You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Wired-Or INT LinesDocument1 pageWired-Or INT Linesapi-3838221No ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- B.E Computer Science and EngineeringDocument70 pagesB.E Computer Science and Engineeringapi-3838221No ratings yet
- 08 CompOrgDocument35 pages08 CompOrgIke Mag-away GaamilNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Timers LectureDocument11 pagesTimers Lectureapi-3838221No ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Software Fundamentals II LectureDocument20 pagesSoftware Fundamentals II Lectureapi-3838221No ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Special Topics Embedded Systems LectureDocument7 pagesSpecial Topics Embedded Systems Lectureapi-3838221No ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
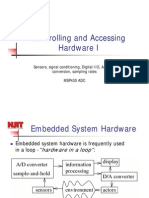
- Controlling and Accessing Hardware I LectureDocument21 pagesControlling and Accessing Hardware I Lectureapi-3838221No ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Msp430f2013 AnnotatedDocument86 pagesMsp430f2013 Annotatedapi-3838221No ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Software Fundamentals I LectureDocument16 pagesSoftware Fundamentals I Lectureapi-3838221No ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Controlling Interrupt Frequencies - LectureDocument16 pagesControlling Interrupt Frequencies - Lectureapi-3838221No ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- LCD Display Drivers LectureDocument16 pagesLCD Display Drivers Lectureapi-3838221No ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Virtual ClassroomDocument24 pagesVirtual Classroomapi-3838221100% (1)
- Ch5 Architecture LectureDocument15 pagesCh5 Architecture Lectureapi-3838221No ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Ch9 Embedded Software Development ToolsDocument15 pagesCh9 Embedded Software Development Toolsapi-3838221100% (1)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Ch10 Debugging Techniques LecturesDocument13 pagesCh10 Debugging Techniques Lecturesमेनसन लाखेमरूNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Ch3 Advanced Hardware Fundamentals LectureDocument24 pagesCh3 Advanced Hardware Fundamentals Lectureapi-3838221100% (1)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Ch2 Hardware Fundamentals LectureDocument13 pagesCh2 Hardware Fundamentals Lectureapi-3838221No ratings yet
- Introduction To IT and Com SystemsDocument122 pagesIntroduction To IT and Com SystemsAbdullah HolifNo ratings yet
- Syllabus PG DIOTDocument7 pagesSyllabus PG DIOTndpraju123100% (1)
- DX200 MaintainenceDocument1,166 pagesDX200 Maintainenceankur guliaNo ratings yet
- Javascript Referance - Jan ZumwaltDocument36 pagesJavascript Referance - Jan ZumwaltjwzumwaltNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- PrintDocument30 pagesPrintchris mabantaNo ratings yet
- PLSQL TocDocument12 pagesPLSQL Tocram5584No ratings yet
- ECblue Modbus DescriptionDocument27 pagesECblue Modbus DescriptionBartosz MarciniakNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- CmakeDocument224 pagesCmakeshatteratorNo ratings yet
- 1981 ALGORITHM 575 - Permutations For A Zero-Free Diagonal (F1)Document4 pages1981 ALGORITHM 575 - Permutations For A Zero-Free Diagonal (F1)DimitrisSotiropoulosNo ratings yet
- Simulation-Experiments - Doc 2015Document7 pagesSimulation-Experiments - Doc 2015JohnNo ratings yet
- Recursion 2.0Document38 pagesRecursion 2.0Rati ShankarNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Structure ChartDocument16 pagesStructure Chartanuragmsrcasc100% (1)
- Extend OptimxDocument13 pagesExtend OptimxGiorgio OttolinaNo ratings yet
- Adobe ColdFusion 9 - Binding Data To Form FieldsDocument6 pagesAdobe ColdFusion 9 - Binding Data To Form FieldsmvergelNo ratings yet
- PLSQL Section 1-10Document14 pagesPLSQL Section 1-10Abdalah HusaeniNo ratings yet
- CISC Vs RISC and I286, I386, I486Document12 pagesCISC Vs RISC and I286, I386, I486Manash MandalNo ratings yet
- Easy Way To Learn C ProgrammingDocument286 pagesEasy Way To Learn C ProgrammingAaron Abinson100% (2)
- Unit 1 & 2Document79 pagesUnit 1 & 2Malav PatelNo ratings yet
- PL SQL InterviewDocument8 pagesPL SQL InterviewVipin SinghNo ratings yet
- KGS Activator For SAP R/3: Reference GuideDocument432 pagesKGS Activator For SAP R/3: Reference GuideKentsao KenNo ratings yet
- QB64 v0.954 ReadmeDocument13 pagesQB64 v0.954 Readmeyogo3912No ratings yet
- Advanced Oracle PLSQL Programming: Advantech 1 KrishnamurthyDocument0 pagesAdvanced Oracle PLSQL Programming: Advantech 1 KrishnamurthyranusofiNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Chapter (6) PDFDocument26 pagesChapter (6) PDFAbdelrahman SamirNo ratings yet
- Software Design Document: Hotel Management SystemDocument28 pagesSoftware Design Document: Hotel Management SystemRamiz Siddiqui57% (7)
- Space and Time Complexity in Chapter 1: All The Programs in This File Are Selected FromDocument19 pagesSpace and Time Complexity in Chapter 1: All The Programs in This File Are Selected Fromram546No ratings yet
- Saphelp Erp60 SP Value Added ServiceDocument43 pagesSaphelp Erp60 SP Value Added Servicegurushreya27No ratings yet
- WWW Sphinx Doc Org en Master PDFDocument480 pagesWWW Sphinx Doc Org en Master PDFpepeladazoNo ratings yet
- KCPSM6 User Guide 30sept14 PDFDocument124 pagesKCPSM6 User Guide 30sept14 PDFGustavo GranadosNo ratings yet
- STROBE DB2 Feature, Form Number STF004Document58 pagesSTROBE DB2 Feature, Form Number STF004sati1987No ratings yet