You might also like
- Stealthy Jam Resistant AnteenaDocument2 pagesStealthy Jam Resistant AnteenaArun BoseNo ratings yet
- Silicone Elastomers: Peter JerschowDocument8 pagesSilicone Elastomers: Peter JerschowArun BoseNo ratings yet
- Memristor - The Fourth Fundamental Circuit ElementDocument19 pagesMemristor - The Fourth Fundamental Circuit ElementArun Bose100% (1)
- Embedded DramDocument23 pagesEmbedded DramAbhi MaheshwariNo ratings yet
- Micro Fluid Wireless AntennaDocument116 pagesMicro Fluid Wireless AntennaArun BoseNo ratings yet
- 4g Wireless TechnologyDocument31 pages4g Wireless Technologydivyareddy31No ratings yet
- Adfm 201002508 SM SupplDocument11 pagesAdfm 201002508 SM SupplArun BoseNo ratings yet
- Android Seminar PresentationDocument24 pagesAndroid Seminar PresentationYedu90% (20)
- 12BiCMOS TechnologyDocument17 pages12BiCMOS TechnologyAna JundullahNo ratings yet
- WSNDocument29 pagesWSNsridevishinasNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Mar ChecklistDocument18 pagesMar ChecklistMin MawNo ratings yet
- Balcom Rebecca Functional ResumeDocument2 pagesBalcom Rebecca Functional Resumeapi-360266135No ratings yet
- 50 Bed Hospital Design in 1320 sqmDocument16 pages50 Bed Hospital Design in 1320 sqmNayana Bharathi83% (6)
- Disectie AnatomieDocument908 pagesDisectie AnatomieMircea SimionNo ratings yet
- Safety of Low-Dose Oral Minoxidil for Hair Loss: A Study of 1404 PatientsDocument8 pagesSafety of Low-Dose Oral Minoxidil for Hair Loss: A Study of 1404 PatientsLuisNo ratings yet
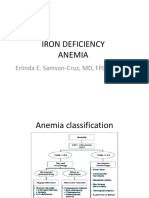
- Iron Deficiency Anemia and Megaloblastic Anemia - Samson-Cruz MDDocument47 pagesIron Deficiency Anemia and Megaloblastic Anemia - Samson-Cruz MDMiguel Cuevas DolotNo ratings yet
- Sepsis Content Concepts MapDocument2 pagesSepsis Content Concepts Mapghodghod1230% (1)
- Drug Study HydrocodoneDocument1 pageDrug Study HydrocodoneYlrenne DyNo ratings yet
- IP Sterility TestingDocument6 pagesIP Sterility TestingVarghese100% (3)
- ConclusionDocument1 pageConclusionSamNo ratings yet
- List of HospitalsDocument48 pagesList of HospitalsragpavNo ratings yet
- Local Anesthetic Systemic Toxicity AlgorithmDocument1 pageLocal Anesthetic Systemic Toxicity AlgorithmSydney JenningsNo ratings yet
- Functional Abdominal Cramping Pain Expert Practical Guidance 2022Document9 pagesFunctional Abdominal Cramping Pain Expert Practical Guidance 2022Mohamad MostafaNo ratings yet
- Nutrients: Obesity and Dyslipidemia in South AsiansDocument26 pagesNutrients: Obesity and Dyslipidemia in South AsiansFitriNo ratings yet
- End users' contact and product informationDocument3 pagesEnd users' contact and product informationمحمد ہاشمNo ratings yet
- Chest X-RayDocument125 pagesChest X-RayRusda Syawie100% (1)
- 74 Manila Pest Control Vs WCCDocument4 pages74 Manila Pest Control Vs WCCharryNo ratings yet
- CSOM of Middle Ear Part 2Document55 pagesCSOM of Middle Ear Part 2Anindya NandiNo ratings yet
- 4 Levels of Perio DZDocument2 pages4 Levels of Perio DZKIH 20162017No ratings yet
- Brochure DiseaseDocument2 pagesBrochure Diseaseapi-295870217No ratings yet
- Fundamentals of Tooth Preparation Periodontal AspectsDocument74 pagesFundamentals of Tooth Preparation Periodontal AspectsVica Vitu100% (3)
- How I Do CMR Scanning Safely: Elisabeth Burman Research Sister Royal Brompton Hospital, London UKDocument41 pagesHow I Do CMR Scanning Safely: Elisabeth Burman Research Sister Royal Brompton Hospital, London UKYuda FhunkshyangNo ratings yet
- Toxic Metabolic Encephalopathy John W. Melton, M.DDocument17 pagesToxic Metabolic Encephalopathy John W. Melton, M.DabdalkhalidNo ratings yet
- Life 2E Pre-Intermediate Unit 1 WB PDFDocument8 pagesLife 2E Pre-Intermediate Unit 1 WB PDFTrần Quý Dương100% (2)
- Mandibular Molar Protraction With Temporary Anchorage DevicesDocument5 pagesMandibular Molar Protraction With Temporary Anchorage Devicescarlosasd15No ratings yet
- Arichuvadi Maruthuva Malar 2nd IssueDocument52 pagesArichuvadi Maruthuva Malar 2nd IssueVetrivel.K.BNo ratings yet
- Accomplishment ReportDocument16 pagesAccomplishment ReportIsaias BigolNo ratings yet
- BurosumabDocument8 pagesBurosumabutamiprakosoNo ratings yet
- HEX Character Generation Cheat Sheet Version 3Document20 pagesHEX Character Generation Cheat Sheet Version 3NestorDRod100% (1)
- Stress Dose SteroidsDocument4 pagesStress Dose SteroidsTitien fitria sholihati100% (1)