You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Microcontroller Viva Questions and AnswersDocument5 pagesMicrocontroller Viva Questions and Answerspankaj yadav100% (2)
- MicrocontrollerDocument23 pagesMicrocontrollerANKIT PATHAKNo ratings yet
- Elements of Computer SystemDocument3 pagesElements of Computer Systemheartpassion2585% (13)
- SPARC M7 Processor ArchitectureDocument17 pagesSPARC M7 Processor Architectureravi100% (4)
- A Tutorial On Parallel Port InterfacingDocument8 pagesA Tutorial On Parallel Port InterfacingNurul Hanim OmarNo ratings yet
- Microprocessor - Microprocessor FundamentalsDocument17 pagesMicroprocessor - Microprocessor FundamentalsTanveer Ahmed HakroNo ratings yet
- Assembly CodeDocument4 pagesAssembly CodeSyed Muhammad Ali MustafaNo ratings yet
- MSP 430 (Mixed Signal Processor)Document64 pagesMSP 430 (Mixed Signal Processor)Pradeepdarshan PradeepNo ratings yet
- CT10 Barcode Scanner Overview: WWW - Cilico.usDocument3 pagesCT10 Barcode Scanner Overview: WWW - Cilico.usFernando Escobar HernandezNo ratings yet
- 11.7.2.1 Common Problems and Solutions For Windows Operating SystemsDocument5 pages11.7.2.1 Common Problems and Solutions For Windows Operating SystemsgiorgiNo ratings yet
- Avr Memories: Figure 7-1. Program Memory Map Atmega328PDocument1 pageAvr Memories: Figure 7-1. Program Memory Map Atmega328PsalarNo ratings yet
- Chapter 8 - CPU PerformanceDocument40 pagesChapter 8 - CPU PerformanceNurhidayatul FadhilahNo ratings yet
- Unit 8 Part 1Document22 pagesUnit 8 Part 1josh smithNo ratings yet
- User Guide PIC18LF4550 Rev4A 08092008Document10 pagesUser Guide PIC18LF4550 Rev4A 08092008tzababagita936100% (1)
- 340S8 Service ManualDocument83 pages340S8 Service ManualPeter MugohNo ratings yet
- Simplex 4100ES 5 Days Customer TrainingDocument1 pageSimplex 4100ES 5 Days Customer TrainingBrahmantyo HadiprasetyoNo ratings yet
- Dell OptiPlex 7070 Micro Desktop: Save Time and Get Better Performance On Office TasksDocument5 pagesDell OptiPlex 7070 Micro Desktop: Save Time and Get Better Performance On Office TasksPrincipled TechnologiesNo ratings yet
- W170HNMDocument99 pagesW170HNMAnonymous v2h3uOUNo ratings yet
- Line PrinterDocument5 pagesLine PrinterGurpreet BansalNo ratings yet
- Computer Project My TeamDocument18 pagesComputer Project My TeamJyotsana AnandNo ratings yet
- Pos Ecig41bs (Diagramas - Com.br)Document29 pagesPos Ecig41bs (Diagramas - Com.br)José FrançaNo ratings yet
- Parts Reference List: Laser MFCDocument38 pagesParts Reference List: Laser MFCNebi aktaşNo ratings yet
- Rab Studio PhotohadiDocument7 pagesRab Studio PhotohadiDebbi SariNo ratings yet
- Inspiron 5480: Service ManualDocument78 pagesInspiron 5480: Service ManualJames DonNo ratings yet
- Microsoft-Case StudyDocument26 pagesMicrosoft-Case StudyHiten GuptaNo ratings yet
- POS Printer Driver V8.11 Installation Instruction ManualDocument20 pagesPOS Printer Driver V8.11 Installation Instruction ManualinformaticahmhaNo ratings yet
- Qoestionbankbigquestions 100109005829 Phpapp01Document4 pagesQoestionbankbigquestions 100109005829 Phpapp01Jamie SchultzNo ratings yet
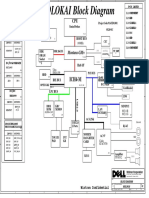
- Schematics Laptop Dell Inspiron 700m 710m Wistron MolokaiDocument39 pagesSchematics Laptop Dell Inspiron 700m 710m Wistron MolokaiFábio DominguesNo ratings yet
- DRAM PackagingDocument4 pagesDRAM Packagingrakista yec100% (1)
- T103 MockMTA Fall 2012 PDFDocument4 pagesT103 MockMTA Fall 2012 PDFIbrahimNo ratings yet