Professional Documents
Culture Documents
Algoritmos Robot Flujo Optico
Uploaded by
Jonathan Bobadilla VillegasCopyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Algoritmos Robot Flujo Optico
Uploaded by
Jonathan Bobadilla VillegasCopyright:
Available Formats
ALGORITMOS ESTABLES PARA LA NAVEGACION DE ROBOTS MOVILES EN PASILLOS USANDO
EL FLU1O OPTICO
Ricardo Carelli, Humberto Secchi, Vicente Mut, Oscar Nasisi
Instituto de Automatica - INAUT - Universidad Nacional de San Juan
Av. San Martin Oeste 1109, San Juan, Argentina.
Fax. 54-264-4213672
e-mail. rcarelliinaut.unsf.edu.ar
Palabras clave : robots moviles, control de robots, Ilujo optico, vision artiIicial, sistemas no lineales.
Resumen
En este trabajo se presenta un algoritmo basado en el Ilujo optico, para el control del movimiento de
robots moviles que navegan en pasillos. Este algoritmo, a diIerencia de otros propuestos en la
bibliograIia, requiere la utilizacion de una sola camara de video. El algoritmo propuesto conduce a un
sistema de control con convergencia asintotica de los errores de control a cero. El mismo se basa en
igualar el Ilujo optico en dos ventanas laterales de la imagen con sus respectivas reIerencias, y en el
conocimiento de la cinematica no lineal que describe la relacion entre el movimiento del robot y el Ilujo
optico resultante, aplicando el metodo de linealizacion por realimentacion. Se presentan resultados de
simulacion para mostrar el desempeo del sistema de control propuesto.
1. Introduccin
Los vehiculos autoguiados o tambien denominados
robots moviles, operando en grandes ambientes no
estructurados, deben enIrentarse con signiIicativas
incertidumbres en la posicion e identiIicacion de objetos.
Esto hace que trasladarse entre dos puntos del espacio de
trabajo constituya una actividad arriesgada para un
vehiculo autoguiado. Por otra parte, por la naturaleza de
las tareas asociadas, no se requiere un alto grado de
precision en las trayectorias o posiciones Iinales que
debe alcanzar el vehiculo.
El principal problema a resolver en un vehiculo
autoguiado es generar trayectorias y guiarlo segun estas
en base a la inIormacion proveniente del sistema de
sensores externos (ultrasonidos, vision, etc.),
permitiendo desplazarse entre dos puntos de manera
segura y sin colisiones. Esto exige disear sistemas de
control de trayectorias (posicion, direccion, velocidad)
en diversos niveles jerarquicos, de manera que el
procesamiento de la inIormacion proveniente de los
sensores asegure la mayor autonomia posible.
Las aplicaciones de estos vehiculos estan
relacionadas con tareas riesgosas o nocivas para la salud
e integridad Iisica, como son el transporte y acopio de
materiales en ambientes automatizados, el traslado de
elementos explosivos en el area industrial, la exploracion
de ambientes con atmosIeras nocivas, como asi tambien
la realizacion de tareas repetitivas y monotonas en el
area industrial y administrativa. En todos estos casos se
suele dar una situacion comun: la navegacion en pasillos.
Se han propuesto algoritmos para la navegacion en
pasillos basados en la utilizacion de la vision artiIicial.
En (Erizera et al., 1998) se utiliza el procesamiento de
imagenes a Iin de detectar lineas de perspectiva
convergentes para gobernar la navegacion del vehiculo.
En (Santos Victor et al., 1995) se utilizan dos camaras y
el calculo del Ilujo optico para gobernar la navegacion
en pasillos emulando la estrategia de vuelo de las abejas.
El Ilujo optico puede deIinirse como la distribucion de la
velocidad de movimiento aparente de los patrones de
brillo de una imagen. La utilizacion del Ilujo optico
aparece como una alternativa interesante para determinar
el movimiento relativo y la posicion de objetos en
relacion a la camara de video. Esto puede aprovecharse
para guiar el vehiculo en ambientes parcialmente
estructurados (Dev et al., 1997). En general en los
trabajos mencionados no se presentan pruebas de
estabilidad para los algoritmos de control propuestos.
En este trabajo se propone un algoritmo original
basado en el Ilujo optico, para el control del movimiento
de robots moviles que navegan en pasillos. Este
algoritmo, a diIerencia de otros propuestos en la
bibliograIia, requiere la utilizacion de una sola camara
de video. Ademas se prueba la estabilidad del sistema de
control no lineal resultante. El algoritmo de control
propuesto se basa en igualar el Ilujo optico en dos
ventanas laterales de la imagen con sus respectivas
reIerencias, y en el conocimiento de la cinematica no
lineal que describe la relacion entre el movimiento del
robot y el Ilujo optico resultante, aplicando el metodo de
linealizacion por realimentacion. Einalmente se
presentan resultados de simulacion para mostrar el
desempeo del sistema de control propuesto.
2. Flujo ptico
El Ilujo optico (Gibson, 1950; Gibson, 1966 se deIine
como la distribucion de la velocidad de movimiento
aparente de los patrones de brillo de una imagen. El Ilujo
optico se produce por el movimiento relativo entre los
objetos y el observador. En consecuencia, el Ilujo optico
puede proveer inIormacion sobre el arreglo espacial de
los objetos observados y la velocidad de cambio de ese
arreglo (Gibson, 1977), asi como puede contribuir a la
segmentacion de imagenes basada en la deteccion de las
discontinuidades del Ilujo optico.
Si se denomina t) y, I(x, al brillo del punto con
coordenadas y x, en la imagen en el instante t , el brillo
en el instante t t G + del punto que ocupaba la posicion
y x, en el instante t , sera ) , , ( t t v v x x I G G G + + + .
El vector,
|
.
|
\
|
=
) , (
) , (
v x v
v x u
F
constituye el vector del Ilujo optico. Ademas resulta
t v v
t u x
G G
G G
=
=
Se asumira por simplicidad que la velocidad aparente
de los patrones de brillo de la imagen se identiIican
directamente con el movimiento de las superIicies en el
espacio (no hay variaciones debido a la iluminacion), y
esta relacion es simplemente geometrica. Ademas se
asume que el brillo varia uniIormemente y no hay
discontinuidades, lo que permite aIirmar que la Iuncion
de brillo I es diIerenciable. Estas suposiciones implican
superIicies planas, iluminacion uniIorme y evitar las
situaciones de oclusion de un objeto por otro.
Hipotesis (brillo constante): Para pequeos
desplazamientos, el brillo de un punto que se mueve en
la imagen, permanece constante:
0 =
dt
dI
o bien, en el dominio discreto:
) , , ( ) , , ( t v x I t t v v x x I = + + + G G G
La interpretacion en el dominio continuo resulta,
0 =
c
c
+
c
c
+
c
c
t
I
dt
dv
v
I
dt
dx
x
I
donde u
dt
dx
= , v
dt
dv
= . Usando la notacion
t
I
v
I
x
I , ,
para las derivadas parciales resulta:
0 = + +
t
I v
v
I u
x
I
La ecuacion anterior establece una restriccion en las
componentes horizontal y vertical del Ilujo optico, que
es Iuncion de las derivadas de primer orden espacio-
temporales de la Iuncion de brillo de la imagen. Esta
restriccion puede expresarse como el producto interno de
los vectores de Ilujo optico F y el gradiente espacial de
la imagen I V :
t
I F
T
I v u
v
I
x
I = V = . ) , ).( , (
Esta ecuacion restringe el Ilujo optico a una linea
perpendicular al gradiente espacial de la imagen.
Descomponiendo el vector de Ilujo en las
componentes paralela y normal a los contornos o lineas
de equibrillo de la imagen:
n
F
p
F
n
v u
p
v u v u + = + = ) , ( ) , ( ) , (
puede aplicarse la ecuacion de la restriccion y resulta:
t
I
n
F
T
I F
T
I = V = V . .
o bien, en modulo:
I
t
I
n
F
V
=
Se concluye que con las derivadas de primer orden
(
t
I
v
I
x
I , , ), solo puede determinarse la componente del
Ilujo optico en la direccion del gradiente espacial de la
imagen, esto es
n
F . Esto se denomina el problema de
apertura, ya que se puede interpretar considerando que
la inIormacion de brillo en un punto no soluciona la
determinacion de las dos incognitas del problema v u, a
menos que se consideren otras restricciones que incluyan
inIormacion de la vecindad del punto. El termino
apertura proviene de que al ver un solo punto, no se tiene
apertura visual hacia los vecinos. Eisicamente, si vemos
la imagen por un tubo que nos permite ver un solo punto,
tendremos sensacion de la direccion del movimiento
pero no de sus componentes.
El vector de Ilujo normal se calcula como:
2 2
) , (
v
I
x
I
t
I
v
I
t
I
x
I
I
I
I
t
I
n
F
+
=
V
V
V
=
Con la restriccion descripta precedentemente, el
problema de determinar el Ilujo optico no tiene solucion
unica. Para solucionar este problema, se imponen
condiciones adicionales como por ejemplo de suavidad
del Ilujo optico, que en realidad establecen una
correlacion entre valores en un punto de la imagen y sus
vecinos. La Iuncional que pesa la desviacion de la
condicion de suavidad es (Horn y Schunk,1980),
))
)
`
+ + + = +
I
dv dx
v
v
x
v
v
u
x
u
s
)
2 2
( )
2 2
(
que penaliza las variaciones rapidas del Ilujo optico. La
otra parte del Iuncional de costo penaliza las violaciones
a la restriccion de brillo constante:
))
+ + = +
I
dv dx
t
I v
v
I u
x
I
b
2
) (
La Iuncional de costo completa es:
b s
+ + + = +
2
D
donde se combina una medida de suavidad y una medida
de la constancia del brillo con un coeIiciente (D ) de
balance entre ambas medidas.
Del calculo variacional, puede transIormarse este
Iuncional en un par de ecuaciones diIerenciales,
denominadas ecuaciones de Euler:
v
I
t
I v
v
I u
x
I v
x
I
t
I v
v
I u
x
I u
) (
2 2
) (
2 2
+ + = V
+ + = V
D
D
donde:
vv
v
xx
v v
vv
u
xx
u u
+ = V
+ = V
2
2
Usando metodos de diIerencia Iinita pueden
reemplazarse los Laplacianos u
2
V y v
2
V asi como las
estimas discretas de las derivadas parciales de la Iuncion
de brillo
t
I
v
I
x
I , , para obtener la resolucion iterativa
de la solucion optima a partir de estas ecuaciones de
Euler.
Existen otros metodos para el calculo del Ilujo optico
completo, en (Barron et al., 1994) se hace un estudio
comparativo de distintos metodos.
3. Modelo del sistema robot mvil y la cmara de
video.
3.1 Modelo para la camara en movimiento
Para la obtencion de las relaciones cinematicas de la
camara en movimiento con velocidad traslacional T y
rotacional Z , se considera el modelo de proyeccion
perspectiva o de camara de pequeo oriIicio (pinhole).
La ecuacion de Coriolis da el movimiento de un punto
P en un sistema de coordenadas con movimiento
traslacional y rotacional es:
P T P = Z
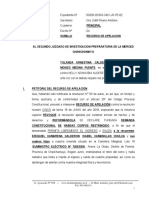
Para modelo de camara de pequeo oriIicio se tiene
la siguiente relacion de proyeccion -ver Iigura 1-,
:
P
P r
=
O
donde r es la proyeccion de P en el plano de la imagen
y O es la distancia Iocal de la camara. Derivando
respecto del tiempo resulta,
P
:
P T
:
P
P T
:
P
P
:
P
:
P
:
P
P
r
) (
2
) (
2
=
=
Z
O
Z
O
O O
El desarrollo del producto vectorial es,
k
v v
P
x
f
:
P
x x
P
:
i
v
P
: :
P
v
P
) ( ) (
) (
Z Z Z Z
Z Z Z
+ +
+ =
donde k f i , , son los versores en las direcciones : v x , , .
A partir de las ecuaciones anteriores, la componente
del campo en movimiento en la direccion x es,
x
P
x
P
v v
P
x :
T
:
P
v
P
: :
P
v x
T
:
P
x
r
) (
2
) (
Z Z
O
Z Z
O
=
x
P
v
P
:
:
P
x
P
v
:
P
x
P
:
P
v
P
x
:
P
x
P
:
P
:
T
:
P
x
T
x
r
O Z O Z
OZ O O
+
+ + =
)
2
2
(
Considerando las siguientes relaciones de propor-
cionalidad - ver la Iigura 1-,
O O
:
P
v
r
v
P
:
P
x
r
x
P
= = ;
puede escribirse Iinalmente,
v
r
:
x
r
v v
r
x
r
x
:
P
:
T
x
r
x
T
x
r Z
O
O Z
O
Z O
+ +
+
= )
2
(
Eigura 1.
De manera similar,
x
r
: v
r
x
r
v v
r
x
:
P
:
T
v
r
v
T
v
r Z
O
Z
O
O Z
O
+ +
+
= )
2
(
Para la camara montada solidariamente a un robot
movil tal que su orientacion coincida con la direccion de
avance del robot, se veriIica que 0 = =
v
T
x
T
(movimiento de traslacion Irontal solamente) y
0 = =
: x
Z Z (rotacion normal al plano del piso
solamente). Entonces las ecuaciones cinematicas de la
camara solidaria al robot en movimiento resultan,
)
2
(
O
O Z
x
r
v
:
P
:
T
x
r
x
r + =
) (
v
r
x
r
v
:
P
:
T
v
r
v
r
O
Z
=
3.2 Modelo del robot movil.
La cinematica de un robot movil del tipo uniciclo
(dos ruedas motrices independientes), Iigura 2, esta
expresada por la siguiente ecuacion
|
|
.
|
\
|
|
|
|
|
.
|
\
|
=
|
|
.
|
\
|
2
1 2 2
q
q
a
b
a
b
b b
v
:
T
Z
Para los motores que accionan las ruedas motrices
del robot se considera el siguiente modelo dinamico,
2 , 1 ,
1
=
+
= i
i
v
s
m
T
m
K
i
q
donde
i
v es la tension en los motores y
i
q la velocidad
de rotacion de las ruedas.
Eigura 2.
4. Algoritmo de control propuesto
4.1 Idea para el control.
La propuesta de control para navegacion en pasillos
usando el Ilujo optico consiste en observar el Ilujo optico
en dos puntos (o regiones) de la imagen simetricos
respecto del eje v ,
2 1 x
r
x
r = , Iigura 3.
Las ecuaciones de la camara aplicadas al calculo del
Ilujo horizontal en estos puntos,
)
2
1
(
1
1
2
)
2
1
(
1
1
1
O
O Z
O
O Z
x
r
v
:
P
:
T
x
r
x
r
x
r
v
:
P
:
T
x
r
x
r
+ =
+ =
Eigura 3.
Se propone hacer
2 1 x
r
x
r = . Entonces,
)
2
1
( 2 )
2
1
1
1
(
1
O
O Z
x
r
v
:
P
:
P
:
T
x
r + = .
Si ademas la rotacion del robot es nula, 0 =
v
Z ,
entonces resulta
2 1 :
P
:
P = , lo cual signiIica que el robot
esta posicionado en el centro del pasillo. Para valores de
Ilujo distintos se obtienen posiciones distintas del centro
del pasillo.
Ademas, de las ecuaciones del Ilujo optico en los
puntos
2 1 x
r
x
r = ,
2
2
1
1
2 , 1 x
r
x
r
x
r
x
r
:
P
:
T
= =
Para el control resulta importante mantener esta
velocidad relativa
:
:
P
T
constante, pues conduce a un
movimiento "cauteloso", esto es, a pasillos mas
estrechos (
:
P menor), resultan velocidades de avance
:
T menores.
4.2 Modelo del sistema robot-camara.
Ahora, antes de describir la ley de control propuesta,
se obtiene el modelo del sistema robot-camara que
describe la relacion entre el Ilujo optico en los puntos
2 1 x
r
x
r = y la velocidad de las ruedas del robot movil
2
,
1
q q . La ecuacion cinematica del robot obtenida en el
punto anterior es,
|
|
.
|
\
|
=
|
|
.
|
\
|
|
|
|
|
.
|
\
|
=
|
|
.
|
\
|
2
1
.
2
1 2 2
q
q
CIN
q
q
a
b
a
b
b b
v
:
T
Z
El modelo del sistema de vision para el Ilujo
horizontal medido en
2 1 x
r
x
r = es,
|
|
.
|
\
|
=
|
|
.
|
\
|
|
|
|
|
|
|
|
.
|
\
|
+
+
=
|
|
.
|
\
|
v
:
T
TJ
v
:
T
x
r
:
P
x
r
x
r
:
P
x
r
x
r
x
r
Z Z
O
O
O
O
.
)
2
1
(
2
2
)
2
1
(
1
1
2
1
Combinando ambas ecuaciones,
|
|
.
|
\
|
=
|
|
.
|
\
|
=
|
|
.
|
\
|
2
1
.
2
1
. .
2
1
q
q
J
q
q
CIN TJ
x
r
x
r
donde,
CIN TJ J . =
|
|
|
|
|
|
|
.
|
\
|
+ + +
+ + +
=
)
2
2
(
2
2
2
)
2
2
(
2
2
2
)
2
1
(
1
1
2
)
2
1
(
1
1
2
O
O
O
O
O
O
O
O
x
r
a
b
:
P
x
r
b
x
r
a
b
:
P
x
r
b
x
r
a
b
:
P
x
r
b
x
r
a
b
:
P
x
r
b
J
Su derivada temporal, que sera de utilidad en el
algoritmo de control, toma el siguiente valor si se tiene
en cuenta que
2
,
1 x
r
x
r son constantes,
|
|
|
|
|
|
|
.
|
\
|
=
2
2
2
2
2 2
2
2
2
2
2
1
1
1
2 2
1
1
1
2
:
P
:
P
x
r
b
:
P
:
P
x
r
b
:
P
:
P
x
r
b
:
P
:
P
x
r
b
J
La obtencion de
2
,
1 :
P
:
P necesarias en las expresiones
de J y J
, se realiza a partir del modelo del sistema de
vision y recordando que
1 2 x
r
x
r = ,
v
x
r
x
r
:
T
x
r
:
P
Z
O
O )
2
1
(
1
1
1
+ +
=
v
x
r
x
r
:
T
x
r
:
P
Z
O
O )
2
1
(
2
1
2
+ +
=
Por otra parte, la obtencion de
2
,
1 :
P
:
P
necesarias
en la expresion de J
se obtiene de la ecuacion de
Coriolis, seccion 3, recordando que para el robot solo se
tiene
v
Z ,
2 2
1 1
x
P
v :
T
:
P
x
P
v :
T
:
P
Z
Z
+ =
+ =
donde
2
,
1 x
P
x
P se obtienen de relaciones geometricas,
ver Iigura 2, como
2
2
2
1
1
1
x
r
:
P
x
P
x
r
:
P
x
P
O
O
=
=
4.3 Lev de control.
Considerando solo la dinamica de los motores,
) (
1
q
m
T q
m
K
v + =
donde )
2
,
1
( q q
T
q = . Ademas,
q J q J r
q J r
+ =
=
Reemplazando q en la ecuacion dinamica de los
motores,
q J J
m
K
m
T
q
m
K
r J
m
K
m
T
v
1
1
1
+
=
Se propone una ley de dinamica inversa,
r J J J
m
K
m
T
r J
m
K
r
e
p
K
d
r J
m
K
m
T
v
1 1 1
1
) (
1
:
+
+
=
donde se ha sustituido q por r J
1
y se ha deIinido el
error r
d
r
r
e
= . La ecuacion de lazo cerrado resulta
de igualar las ecuaciones del sistema y de la ley de
control,
0 = +
=
r
e
p
K
r
e
r
e
p
K
d
r r
La ecuacion anterior implica, con 0 >
p
K
,
0 ) ( t
r
e
con t
De lo observado al comienzo de esta seccion, se ha
visto que el cumplimiento del objetivo de navegacion del
robot movil implica el cumplimiento del objetivo de
control deIinido sobre el Ilujo optico. La pregunta ahora
es si el cumplimiento del objetivo de control expresado
por la ecuacion anterior y garantizado por el controlador
propuesto, se corresponde siempre con el objetivo de
navegacion. Supongase que se veriIica la ecuacion
mencionada.
Suposicion (objetivo de control alcanzable): Existe
|
|
.
|
\
|
=
2
1
d
q
d
q
d
q
tal que 0 =
r
e
.
Como q J r = , tambien
q
Je
r
e
= con q
d
q
q
e
= .
Si J es invertible, entonces
r
e J
q
e
1
=
Si ademas
1
J esta acotado (o bien J esta Iuera de
un entorno de cero), y asi ocurre en la operacion Iisica de
un robot movil como se ve en el apartado siguiente, de la
ecuacion anterior resulta,
0 0 ) (
q
e t
r
e
Para navegacion rectilinea a lo largo del pasillo,
2 1 d
q
d
q =
Entonces, 0 , 0 = =
q
e
r
e
implica el cumplimiento del
objetivo de navegacion del robot movil.
4.4 Singularidad del Jacobiano J .
El algoritmo de control utiliza la inversa del
Jacobiano. Es importante estudiar las condiciones bajo
las cuales el Jacobiano puede ser singular y por
consiguiente no invertible. En las singularidades 0 = J ,
lo que implica,
2
1
)
2
1
(
2
2
)
2
2
(
1
2
:
P
:
P
x
r
a
b
x
r
b
x
r
a
b
x
r
b
=
+
+
O
O
O
O
Si
1 2 x
r
x
r = ,
2 1 :
P
:
P = .
Entonces la condicion de Jacobiano singular es
imposible de veriIicar para el planteo de control
propuesto.
5 Resultados de simulacin
En esta seccion se muestran los resultados de
simulacion al aplicar el algoritmo propuesto a un robot
del tipo monociclo. Las condiciones del experimento de
simulacion son las siguientes: s m
x
r / 05 , 0 = ,
m 008 , 0 = O , m
x
r 008 , 0 = , y las condiciones iniciales
rad m v m x 3 , 0 ) 0 ( , 5 , 0 ) 0 ( , 0 ) 0 ( = = = M (orientacion ini-
cial). O sea que el robot comienza en una posicion
diIerente del centro del pasillo y con orientacion inicial
tambien distinta de cero.
En las Iiguras 4, 5 y 6 se muestran los resultados de
la trayectoria, la evolucion del Ilujo optico y la velocidad
del robot, cuando se usa una ganancia de control
10 =
p
K . Por otra parte en las Iiguras 7, 8 y 9 se
muestran los resultados cuando la ganancia es
100 =
p
K . Se observa el eIecto de aumentar la ganancia
de control en la estabilidad relativa del comportamiento
del robot. Para la ganancia de 10, la respuesta es muy
satisIactoria e incluso se observa la capacidad del robot
de girar en una esquina del pasillo, utilizando la misma
estrategia descripta para la navegacion a lo largo del
pasillo.
0 2 4 6 8 10 12 14
-2
0
2
4
6
8
10
12
K=10
x [m]
z [m]
Eigura 4.
0 1 2 3 4 5 6 7
-0.2
-0.15
-0.1
-0.05
0
flujo ptico
t [s]
0 1 2 3 4 5 6 7
-0.02
0
0.02
0.04
0.06
0.08
t [s]
izquierda
derecha
Eigura 5.
0 1 2 3 4 5 6 7
0
1
2
3
4
5
6
velocidad
t [s]
m/s
0 1 2 3 4 5 6 7
-0.02
0
0.02
0.04
0.06
0.08
t [s]
rad/s
Eigura 6.
0 2 4 6 8 10 12 14
-2
0
2
4
6
8
10
12
x [m]
z [m]
K=100
Eigura 7.
6 Conclusiones
En este trabajo se ha propuesto una estrategia de control
de robots moviles en pasillos utilizando el calculo del
Ilujo optico a partir de imagenes tomadas por una unica
camara de video montada en el vehiculo. Se han
presentado los modelos cinematicos y dinamicos
utilizados y un algoritmo de control de linealizacion por
realimentacion en base a estos modelos no lineales. Se
prueba que el algoritmo propuesto conduce a un sistema
de control estable con convergencia asintotica de los
errores de control a cero. El error de control se deIine
sobre el Ilujo medido a partir de las imagenes (control
visual directo), probandose que este objetivo se
0 1 2 3 4 5 6 7
-0.1
-0.08
-0.06
-0.04
-0.02
0
flujo ptico
t [s]
0 1 2 3 4 5 6 7
-0.02
0
0.02
0.04
0.06
t [s]
izquierda
derecha
Eigura 8
.
0 1 2 3 4 5 6 7
0
2
4
6
8
velocidad
t [s]
m/s
0 1 2 3 4 5 6 7
-0.02
0
0.02
0.04
0.06
t [s]
rad/s
Eigura 9.
corresponde univocamente con el de navegacion en el
centro del pasillo. Para reIerencias de Ilujo derecho e
izquierdo diIerentes, puede lograrse la navegacion hacia
un costado del pasillo. Los resultados de simulacion
muestran el buen comportamiento del sistema de control
y su capacidad para hacer girar al robot en las esquinas
de los pasillos. Se han realizado experimentos
preliminares en laboratorio para veriIicar la Iactibilidad
practica de implementacion del algoritmo utilizando una
placa especializada para el procesamiento de imagenes.
El trabajo actual se orienta en completar estos
experimentos de implantacion del algoritmo en sistemas
de laboratorio.
Referencias
Gibson, J.J. (1950). The percepcion oI the visual world.
Riverside Press, Cambridge, England.
Gibson, J.J. (1966). The senses considered as perceptual
systems. Houghton-MiIIlin, Boston.
Horn B., B. Schunk (1980). Determining optical Ilow.
A.I. Memo No. 572, MIT.
Barron J.L., D.J. Eleet, S.S. Beauchemin (1994).
PerIormance oI optical Ilow techniques. IJVC 12:1,
pp.43-77.
Santos- Victor J., G. Sandini, E. Curotto, S. Garibaldi
(1995). Divergent stereo in autonomous navigarion:
Irom bees to robots. Intl. Journal oI Computer
Vision, 14, pp159-177.
Erizera Vassallo R., H.J. Schneebeli, J. Santos Victor.
Visual navigation: combining visual servoing and
appearance based methods. SIRS98: 6
th
. Intl. Symp.
On Intelligent Robotic Systems. Edimburg, Scotland,
July 1998.
Dev Anuj, Ben Krose, Eranz Groen. Navigation oI a
mobile robot on the temporal development oI the
optic Ilow. Proc. oI the IEEE/RSJ/GI Int. ConI. on
Intelligent Robots and Systems, IROS97, Grenoble,
Erancia, Sept. 1997.
Santos Victor J., G. Sandini, E. Curotto, S. Garibaldi.
Divergent stereo in autonomous navigation: Erom
bees to robots. Intl. Journal oI Computer Vision, 14,
159-177, 1995.
Erizera Vassallo R., H.J. Schneebeli, J. Santos-Victor
(1998). Visual navigation: combining visual servoing
and appearance based methods. SIRS98, 6
th
. Int.
Symp. On Intelligent Robotic Systems. Edimburg,
Scotland, July 1998.
Dev A., B. Krose, E. Groen (1997). Navigation oI a
mobile robot on the temporal development oI the
optic Ilow. Proc. IEEE/RSJ/GI Int. ConI. on
Intelligent Robots and Systems IROS97, Grenoble,
Sept. 1997, pp.558-563.
You might also like
- Síntesis Del PrincipitoDocument2 pagesSíntesis Del PrincipitoLupitaSalaya100% (1)
- Antón ChejóvDocument4 pagesAntón Chejóvmarta100% (1)
- La Creencia Islámica 4Document7 pagesLa Creencia Islámica 4Jessica RivaNo ratings yet
- CA936313AD3016D7B06F6B3A385C40C7Document8 pagesCA936313AD3016D7B06F6B3A385C40C7estebanN89No ratings yet
- Jurisprudencia 2018 - Manzanares, Vilma Margarita C Pcia Santa FeDocument2 pagesJurisprudencia 2018 - Manzanares, Vilma Margarita C Pcia Santa FeEstudio Alvarezg AsociadosNo ratings yet
- Elsevier Metabolismo de GlucosidoDocument41 pagesElsevier Metabolismo de GlucosidoDIANA FERNANDA PEREZ ESPINOZANo ratings yet
- Análisis de Pelicula Denisse Alanez 2Document3 pagesAnálisis de Pelicula Denisse Alanez 2Denisse AlanezNo ratings yet
- Matemática para El Ingreso A La Educación Superior en Los Cursos para Trabajadores - Riquenes RodríguezDocument141 pagesMatemática para El Ingreso A La Educación Superior en Los Cursos para Trabajadores - Riquenes RodríguezdriveroyNo ratings yet
- Recurso de Apelacion de Auto - Yolanda Ernestina Calderon de Medina, y Moises Medina PuenteDocument6 pagesRecurso de Apelacion de Auto - Yolanda Ernestina Calderon de Medina, y Moises Medina PuenteABOGADO PERCY CORONADO C.No ratings yet
- Quimica Tarea 1Document6 pagesQuimica Tarea 1David AvendañoNo ratings yet
- Taller de Tesis 1 (Introductoria 1)Document11 pagesTaller de Tesis 1 (Introductoria 1)MARBLEMENDOZANo ratings yet
- Modulo de Competencias de La Lengua Castellana 3 SemDocument71 pagesModulo de Competencias de La Lengua Castellana 3 SemROBERTNo ratings yet
- Aprovechamiento Residuos ForestalesDocument10 pagesAprovechamiento Residuos ForestalesMaría José Miranda ÁlvarezNo ratings yet
- Actividades Las Medias de Los FlamencosDocument5 pagesActividades Las Medias de Los FlamencosalejandraNo ratings yet
- Mecanismos de Desplazamiento de Fluidos en El YacimientoDocument7 pagesMecanismos de Desplazamiento de Fluidos en El YacimientoJovi CooperNo ratings yet
- Construcción Social Del MiedoDocument10 pagesConstrucción Social Del MiedoJuan Hernandez LopezNo ratings yet
- Requisitos para Cargos PublicosDocument3 pagesRequisitos para Cargos PublicosShenny AldanaNo ratings yet
- Estudio de Los Casos Barbie y KenDocument4 pagesEstudio de Los Casos Barbie y KenCompu Servicios Aguilera Trabajos UniversitariosNo ratings yet
- 00 OracionesDocument13 pages00 OracionesAlvaro SolisNo ratings yet
- 15.las Gafas de La VerdadDocument3 pages15.las Gafas de La VerdadbernyyNo ratings yet
- Trabajo Monografico Ética - Grupo 3Document11 pagesTrabajo Monografico Ética - Grupo 3Kait Beckham Heras HerreraNo ratings yet
- 11 21 Iyc ByneonDocument100 pages11 21 Iyc ByneonIl Barbone100% (1)
- Las Sabias Frases Que Nos Hacen Más TontosDocument45 pagesLas Sabias Frases Que Nos Hacen Más TontosMauricio Murillo ArayaNo ratings yet
- Programa Historia Americana 3. 2021Document9 pagesPrograma Historia Americana 3. 2021Gustavo MuñozNo ratings yet
- Castillo Yenuel LaLectura y Sus TiposDocument3 pagesCastillo Yenuel LaLectura y Sus TiposYenuel CastilloNo ratings yet
- BariDocument3 pagesBarilaura gutierrezNo ratings yet
- Prueba Lectura y Contenidos 2ºDocument13 pagesPrueba Lectura y Contenidos 2ºProfesoramarlen3punto0100% (1)
- ParatextoDocument23 pagesParatextoErwin Albert Herrera QuispeNo ratings yet
- TELEOSOPHIA. "Fines de La Sabiduría Hacia La Búsqueda Del Ser Conciente" Autor: Aleph DáathDocument122 pagesTELEOSOPHIA. "Fines de La Sabiduría Hacia La Búsqueda Del Ser Conciente" Autor: Aleph DáathTeleosophia Iniciática100% (1)
- Informe de Suelos OficialDocument23 pagesInforme de Suelos OficialMeyer Jose Rufasto VasquezNo ratings yet