PTCDocument7 pagesNTC PTCDaniel MaierNo ratings yet
- Spannung, Strom, Leistung und Frequenz: Kompendium Messtechnik und Sensorik, Teil 4From EverandSpannung, Strom, Leistung und Frequenz: Kompendium Messtechnik und Sensorik, Teil 4Rating: 5 out of 5 stars5/5 (1)
- Messen von Wechselgrößen: Kompendium Messtechnik und Sensorik, Teil 3From EverandMessen von Wechselgrößen: Kompendium Messtechnik und Sensorik, Teil 3Rating: 5 out of 5 stars5/5 (1)
- IE FuzzyDocument5 pagesIE Fuzzyapi-3708508No ratings yet
- IE RegelkreisDocument7 pagesIE Regelkreisapi-3708508100% (1)
- IE TemperaturmessungDocument16 pagesIE Temperaturmessungapi-3708508No ratings yet
- IE MagnetfeldsensorenDocument5 pagesIE Magnetfeldsensorenapi-3708508No ratings yet
- IE-KFZ SensorenDocument11 pagesIE-KFZ Sensorenapi-3708508100% (1)
- IE MessgleichrichterDocument7 pagesIE Messgleichrichterapi-3708508100% (1)
- IE IEC BusDocument7 pagesIE IEC Busapi-3708508No ratings yet
- Messung Von L Und CDocument6 pagesMessung Von L Und Capi-3708508No ratings yet
- IE DehnungsmessstreifenDocument9 pagesIE Dehnungsmessstreifenapi-3708508100% (6)
- IE PC MesstechnikDocument12 pagesIE PC Messtechnikapi-3708508100% (1)
- Thyristor, Diac Und TriacDocument9 pagesThyristor, Diac Und Triacapi-3708508100% (4)
- IE-Digitale FrequenzmessungDocument9 pagesIE-Digitale Frequenzmessungapi-3708508100% (1)
- IE-Fast Fourier TransformationDocument16 pagesIE-Fast Fourier Transformationapi-3708508100% (1)
- IE PC MesstechnikDocument4 pagesIE PC Messtechnikapi-3708508No ratings yet
- IE DigitalspeicherscopeDocument13 pagesIE Digitalspeicherscopeapi-3708508No ratings yet
- RCL Nach IDocument2 pagesRCL Nach Iapi-3708508No ratings yet
- IE ElektrosicherheitDocument20 pagesIE Elektrosicherheitapi-3708508100% (1)
- GPB AbsolutismusDocument4 pagesGPB Absolutismusapi-3708508No ratings yet
- TINF Theorie BaumgartnerDocument204 pagesTINF Theorie Baumgartnerapi-3708508100% (1)
- GBP-Perserkriege U. Alexander DDocument4 pagesGBP-Perserkriege U. Alexander Dapi-3708508No ratings yet
- Projektwoche-Dokumentaion V0Document31 pagesProjektwoche-Dokumentaion V0api-3708508No ratings yet
- GPB MaturathemenDocument1 pageGPB Maturathemenapi-3708508No ratings yet
- RisikomanagementDocument8 pagesRisikomanagementapi-3708508No ratings yet
- Controller SchaltungsbeschreibungDocument8 pagesController Schaltungsbeschreibungapi-3708508No ratings yet
- Fourier QuantisierungsfehlerDocument2 pagesFourier Quantisierungsfehlerapi-3708508No ratings yet
- EDT FormelzettelDocument2 pagesEDT Formelzettelapi-3708508No ratings yet
- Geschichte Mitschrift (20.03Document26 pagesGeschichte Mitschrift (20.03api-3708508No ratings yet
- EDT Schwerpunktfach ThemenDocument1 pageEDT Schwerpunktfach Themenapi-3708508No ratings yet
- 10a Chemie 27.06.2020Document99 pages10a Chemie 27.06.2020profi maserNo ratings yet
- Datenstrukturen Und Algorithmen Sommersemester 2022Document2 pagesDatenstrukturen Und Algorithmen Sommersemester 2022aNo ratings yet
- Werkstatthandbuch-2011 DeutzDocument552 pagesWerkstatthandbuch-2011 Deutzfreetoair73% (11)
- E01 Cp343-EthernetDocument36 pagesE01 Cp343-EthernetJamel CharefNo ratings yet
- BA KR 5 Arc deDocument125 pagesBA KR 5 Arc deelmacuarro5No ratings yet