You might also like
- Electronic Engineering: S. No. Subject Book Name AuthorDocument3 pagesElectronic Engineering: S. No. Subject Book Name AuthorAshok ChakravarthyNo ratings yet
- Ese 2017 Prelims Ece Paper SolutionDocument52 pagesEse 2017 Prelims Ece Paper Solutionsanthosh EslateNo ratings yet
- GATE 2018 Information Brochure - v1Document39 pagesGATE 2018 Information Brochure - v1Charan ReddyNo ratings yet
- Syllabus GATE 2016Document14 pagesSyllabus GATE 2016bestmadeeasyNo ratings yet
- Ese 2017 Prelims Paper 1 PDFDocument13 pagesEse 2017 Prelims Paper 1 PDFKishore ChandNo ratings yet
- Syllabus GATE 2016Document14 pagesSyllabus GATE 2016bestmadeeasyNo ratings yet
- Q.No. Type Section Key/Range MarksDocument3 pagesQ.No. Type Section Key/Range MarksAshok ChakravarthyNo ratings yet
- Ese 2017 Prelims Ece Paper SolutionDocument52 pagesEse 2017 Prelims Ece Paper Solutionsanthosh EslateNo ratings yet
- Q.No. Type Section Key/Range MarksDocument3 pagesQ.No. Type Section Key/Range MarksAshok ChakravarthyNo ratings yet
- Cadence DSV Sim Amb Amba4streamDocument2 pagesCadence DSV Sim Amb Amba4streamAshok ChakravarthyNo ratings yet
- I2C Protocol Overview and EZI2C ImplementationDocument5 pagesI2C Protocol Overview and EZI2C ImplementationAshok ChakravarthyNo ratings yet
- C EventsDocument1 pageC EventsAshok ChakravarthyNo ratings yet
- Classes - Soe.ucsc - Edu Cmps102 Fall01 Solutions 3Document3 pagesClasses - Soe.ucsc - Edu Cmps102 Fall01 Solutions 3Ashok ChakravarthyNo ratings yet
- 8051 Serial CommunicationDocument28 pages8051 Serial CommunicationDrWhoFNo ratings yet
- Classes - Soe.ucsc - Edu Cmps102 Fall01 Solutions2Document4 pagesClasses - Soe.ucsc - Edu Cmps102 Fall01 Solutions2Ashok ChakravarthyNo ratings yet
- Overview of H.264Document17 pagesOverview of H.264Ashok ChakravarthyNo ratings yet
- Classes - Soe.ucsc - Edu Cmps102 Fall01 Solutions2Document4 pagesClasses - Soe.ucsc - Edu Cmps102 Fall01 Solutions2Ashok ChakravarthyNo ratings yet
- Classes - Soe.ucsc - Edu Cmps102 Fall01 Solutions1Document4 pagesClasses - Soe.ucsc - Edu Cmps102 Fall01 Solutions1Ashok ChakravarthyNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Etbw-062 Bwms Cable Laying Book - Rev.aDocument6 pagesEtbw-062 Bwms Cable Laying Book - Rev.aRM HaroonNo ratings yet
- Green-Mode PWM Controller Reduces Audio NoiseDocument18 pagesGreen-Mode PWM Controller Reduces Audio NoisePaulo Roberto s freireNo ratings yet
- 140-710 BIMG 11 - 2012 - TCM - 12-114679Document144 pages140-710 BIMG 11 - 2012 - TCM - 12-114679AbdulNo ratings yet
- Manual Obs Ol4 PDFDocument76 pagesManual Obs Ol4 PDFCarlos Revilla FloresNo ratings yet
- h6 Brochure WebDocument9 pagesh6 Brochure WebMadanagopal ManiNo ratings yet
- Unit 4Document7 pagesUnit 4binukirubaNo ratings yet
- Scope of WorkDocument28 pagesScope of WorkShuhan Mohammad Ariful HoqueNo ratings yet
- W201 Wiring DiagramDocument290 pagesW201 Wiring Diagramilikemyfishbigandblue86% (44)
- Manual CarrierDocument220 pagesManual CarrierJuan Carlos Chapoñan SilvaNo ratings yet
- MRB 2301 PDFDocument8,123 pagesMRB 2301 PDFAnonymous VqdBeWV8ZNo ratings yet
- Precision Pliers 490-Bi... : Heavy Duty Side CutterDocument1 pagePrecision Pliers 490-Bi... : Heavy Duty Side CutterAkmalNo ratings yet
- Manual Servico Sony HCD Gpx5Document68 pagesManual Servico Sony HCD Gpx5Realmember FoxNo ratings yet
- E207E Sample Cylinders 0316Document1 pageE207E Sample Cylinders 0316bmanojkumar16No ratings yet
- Atril Director - Wenger - Flex Conductors Stand-Basket Acc - Assembly - 236C128Document2 pagesAtril Director - Wenger - Flex Conductors Stand-Basket Acc - Assembly - 236C128Produccion ProartesNo ratings yet
- Science 6 Quarter 3 Module 3Document8 pagesScience 6 Quarter 3 Module 3JAS SAJNo ratings yet
- Mpa 1600 VF 46288Document4 pagesMpa 1600 VF 46288Leonel Mejia LariosNo ratings yet
- Tot Halyester Manual 1.1 ENG PDFDocument118 pagesTot Halyester Manual 1.1 ENG PDFGautam LS0% (1)
- Autopilot Rotaryswitch - Maintenance PracticesDocument2 pagesAutopilot Rotaryswitch - Maintenance PracticesEleazarNo ratings yet
- Electro 3 PrefinalsDocument5 pagesElectro 3 PrefinalsJuan Miguel TorresNo ratings yet
- X11SNI&ODocument23 pagesX11SNI&Oprihartono_diasNo ratings yet
- ScionLife Check Engine Light CodesDocument10 pagesScionLife Check Engine Light CodesKiddNo ratings yet
- V0D0042305 Projector Services ManualDocument2 pagesV0D0042305 Projector Services ManualkastruiNo ratings yet
- Dervasil Route de Popenot - 42800 Saint Joseph - France Tel: +33 (0) 4 77 83 22 81 - Fax: +33 (0) 4 77 83 22 80Document48 pagesDervasil Route de Popenot - 42800 Saint Joseph - France Tel: +33 (0) 4 77 83 22 81 - Fax: +33 (0) 4 77 83 22 80Hồ ThànhNo ratings yet
- VOLTAR P086TI G-DRIVE SpecificationsDocument186 pagesVOLTAR P086TI G-DRIVE SpecificationsSilver SilverNo ratings yet
- Magna vf750c PDFDocument306 pagesMagna vf750c PDFAldair MartínezNo ratings yet
- LMC555 CMOS Timer: General Description FeaturesDocument8 pagesLMC555 CMOS Timer: General Description FeaturesDaryl ScottNo ratings yet
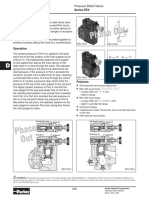
- Phase Out: Series R5V General Description Technical InformationDocument6 pagesPhase Out: Series R5V General Description Technical InformationkuncoroNo ratings yet
- Japan Auctions GradesDocument5 pagesJapan Auctions GradesAlzieNo ratings yet
- Sening® Nomix Cross-Over Prevention: We Put You First. and Keep You AheadDocument4 pagesSening® Nomix Cross-Over Prevention: We Put You First. and Keep You AheadJoseNo ratings yet
- HST-2 Expansion Anchor Technical DatasheetDocument11 pagesHST-2 Expansion Anchor Technical DatasheetThe KeymasterNo ratings yet