You might also like
- Control TheoryDocument11 pagesControl TheorySyedAhsanKamalNo ratings yet
- Control Theory - WikipediaDocument15 pagesControl Theory - WikipediaDAVID MURILLONo ratings yet
- Control Theories Commonly Used Today Are Classical Control TheoryDocument12 pagesControl Theories Commonly Used Today Are Classical Control TheoryJuliánNo ratings yet
- FeedCon (Unit 1)Document10 pagesFeedCon (Unit 1)Melissa LindayagNo ratings yet
- Control TheoryDocument12 pagesControl TheorymCmAlNo ratings yet
- 1 - Introduction To Control SystemsDocument11 pages1 - Introduction To Control SystemsKenzie WalipiNo ratings yet
- controlICS CH1Document5 pagescontrolICS CH1Magarsaa Qana'iiNo ratings yet
- 4 Mechantronics and ApplicationsDocument11 pages4 Mechantronics and Applicationssamsonit1No ratings yet
- DSRSSTMKNDL 2Document27 pagesDSRSSTMKNDL 2Yesi Indri HeryaniNo ratings yet
- Control TheoryDocument10 pagesControl TheoryAnonymous E4Rbo2sNo ratings yet
- Control Systems OverviewDocument19 pagesControl Systems OverviewTaku Teekay MatangiraNo ratings yet
- Control Systems Modeling FundamentalsDocument24 pagesControl Systems Modeling FundamentalsSiva Bala KrishnanNo ratings yet
- ME55 CONTROL ENGINEERINGDocument7 pagesME55 CONTROL ENGINEERINGManasa Sathyanarayana SNo ratings yet
- Controlling an Inverted Pendulum Using FeedbackDocument17 pagesControlling an Inverted Pendulum Using FeedbackAnonymous KhhapQJVYtNo ratings yet
- Closed Loop Control System ExplainedDocument6 pagesClosed Loop Control System ExplainedMUHAMMAD AKRAMNo ratings yet
- 1 - Introduction To Control Chapter OneDocument13 pages1 - Introduction To Control Chapter Onesythepaul24No ratings yet
- Industrial Control Chapter 1Document19 pagesIndustrial Control Chapter 1Qayyum AqasyahNo ratings yet
- Control Systems - NotesDocument61 pagesControl Systems - NotesNarasimha Murthy YayavaramNo ratings yet
- ContDocument95 pagesContMilion dugumaNo ratings yet
- Control Systems - 1Document18 pagesControl Systems - 1H. ZNADNo ratings yet
- Control Systems NotesDocument74 pagesControl Systems NotesNirjal RanipaNo ratings yet
- Control EngineeringDocument5 pagesControl EngineeringAliceAlormenuNo ratings yet
- Nonlinear Control of Underactuated SystemsDocument307 pagesNonlinear Control of Underactuated SystemsszepesvaNo ratings yet
- Autotronics and Vehicle Intelligence : Aeng6205Document25 pagesAutotronics and Vehicle Intelligence : Aeng6205Abubaker MuzayinNo ratings yet
- Introduction To Control SystemDocument33 pagesIntroduction To Control Systemmarina890416No ratings yet
- Alvarez Johndave Bsece412 Ass#1Document4 pagesAlvarez Johndave Bsece412 Ass#1MelanieNo ratings yet
- Pe-3032 WK 1 Introduction To Control System March 04Document70 pagesPe-3032 WK 1 Introduction To Control System March 04Charlton S.Inao100% (2)
- Week 1 - Intro To Control SystemsDocument45 pagesWeek 1 - Intro To Control SystemsArkie BajaNo ratings yet
- Introduction To Control Systems: Theme 1Document16 pagesIntroduction To Control Systems: Theme 1Murphy's LawNo ratings yet
- Introduction To Control Systems-Student-2021 - 2022 NewDocument885 pagesIntroduction To Control Systems-Student-2021 - 2022 NewAkpevwe Isire100% (1)
- Control SystemsDocument12 pagesControl Systemsoyebowale.emmanuelNo ratings yet
- Control Systems Notes DEE M2 JuneDocument34 pagesControl Systems Notes DEE M2 JuneThairu MuiruriNo ratings yet
- Lecture - 1 AutomaticsDocument24 pagesLecture - 1 AutomaticsaliNo ratings yet
- SKEE 3133 Chapter 1 RevisedDocument56 pagesSKEE 3133 Chapter 1 RevisedMuhammad Zul HilmieNo ratings yet
- Pe 3032wk1introductiontocontrolsystemmarch04e 141007091431 Conversion Gate01Document69 pagesPe 3032wk1introductiontocontrolsystemmarch04e 141007091431 Conversion Gate01OkingszackNo ratings yet
- EE2253 Control Systems NotesDocument124 pagesEE2253 Control Systems NotesrameshsmeNo ratings yet
- Systems TheoryDocument195 pagesSystems Theorydelenda3No ratings yet
- Chapter 7 Buku NelsonDocument6 pagesChapter 7 Buku Nelsoncatia asdosNo ratings yet
- Control Systems Lecture NotesDocument70 pagesControl Systems Lecture NotesPrathamraj ChauhanNo ratings yet
- Lecture 1 Control SystemsDocument21 pagesLecture 1 Control SystemsMahrukh Mumtaz Hussain100% (1)
- Modeling and Control of A Rotary Inverted PendulumDocument6 pagesModeling and Control of A Rotary Inverted PendulumsalmanNo ratings yet
- Doc24 Control SystemsDocument208 pagesDoc24 Control SystemsRaluca ComanescuNo ratings yet
- 3-1 Control System PresentationDocument361 pages3-1 Control System PresentationBhavsingh Dharavath0% (1)
- PPT Teknik PengaturanDocument16 pagesPPT Teknik Pengaturankapontori098No ratings yet
- Chapter01 - Introduction To Control SystemDocument9 pagesChapter01 - Introduction To Control SystemNdidiamaka Nwosu AmadiNo ratings yet
- Ece IV Control Systems (10es43) Notes1Document205 pagesEce IV Control Systems (10es43) Notes1Nithindev GuttikondaNo ratings yet
- Control Theory ModulesDocument27 pagesControl Theory ModulesSushmita KujurNo ratings yet
- Dynamical System ModelDocument47 pagesDynamical System ModelYeimy QuevedoNo ratings yet
- Control System18EE61Document111 pagesControl System18EE61Jose Alex MathewNo ratings yet
- EE2253 NotesDocument124 pagesEE2253 NotesSiva Kathikeyan100% (1)
- Control System Engineering - IDocument212 pagesControl System Engineering - IAjit Kumar Kisku100% (1)
- Adaptive Fuzzy Controller: Application To The Control of The Temperature of A Dynamic Room in Real TimeDocument18 pagesAdaptive Fuzzy Controller: Application To The Control of The Temperature of A Dynamic Room in Real TimeLittle ChickNo ratings yet
- Learning Outcomes:: Control System DefinitionDocument7 pagesLearning Outcomes:: Control System DefinitionSafitriNo ratings yet
- State Observer - Wikipedia, The Free EncyclopediaDocument6 pagesState Observer - Wikipedia, The Free EncyclopediaNhà Của CọpNo ratings yet
- CS Basic1Document12 pagesCS Basic1mansoorNo ratings yet
- A Control Engineer's Guide To Sliding Mode ControlDocument15 pagesA Control Engineer's Guide To Sliding Mode ControlatommotaNo ratings yet
- Energetic Processes in Follow-Up Electrical Control Systems: International Series of Monographs on Electronics and InstrumentationFrom EverandEnergetic Processes in Follow-Up Electrical Control Systems: International Series of Monographs on Electronics and InstrumentationNo ratings yet
- 1111 3886Document58 pages1111 3886Joon Suk HuhNo ratings yet
- Supersymmetry in Quantum OpticsDocument10 pagesSupersymmetry in Quantum OpticsJoon Suk HuhNo ratings yet
- Programming EnvironmentDocument11 pagesProgramming EnvironmentJoon Suk HuhNo ratings yet
- Bethe AnsatzDocument59 pagesBethe AnsatzJoon Suk HuhNo ratings yet
- IntegrbilityDocument31 pagesIntegrbilityJoon Suk HuhNo ratings yet
- Supersymmetry in Quantum OpticsDocument10 pagesSupersymmetry in Quantum OpticsJoon Suk HuhNo ratings yet
- Group Theory For Physicists - Christoph LudelingDocument123 pagesGroup Theory For Physicists - Christoph LudelingteolsukNo ratings yet
- Gauge Field Theory of Folded ProteinsDocument6 pagesGauge Field Theory of Folded ProteinsJoon Suk HuhNo ratings yet
- Lecture 1Document10 pagesLecture 1Joon Suk HuhNo ratings yet
- 1203 6064v3Document34 pages1203 6064v3Joon Suk HuhNo ratings yet
- E00Document8 pagesE00Joon Suk HuhNo ratings yet
- 1001 3871v2Document118 pages1001 3871v2Joon Suk HuhNo ratings yet
- Einstein's Brownian Motion Formula to Calculate Avogadro's NumberDocument2 pagesEinstein's Brownian Motion Formula to Calculate Avogadro's NumberJoon Suk HuhNo ratings yet
- Lattice Gauge TheoryDocument4 pagesLattice Gauge TheoryJoon Suk HuhNo ratings yet
- Drescher - Demystifying Quantum PDFDocument32 pagesDrescher - Demystifying Quantum PDFSrijit SanyalNo ratings yet
- ELEN3017A Project Brief 2022 Rev2Document3 pagesELEN3017A Project Brief 2022 Rev2Dick MabhidaNo ratings yet
- DPWH Design Assessment ChecklistDocument18 pagesDPWH Design Assessment ChecklistGeovanni DumpasanNo ratings yet
- Preparation Exam API 510:N°01 QuestionsDocument3 pagesPreparation Exam API 510:N°01 QuestionskorichiNo ratings yet
- Astm-e855 Изгиб МеталлаDocument8 pagesAstm-e855 Изгиб МеталлаАлесь БуяковNo ratings yet
- Preventing Generator Damage from Hydrogen MoistureDocument27 pagesPreventing Generator Damage from Hydrogen MoistureIskerNo ratings yet
- Materials Refractive Index and Extinction CoefficientDocument276 pagesMaterials Refractive Index and Extinction CoefficientDr-Mandeep SinghNo ratings yet
- Deswik 1Document94 pagesDeswik 1Daniel Alcides Arias Rafael100% (2)
- Introduction To AcousticsDocument4 pagesIntroduction To AcousticsClarence MamucodNo ratings yet
- 19Ma2Icmat Module 5 - Elementary Numerical MethodsDocument4 pages19Ma2Icmat Module 5 - Elementary Numerical Methods1DS19CH011 Jashwanth C RNo ratings yet
- Surge Current Protection Using SuperconductorDocument25 pagesSurge Current Protection Using SuperconductorAbhishek Walter PaulNo ratings yet
- Practical 4 - Signpost 2011Document4 pagesPractical 4 - Signpost 2011Percy Percival50% (2)
- Skripsi #2 Tanpa HyperlinkDocument19 pagesSkripsi #2 Tanpa HyperlinkindahNo ratings yet
- Project PBLDocument19 pagesProject PBLAdam LuqmanNo ratings yet
- RWM61 Data SheetDocument3 pagesRWM61 Data SheetBarth XaosNo ratings yet
- Transient Step Response Specification of Z-Source DC-DC ConverterDocument5 pagesTransient Step Response Specification of Z-Source DC-DC ConverterijsretNo ratings yet
- Lab 2 Centrifugal PumpsDocument29 pagesLab 2 Centrifugal PumpslalelaNo ratings yet
- Narayana Iit Academy India: Paper - IDocument39 pagesNarayana Iit Academy India: Paper - Iaatt aattNo ratings yet
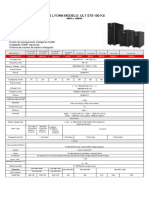
- Ups Lyonn Modelo: Ult St5-100 KS: 10KVA A 120KVADocument1 pageUps Lyonn Modelo: Ult St5-100 KS: 10KVA A 120KVASebastian Matias CruzNo ratings yet
- Carbohydrates Explained: Monosaccharides, Disaccharides and PolysaccharidesDocument21 pagesCarbohydrates Explained: Monosaccharides, Disaccharides and PolysaccharidesJhayce Christian S. CapanayanNo ratings yet
- PI ControllerDocument5 pagesPI Controllerdanuega1No ratings yet
- The Interpretive TheoryDocument15 pagesThe Interpretive TheorySomia Zergui100% (14)
- hw12 ch11 2Document27 pageshw12 ch11 2Angela EvansNo ratings yet
- Manual ApolloDocument263 pagesManual ApolloJose Luis CristanchoNo ratings yet
- Hydrogen in 1 ShotDocument86 pagesHydrogen in 1 ShotSaloum Muhammed Islam0% (1)
- Innovative Injection Rate Control With Next Generation Common Rail Fuel Injection SystemDocument8 pagesInnovative Injection Rate Control With Next Generation Common Rail Fuel Injection SystemRakesh BiswasNo ratings yet
- Tapered Vector Spiral in InkscapeDocument5 pagesTapered Vector Spiral in InkscapejeanNo ratings yet
- A Greener, Biocatalytic Benzoin Synthesis: Kenyon College - CHEM 234 - Organic Chemistry Lab IIDocument2 pagesA Greener, Biocatalytic Benzoin Synthesis: Kenyon College - CHEM 234 - Organic Chemistry Lab IINicalyn BolanteNo ratings yet
- Mathematical Induction, Peano Axioms, and Properties of Addition of Non-Negative IntegersDocument13 pagesMathematical Induction, Peano Axioms, and Properties of Addition of Non-Negative IntegersMarius PaunescuNo ratings yet
- A Short Guide To Arrows in ChemistryDocument1 pageA Short Guide To Arrows in ChemistryJefferson RibeiroNo ratings yet
- Guide For Dynamic Report Generator - EndsfsdfsdfsdfsdfDocument15 pagesGuide For Dynamic Report Generator - Endsfsdfsdfsdfsdfmtech structuresNo ratings yet