You might also like
- Manual de Ordem UnidaDocument15 pagesManual de Ordem Unidaapi-3701624100% (6)
- Honra Ao MritoDocument1 pageHonra Ao Mritoapi-3701624No ratings yet
- Como Organizar Um Clube em 6 PassosDocument16 pagesComo Organizar Um Clube em 6 Passosapi-3701624No ratings yet
- 6 Guia e Guia de ExploraoDocument2 pages6 Guia e Guia de Exploraoapi-3701624No ratings yet
- 3 Pesquisador e Pesquisador de Campos e BosquesDocument2 pages3 Pesquisador e Pesquisador de Campos e Bosquesapi-3701624No ratings yet
- Clube de Ouro 2009Document6 pagesClube de Ouro 2009api-3701624No ratings yet
- As FogueirasDocument4 pagesAs Fogueirasapi-3701624No ratings yet
- AbrigosDocument7 pagesAbrigosapi-3701624100% (1)
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Antes Dos Cart Es Telef NicosDocument3 pagesAntes Dos Cart Es Telef Nicosapi-3701624No ratings yet
- 4 Pioneiro e Pioneiro de Novas FronteirasDocument2 pages4 Pioneiro e Pioneiro de Novas Fronteirasapi-3701624No ratings yet
- 5 Excursionista e Excursionista Na MataDocument2 pages5 Excursionista e Excursionista Na Mataapi-3701624No ratings yet
- Ed 1 2007 BB 2007 3 Abt Final FormatadoDocument30 pagesEd 1 2007 BB 2007 3 Abt Final Formatadoapi-3701624No ratings yet
- Planilha de NotasDocument1 pagePlanilha de Notasapi-3701624No ratings yet
- 2 Companheiro e Companheiro de ExcursoDocument2 pages2 Companheiro e Companheiro de Excursoapi-3701624No ratings yet
- Apostila de Oracle (Clube Delphi)Document50 pagesApostila de Oracle (Clube Delphi)api-3701624100% (4)
- 1 Amigo e Amigo Da NaturezaDocument2 pages1 Amigo e Amigo Da Naturezaapi-3701624No ratings yet
- Planilha de NotasDocument2 pagesPlanilha de Notasapi-3701624No ratings yet
- Pesquisa EtnográficaDocument1 pagePesquisa Etnográficaapi-3701624100% (1)
- (25!04!07) BB - Luiz Henrique - Apostila de AtualidadesDocument32 pages(25!04!07) BB - Luiz Henrique - Apostila de Atualidadesapi-3701624No ratings yet
- Ed 1 2007 Tcu Ace Tce Abt FinalDocument27 pagesEd 1 2007 Tcu Ace Tce Abt FinalRodrigo ViannaNo ratings yet
- Atividade Supervision Ada Jairo MolinaDocument4 pagesAtividade Supervision Ada Jairo Molinaapi-3701624No ratings yet
- Ed 2 2007 Tcu Ace Tce Ret FormDocument2 pagesEd 2 2007 Tcu Ace Tce Ret Formapi-3701624No ratings yet
- ReferÊnciasDocument11 pagesReferÊnciasapi-3701624No ratings yet
- Edital07 2007-InscricaoDocument19 pagesEdital07 2007-Inscricaoapi-3701624No ratings yet
- Modelo ArtigoDocument6 pagesModelo Artigoapi-3701624100% (1)
- FichaDocument1 pageFichaapi-3701624No ratings yet
- Edital EntecDocument7 pagesEdital Entecapi-3701624No ratings yet
- Revista AmbienteDocument3 pagesRevista Ambienteapi-3701624No ratings yet
- Computadores pedagógicos escolasDocument4 pagesComputadores pedagógicos escolasluizg791No ratings yet
- Apostila AutoCAD 2008Document99 pagesApostila AutoCAD 2008Augusto Carlos CostaNo ratings yet
- MKT Digital e relações de consumoDocument3 pagesMKT Digital e relações de consumoBruna Alves Machado0% (1)
- Assinado de forma digital lei institui política de dados abertos em AlagoasDocument100 pagesAssinado de forma digital lei institui política de dados abertos em AlagoasmundobrNo ratings yet
- 2015 04 Links Da Deep Web AbrilDocument24 pages2015 04 Links Da Deep Web AbrilOsairManassan100% (1)
- Programação em TI Voyage 200 Aplicado À EngenhariaDocument88 pagesProgramação em TI Voyage 200 Aplicado À EngenhariaTiago LopesNo ratings yet
- Análise de inclinação, linha de partição e escala em peças moldadasDocument522 pagesAnálise de inclinação, linha de partição e escala em peças moldadasPlinio Sergio Rodrigues100% (1)
- Scrum - A Metodologia Ágil Explicada de Forma DefinitivaDocument10 pagesScrum - A Metodologia Ágil Explicada de Forma DefinitivabetobitkingNo ratings yet
- Probabilidade de anagramas, sorteios e relatóriosDocument4 pagesProbabilidade de anagramas, sorteios e relatóriosAlessandra DoriniNo ratings yet
- SIPEX - Manual do Sistema de Controle de Protocolo e ExpedienteDocument22 pagesSIPEX - Manual do Sistema de Controle de Protocolo e ExpedientemjsouzasjcNo ratings yet
- TCC Vitor Felicio Salema PDFDocument79 pagesTCC Vitor Felicio Salema PDFVítor SalemaNo ratings yet
- Matemática A - Exponenciais e LogaritmosDocument7 pagesMatemática A - Exponenciais e LogaritmosMatemtica2015No ratings yet
- Exercicios C++Document30 pagesExercicios C++venomvNo ratings yet
- Exercicios Balanço de MassaDocument5 pagesExercicios Balanço de MassaAlvaro BenattiNo ratings yet
- POO RobocodeDocument16 pagesPOO RobocodeMatthew HolmesNo ratings yet
- A Importância Do Método CientíficoDocument4 pagesA Importância Do Método CientíficoAna88% (16)
- CursosGratuitosTECNOLOGIADA INFORMACAOSemestre2012Document2 pagesCursosGratuitosTECNOLOGIADA INFORMACAOSemestre2012Dierla Pires CostaNo ratings yet
- Plano de Aula LOGISTICADocument2 pagesPlano de Aula LOGISTICACcasue LagutropNo ratings yet
- Metodologia 8D para resolução de problemasDocument3 pagesMetodologia 8D para resolução de problemasRodrigo Noguerol CorreaNo ratings yet
- TObjectList - Como Trabalhar Com Coleções de Objetos No DelphiDocument20 pagesTObjectList - Como Trabalhar Com Coleções de Objetos No Delphisantos8santos-2No ratings yet
- Direitos humanos e investigação particularDocument7 pagesDireitos humanos e investigação particularGesergio SantosNo ratings yet
- Exemplos de Tipos de Gráficos: Aplicação em Dados ReaisDocument16 pagesExemplos de Tipos de Gráficos: Aplicação em Dados Reaisdmd2No ratings yet
- Apresentacao2 Base de DadosDocument7 pagesApresentacao2 Base de DadosJose Kalilodoka NelitoNo ratings yet
- APOL4 Sistemas de Informao Gerencial 100Document4 pagesAPOL4 Sistemas de Informao Gerencial 100SilvanoNo ratings yet
- Manual Atlas - Ti Tatiana Marceda BachDocument25 pagesManual Atlas - Ti Tatiana Marceda Bachtatibach100% (2)
- SisDeb CNAB 240 ItauBBADocument19 pagesSisDeb CNAB 240 ItauBBAJoão RodrigoNo ratings yet
- Como Criar PDF Com Varias PaginasDocument2 pagesComo Criar PDF Com Varias PaginasVinceNo ratings yet
- Roteiro Eclipse JavaDocument3 pagesRoteiro Eclipse JavaTeresa OliveiraNo ratings yet
- Fundamentos de lógica e algoritmosDocument44 pagesFundamentos de lógica e algoritmosJomarFerreiraNo ratings yet
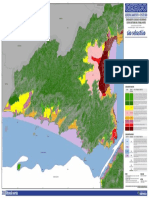
- Gerenciamento costeiro e zoneamento ecológico-econômico do litoral norte de SPDocument1 pageGerenciamento costeiro e zoneamento ecológico-econômico do litoral norte de SPGustavo Cruz100% (1)