You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- COUNTERDocument3 pagesCOUNTERkaran007_mNo ratings yet
- Experiment 3 - RL and RC CircuitDocument10 pagesExperiment 3 - RL and RC Circuitnick amir100% (1)
- Lab 1 Digital System PDFDocument9 pagesLab 1 Digital System PDFJimmy TanNo ratings yet
- Demulti Plexer and MultiolexerDocument7 pagesDemulti Plexer and Multiolexerkaran007_mNo ratings yet
- Lecture Notes For Digital ElectronicsDocument43 pagesLecture Notes For Digital ElectronicsShruti GuptaNo ratings yet
- Demulti Plexer and MultiolexerDocument7 pagesDemulti Plexer and Multiolexerkaran007_m100% (1)
- Code and PerityDocument1 pageCode and Peritykaran007_mNo ratings yet
- Code and PerityDocument20 pagesCode and Peritykaran007_mNo ratings yet
- Binary and Hexadecimal Number SystemDocument4 pagesBinary and Hexadecimal Number Systemkaran007_m100% (3)
- A/d and D/a Convertor Digital TechnicsDocument106 pagesA/d and D/a Convertor Digital Technicskaran007_m100% (2)
- Anthor Pathic CircuitDocument28 pagesAnthor Pathic Circuitkaran007_mNo ratings yet
- Binary and Hexadecimal Number SystemDocument19 pagesBinary and Hexadecimal Number Systemkaran007_m50% (2)
- Wave Shaping and Swiching CircuitsDocument4 pagesWave Shaping and Swiching Circuitskaran007_mNo ratings yet
- A/d and D/a Convertor Digital TechnicsDocument6 pagesA/d and D/a Convertor Digital Technicskaran007_m100% (1)
- B.SC ElectronicsDocument4 pagesB.SC Electronicsatif097No ratings yet
- Fundamental Semiconductor PhysicsDocument48 pagesFundamental Semiconductor PhysicsClive RogersNo ratings yet
- Movation CircuitDocument28 pagesMovation Circuitkaran007_mNo ratings yet
- DC Transient Analysis Using SimulationDocument6 pagesDC Transient Analysis Using SimulationJanani RangarajanNo ratings yet
- Voltage Multiplier CircuitDocument4 pagesVoltage Multiplier CircuitDanny DavisNo ratings yet
- Aec Unit 4 MCQDocument3 pagesAec Unit 4 MCQThil PaNo ratings yet
- Assignment 7 Solution 3rd EditionDocument5 pagesAssignment 7 Solution 3rd EditionAvi SinghNo ratings yet
- Sinusoidal OscillatorDocument22 pagesSinusoidal OscillatorChandrika Reddy100% (1)
- M&I UNIT III Notes - Downloaded From EEEexclusive - BlogspotDocument8 pagesM&I UNIT III Notes - Downloaded From EEEexclusive - BlogspotJi La BaNo ratings yet
- 5.interconversion of Universal Gates and de Morgans TheoremDocument6 pages5.interconversion of Universal Gates and de Morgans TheoremKARTHIK MNo ratings yet
- Adc PDFDocument18 pagesAdc PDFAshfaaq OchatoyaNo ratings yet
- A Fully Integrated Radio-Fiber InterfaceDocument3 pagesA Fully Integrated Radio-Fiber InterfaceSana FatimaNo ratings yet
- Ventics - Logics Exp3Document19 pagesVentics - Logics Exp3Junjun VenticNo ratings yet
- List of 7400 Series Integrated Circuits - Wikipedia, The Free EncyclopediaDocument11 pagesList of 7400 Series Integrated Circuits - Wikipedia, The Free EncyclopediaHermes Heli Retiz AlvarezNo ratings yet
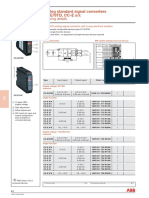
- ABB - Ma and V Signal Converter and IsolatorDocument2 pagesABB - Ma and V Signal Converter and IsolatorKmj KmjNo ratings yet
- Methods of AnalysisDocument37 pagesMethods of AnalysisMaumita AdhikaryNo ratings yet
- Data Sheet: 74HC/HCT32Document6 pagesData Sheet: 74HC/HCT32malirezazadeh5549No ratings yet
- Thuy Tran TN Ic Cmos Rfams Layout M - Designer, SRDocument3 pagesThuy Tran TN Ic Cmos Rfams Layout M - Designer, SRDesineeNo ratings yet
- DTE Imp QuestionsDocument2 pagesDTE Imp QuestionsPushkar rane 1oth,B,ROLL NO.47No ratings yet
- PDFDocument4 pagesPDFArpit PatelNo ratings yet
- Synchronous Counters: Why Synchronous Rather Than Asynchronous?Document19 pagesSynchronous Counters: Why Synchronous Rather Than Asynchronous?shanthi_logasivaNo ratings yet
- Lecture - Nichols - Chart PDFDocument13 pagesLecture - Nichols - Chart PDFJazzy BieberNo ratings yet
- P - Chapter 9Document12 pagesP - Chapter 9usa2017lapNo ratings yet
- Digital Lab ManualDocument87 pagesDigital Lab ManualKALAIMATHINo ratings yet
- Exp3 Universal Gates 1Document23 pagesExp3 Universal Gates 1Joie Marie Yadao BulawanNo ratings yet
- 939 RIFE Machine CircuitDocument5 pages939 RIFE Machine CircuitleontindemeterNo ratings yet
- Schmitt TriggerDocument3 pagesSchmitt TriggerHaja FarookNo ratings yet
- ECE65 - W12 BJT Prob PDFDocument9 pagesECE65 - W12 BJT Prob PDFAccio MoraNo ratings yet
- Fundamentals of FlipflopsDocument52 pagesFundamentals of FlipflopskanchiNo ratings yet
- The Criterea For Margin Noise EstimatesDocument5 pagesThe Criterea For Margin Noise EstimatesEumesmoestouNo ratings yet
- Uc 3843 Data SheetDocument56 pagesUc 3843 Data Sheetmeepow100% (1)