You might also like
- Ninja's Guide To OnenoteDocument13 pagesNinja's Guide To Onenotesunil100% (1)
- Tutorial Sim MechanicsDocument840 pagesTutorial Sim MechanicsHernan Gonzalez100% (4)
- Popular Mechanics 2010-06Document171 pagesPopular Mechanics 2010-06BookshebooksNo ratings yet
- Shop SupervisionDocument38 pagesShop SupervisionSakura Yuno Gozai80% (5)
- Development of Two-Input Adaptive Noise Canceller For Wideband and Narrowband Noise SignalsDocument11 pagesDevelopment of Two-Input Adaptive Noise Canceller For Wideband and Narrowband Noise Signalshimayath0606No ratings yet
- Digital Signal Processing for Audio Applications: Volume 1 - FormulaeFrom EverandDigital Signal Processing for Audio Applications: Volume 1 - FormulaeNo ratings yet
- Understanding Power Dynamics and Developing Political ExpertiseDocument29 pagesUnderstanding Power Dynamics and Developing Political Expertisealessiacon100% (1)
- Subject and Content NotesDocument52 pagesSubject and Content NotesJoe Carl CastilloNo ratings yet
- Active Noise Reduction in Ventilation DuctsDocument9 pagesActive Noise Reduction in Ventilation DuctsRobson Queiroz DamascenoNo ratings yet
- 2017 A New FXLMS Algorithm With Offline and Online Secondary-Path Modeling Scheme For Active Noise Control of Power TransformersDocument11 pages2017 A New FXLMS Algorithm With Offline and Online Secondary-Path Modeling Scheme For Active Noise Control of Power TransformersYen Ou-YangNo ratings yet
- Adaptive Blind Noise Suppression in Some Speech Processing ApplicationsDocument5 pagesAdaptive Blind Noise Suppression in Some Speech Processing ApplicationsSai Swetha GNo ratings yet
- Adaptive Blind Noise Suppression for Speech Processing ApplicationsDocument2 pagesAdaptive Blind Noise Suppression for Speech Processing ApplicationsErKhanTabrezNo ratings yet
- All Adaptive Filter AlgorithmsDocument9 pagesAll Adaptive Filter AlgorithmsAkilesh MDNo ratings yet
- Noise Cancellation Using Adaptive FilteringDocument6 pagesNoise Cancellation Using Adaptive FilteringHafizNo ratings yet
- SynopsisDocument11 pagesSynopsisGuru D Rising SunNo ratings yet
- Surround Noise Cancellation and Speech Enhancement Using Sub Band Filtering and Spectral SubtractionDocument8 pagesSurround Noise Cancellation and Speech Enhancement Using Sub Band Filtering and Spectral Subtractionhammadriaz1No ratings yet
- 0010 Praes AECDocument5 pages0010 Praes AECPradeep Poduval K PNo ratings yet
- A Noise Reduction Method Based On LMS Adaptive Filter of Audio SignalsDocument8 pagesA Noise Reduction Method Based On LMS Adaptive Filter of Audio SignalsRkeA RkeRNo ratings yet
- MIMO Beamforming System For Speech Enhancement in RealisticDocument10 pagesMIMO Beamforming System For Speech Enhancement in RealisticNavneetUpadhyayNo ratings yet
- A D W T: Udio Enoising Using Avelet RansformDocument7 pagesA D W T: Udio Enoising Using Avelet RansformAkhilaNo ratings yet
- BhgyuiDocument5 pagesBhgyuiRup JoshiNo ratings yet
- A Variable Tap-Length Feedback Minimum Mean M-Estimate Adaptive Sub-Band Filtering Algorithm For Improved ANCDocument5 pagesA Variable Tap-Length Feedback Minimum Mean M-Estimate Adaptive Sub-Band Filtering Algorithm For Improved ANCAmbika Prasad ChandaNo ratings yet
- 39 48Document10 pages39 48Sasan Ahdi RezaeiehNo ratings yet
- Marz Koll 2002 Speech-PauseDocument10 pagesMarz Koll 2002 Speech-PausenidhalNo ratings yet
- Design and Implementation of Adaptive Filtering Algorithm For Noise Cancellation of Speech Signal On Fpga For Hearing AidDocument27 pagesDesign and Implementation of Adaptive Filtering Algorithm For Noise Cancellation of Speech Signal On Fpga For Hearing AidVaisakh SugathanNo ratings yet
- Active Noise ControlDocument32 pagesActive Noise ControlHuynh Cong HaoNo ratings yet
- Anti AliasDocument17 pagesAnti Aliasdds70No ratings yet
- Version 2 - Development of An ANC Model and Analysing The Performance of Adaptive Filtering AlgorithmsDocument7 pagesVersion 2 - Development of An ANC Model and Analysing The Performance of Adaptive Filtering Algorithmstayyabkhan00No ratings yet
- Evaluation of Adaptive Noise Cancellatio 07edd937 - 2Document6 pagesEvaluation of Adaptive Noise Cancellatio 07edd937 - 2HanNo ratings yet
- Libshitz, S. P., Vanderkooy, J. - Pulse Code Modulation An OverviewDocument16 pagesLibshitz, S. P., Vanderkooy, J. - Pulse Code Modulation An OverviewMartinAggroweNo ratings yet
- A Self-Steering Digital Microphone Array: At&T NJ, UsaDocument4 pagesA Self-Steering Digital Microphone Array: At&T NJ, UsaMayssa RjaibiaNo ratings yet
- Two-Sensor Adaptive Noise CancellationDocument5 pagesTwo-Sensor Adaptive Noise CancellationilgisizalakasizNo ratings yet
- Anti Ali ADocument17 pagesAnti Ali Asaske969No ratings yet
- Wavelet Speech Denoising: Yann Cii Kiat Yeo2Document4 pagesWavelet Speech Denoising: Yann Cii Kiat Yeo2raghu4u007No ratings yet
- High Performance AXI4 To AHB Bridge (Using A Local Interface)Document5 pagesHigh Performance AXI4 To AHB Bridge (Using A Local Interface)Editor IJRITCCNo ratings yet
- Eigen BeamformingDocument1 pageEigen BeamformingKeith DelgadoNo ratings yet
- A Low Frequency Noise Cancellation Vlsi Circuit Design Using Lms Adaptive Filter For In-Ear Headphones.Document7 pagesA Low Frequency Noise Cancellation Vlsi Circuit Design Using Lms Adaptive Filter For In-Ear Headphones.ijire publicationNo ratings yet
- Adaptive Filtering Techniques for Speech Enhancement Using Noise SuppressionDocument18 pagesAdaptive Filtering Techniques for Speech Enhancement Using Noise SuppressionsudarshanNo ratings yet
- Active Noise Control: A Tutorial Review: Sen M. Kuo Dennis R. MorganDocument31 pagesActive Noise Control: A Tutorial Review: Sen M. Kuo Dennis R. MorganRishavNo ratings yet
- Different Techniques For The Enhancement of The Intelligibility of A Speech SignalDocument8 pagesDifferent Techniques For The Enhancement of The Intelligibility of A Speech SignalIJERDNo ratings yet
- Reconfigurable Filter Design For Multiband Noise CancellationDocument4 pagesReconfigurable Filter Design For Multiband Noise CancellationRimsha MaryamNo ratings yet
- Implementation of Adaptive Filtering Algorithm For Speech Signal On FPGADocument5 pagesImplementation of Adaptive Filtering Algorithm For Speech Signal On FPGAQuân Trần MạnhNo ratings yet
- New Delayless Subband ANC Filtering AlgorithmDocument12 pagesNew Delayless Subband ANC Filtering AlgorithmPrasanna KumarNo ratings yet
- Efficient Active Noise Cancellation for (1)Document5 pagesEfficient Active Noise Cancellation for (1)Subham BeheraNo ratings yet
- Adaptive Noise Cancellation Using Multirate Techniques: Prasheel V. Suryawanshi, Kaliprasad Mahapatro, Vardhman J. ShethDocument7 pagesAdaptive Noise Cancellation Using Multirate Techniques: Prasheel V. Suryawanshi, Kaliprasad Mahapatro, Vardhman J. ShethIJERDNo ratings yet
- Application of Microphone Array For Speech Coding in Noisy EnvironmentDocument5 pagesApplication of Microphone Array For Speech Coding in Noisy Environmentscribd1235207No ratings yet
- ACTIVE NOISE CONTROL USING PAIR OF SPEAKERSDocument6 pagesACTIVE NOISE CONTROL USING PAIR OF SPEAKERSvikas chawlaNo ratings yet
- International Journal of Engineering Research and Development (IJERD)Document8 pagesInternational Journal of Engineering Research and Development (IJERD)IJERDNo ratings yet
- Echo Cancellation Algorithms Using Adaptive Filters: A Comparative StudyDocument8 pagesEcho Cancellation Algorithms Using Adaptive Filters: A Comparative StudyidescitationNo ratings yet
- Farrukh Adsp Research PaperDocument4 pagesFarrukh Adsp Research PaperFarrukh TanveerNo ratings yet
- New Insights Into The Noise Reduction Wiener FilterDocument17 pagesNew Insights Into The Noise Reduction Wiener FilterBhuvan BlueNo ratings yet
- Adaptive Digital FiltersDocument10 pagesAdaptive Digital Filtersfantastic05No ratings yet
- Icassp 02Document4 pagesIcassp 02Venugopal SanthanamNo ratings yet
- T/ Iitsch,: Christina Breining, Dreiseitd, Etkrhard Xansler, Scheder, SCMDQ Andjan HenningDocument28 pagesT/ Iitsch,: Christina Breining, Dreiseitd, Etkrhard Xansler, Scheder, SCMDQ Andjan HenningDiwakar PandeyNo ratings yet
- Audio Noise Reduction From Audio Signals and Speech Signals: Nishan Singh, Dr. Vijay LaxmiDocument5 pagesAudio Noise Reduction From Audio Signals and Speech Signals: Nishan Singh, Dr. Vijay LaxmiReshma JocyNo ratings yet
- A Novel Technique For Advanced Ultrasonic Testing of Concrete by Using Signal Conditioning Methods and A Scanning Laser VibrometerDocument5 pagesA Novel Technique For Advanced Ultrasonic Testing of Concrete by Using Signal Conditioning Methods and A Scanning Laser VibrometersrgokuNo ratings yet
- A Noise Suppression System For The AMR Speech Codec: 2.1 Analysis and SynthesisDocument4 pagesA Noise Suppression System For The AMR Speech Codec: 2.1 Analysis and SynthesisMamun AlNo ratings yet
- Variable StageCascadedAdaptiveDocument35 pagesVariable StageCascadedAdaptiveAkilesh MDNo ratings yet
- Anti-Aliasing Filter - Wikipedia, The Free EncyclopediaDocument3 pagesAnti-Aliasing Filter - Wikipedia, The Free EncyclopediaJaydeep ParmarNo ratings yet
- 8 Vol 77 No 1Document9 pages8 Vol 77 No 1prajwalgundmiNo ratings yet
- Transfer-Function Measurement With Sweeps PDFDocument52 pagesTransfer-Function Measurement With Sweeps PDFHector Herrera ChavezNo ratings yet
- Boll79 SuppressionAcousticNoiseSpectralSubtraction PDFDocument8 pagesBoll79 SuppressionAcousticNoiseSpectralSubtraction PDFNguyễn Trí PhướcNo ratings yet
- (RFD0009) Improving The Vector Network Analyzer S Dynamic RangeDocument4 pages(RFD0009) Improving The Vector Network Analyzer S Dynamic Rangesaleemnasir2k7154No ratings yet
- Seismic Processing - Noise Attenuation Techniques PDFDocument3 pagesSeismic Processing - Noise Attenuation Techniques PDFDavid Karel AlfonsNo ratings yet
- 2014june Pgs Bekara SwellnoiseDocument5 pages2014june Pgs Bekara SwellnoisesswidodoNo ratings yet
- Design Techniques For Low Noise Cmos Operational AmplifiersDocument4 pagesDesign Techniques For Low Noise Cmos Operational AmplifiersChandra Praveen MahalingamNo ratings yet
- 3Document22 pages3api-26172869No ratings yet
- MCPTDocument17 pagesMCPTapi-26172869100% (2)
- Seminar Report Stealth in Fighter AircraftsDocument30 pagesSeminar Report Stealth in Fighter Aircraftsapi-26172869100% (1)
- Seminar Report Electromagnetic BombDocument26 pagesSeminar Report Electromagnetic Bombapi-26172869100% (1)
- Information Security Using SteganographyDocument10 pagesInformation Security Using Steganographyapi-26172869No ratings yet
- VotingDocument16 pagesVotingapi-261728690% (1)
- WCWWDocument17 pagesWCWWapi-26172869No ratings yet
- NnsDocument23 pagesNnsapi-26172869No ratings yet
- Fast Convergence Algorithms For Active Noise Control in VehiclesDocument15 pagesFast Convergence Algorithms For Active Noise Control in Vehiclesapi-26172869No ratings yet
- IP&CTDocument15 pagesIP&CTapi-26172869No ratings yet
- FLDUDocument10 pagesFLDUapi-26172869100% (1)
- D2DFDocument10 pagesD2DFapi-26172869No ratings yet
- Industrial Applications Using Neural NetworksDocument11 pagesIndustrial Applications Using Neural Networksapi-26172869No ratings yet
- 93#fuzzy Based Washing Machine Sona College of Technology SDocument13 pages93#fuzzy Based Washing Machine Sona College of Technology SSijo KochummanNo ratings yet
- AiscDocument13 pagesAiscapi-26172869No ratings yet
- MISTFDocument10 pagesMISTFapi-26172869No ratings yet
- Real-Time Image Processing Applied To Traffic - Queue Detection AlgorithmDocument12 pagesReal-Time Image Processing Applied To Traffic - Queue Detection Algorithmapi-26172869No ratings yet
- 80#nanotechnology Government College of Engineering TirunelvDocument15 pages80#nanotechnology Government College of Engineering Tirunelvapi-26172869No ratings yet
- MIMO Wireless Channels: Capacity and Performance PredictionDocument14 pagesMIMO Wireless Channels: Capacity and Performance Predictionapi-26172869No ratings yet
- TsaDocument11 pagesTsaapi-26172869No ratings yet
- NDocument17 pagesNapi-26172869No ratings yet
- Bluetooth Based Smart Sensor NetworksDocument10 pagesBluetooth Based Smart Sensor NetworksSaugat PradhanNo ratings yet
- GSM Security and EncryptionDocument17 pagesGSM Security and Encryptionapi-26172869No ratings yet
- SVTDocument14 pagesSVTapi-26172869No ratings yet
- AEAIDocument13 pagesAEAIapi-26172869No ratings yet
- Wisenet: (Wireless Sensor Network)Document13 pagesWisenet: (Wireless Sensor Network)api-26172869100% (1)
- Optical Networking and Dense Wavelength Division Multiplexing (DWDM)Document12 pagesOptical Networking and Dense Wavelength Division Multiplexing (DWDM)api-26172869No ratings yet
- UtcDocument11 pagesUtcapi-26172869No ratings yet
- EtrDocument12 pagesEtrapi-26172869No ratings yet
- Usage Instructions - Hengro PoolProtect 1 - 5Document3 pagesUsage Instructions - Hengro PoolProtect 1 - 5Brian VisserNo ratings yet
- Manager - PPIC Role DescriptionDocument2 pagesManager - PPIC Role DescriptionAmit TamhankarNo ratings yet
- SO CF, Internal Fault Map Class 1A SO CF, Internal Fault Map Class 2A SO CF, External Condition Map Class 1BDocument15 pagesSO CF, Internal Fault Map Class 1A SO CF, Internal Fault Map Class 2A SO CF, External Condition Map Class 1BATMMOBILISNo ratings yet
- Ethanol: Safety Data SheetDocument19 pagesEthanol: Safety Data SheetNitika SinhaNo ratings yet
- Chemistry 101 - The Complete Notes - Joliet Junior College (PDFDrive)Document226 pagesChemistry 101 - The Complete Notes - Joliet Junior College (PDFDrive)Kabwela MwapeNo ratings yet
- Critical Thinking Essay-Animal Testing: Rough DraftDocument10 pagesCritical Thinking Essay-Animal Testing: Rough Draftjeremygcap2017No ratings yet
- COP Oil: For Epiroc Components We Combine Technology and Environmental SustainabilityDocument4 pagesCOP Oil: For Epiroc Components We Combine Technology and Environmental SustainabilityDavid CarrilloNo ratings yet
- Empowerment Technology - Week 2Document3 pagesEmpowerment Technology - Week 2yahgieNo ratings yet
- Studying Supply and Demand of Software Maintenance and Evolution ServicesDocument6 pagesStudying Supply and Demand of Software Maintenance and Evolution ServicesJorge Arturo Moreno VeasNo ratings yet
- Exhaust Brake PDFDocument2 pagesExhaust Brake PDFFeliciaNo ratings yet
- Chemical Engineering Assignment SubmissionDocument10 pagesChemical Engineering Assignment SubmissionFahad KamranNo ratings yet
- 21st Century Literature Exam SpecsDocument2 pages21st Century Literature Exam SpecsRachel Anne Valois LptNo ratings yet
- Develop Network Monitoring System IP Subnet CalculatorDocument23 pagesDevelop Network Monitoring System IP Subnet CalculatorabiramanNo ratings yet
- HWXX 6516DS1 VTM PDFDocument1 pageHWXX 6516DS1 VTM PDFDmitriiSpiridonovNo ratings yet
- Information HandoutsDocument6 pagesInformation HandoutsPooja Marwadkar TupcheNo ratings yet
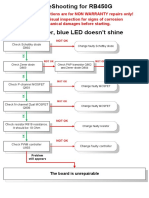
- RB450G Trouble ShootingDocument9 pagesRB450G Trouble Shootingjocimar1000No ratings yet
- Water Sampling and Borehole Inspection FormsDocument2 pagesWater Sampling and Borehole Inspection FormsSibanda MqondisiNo ratings yet
- 6 Main Rotor Config DesignDocument44 pages6 Main Rotor Config DesignDeepak Paul TirkeyNo ratings yet
- Timothy Prehn CV 021209Document4 pagesTimothy Prehn CV 021209Jason GomezNo ratings yet
- Packing, Transportation and Marketing of Ornamental FishesDocument16 pagesPacking, Transportation and Marketing of Ornamental Fishesraj kiranNo ratings yet
- Manufacturing Processes (ME361) Lecture 13: Instructor: Shantanu BhattacharyaDocument28 pagesManufacturing Processes (ME361) Lecture 13: Instructor: Shantanu BhattacharyaSahil SundaNo ratings yet
- Radiograph Evaluation ChecklistDocument2 pagesRadiograph Evaluation ChecklistZulfadli Haron100% (1)
- AR Adjustments: Details, Setup, Flow, Accounting and API: September 5th, 2008Document5 pagesAR Adjustments: Details, Setup, Flow, Accounting and API: September 5th, 2008John SmithNo ratings yet
- Transportation Geotechnics: Tirupan Mandal, James M. Tinjum, Tuncer B. EdilDocument11 pagesTransportation Geotechnics: Tirupan Mandal, James M. Tinjum, Tuncer B. EdilDaniel Juan De Dios OchoaNo ratings yet