You might also like
- Agilent ADNS-2051 Optical Mouse Sensor: Data SheetDocument40 pagesAgilent ADNS-2051 Optical Mouse Sensor: Data Sheetthongle100% (1)
- Mouse SensorDocument27 pagesMouse SensorHimanshu Choudhary100% (1)
- ADNS 2030 AvagoDocument34 pagesADNS 2030 AvagoHemanth BollamreddiNo ratings yet
- Avago ADNS-9800 DatasheetDocument40 pagesAvago ADNS-9800 DatasheetRobert PetersonNo ratings yet
- Optical Mouse SensorDocument27 pagesOptical Mouse SensorDDGNJRC100% (1)
- Adns 3050Document30 pagesAdns 3050Sohnny JinsNo ratings yet
- Agilent ADNS-3080 High-Performance Optical Mouse Sensor: Data SheetDocument41 pagesAgilent ADNS-3080 High-Performance Optical Mouse Sensor: Data Sheetjakalae5263No ratings yet
- Design Guide: ADNK-5003Document8 pagesDesign Guide: ADNK-5003Byron ZúñigaNo ratings yet
- 6-Line EMI Filter&ESD For SD Card UQFN16Document12 pages6-Line EMI Filter&ESD For SD Card UQFN16conti51No ratings yet
- QRD1114Document4 pagesQRD1114GeovasCasteloNo ratings yet
- Esp32-Solo-1 Datasheet enDocument26 pagesEsp32-Solo-1 Datasheet enSütő László BalázsNo ratings yet
- Solid-State Optical Mouse Sensor With PS/2 and Quadrature OutputsDocument11 pagesSolid-State Optical Mouse Sensor With PS/2 and Quadrature Outputsloco colinaNo ratings yet
- Service Manual: Model #: SV320XVT/370XVT - LGDDocument32 pagesService Manual: Model #: SV320XVT/370XVT - LGDDustin LaRocheNo ratings yet
- QRD 1114Document4 pagesQRD 1114Beca StarkNo ratings yet
- Nikon D200 Digital SLR Camera Specs and Repair GuideDocument109 pagesNikon D200 Digital SLR Camera Specs and Repair Guideianjpr50% (2)
- KVH E-Core 1000Document21 pagesKVH E-Core 1000derbagNo ratings yet
- Data Sheet: AFBR-5803AQZ and AFBR-5803ATQZDocument16 pagesData Sheet: AFBR-5803AQZ and AFBR-5803ATQZjonwangNo ratings yet
- Optical Reflective Sensors: HEDS-1200 High Resolution Infrared Sensor HEDS-1300 Precision Resolution SensorDocument8 pagesOptical Reflective Sensors: HEDS-1200 High Resolution Infrared Sensor HEDS-1300 Precision Resolution Sensorh_mengesNo ratings yet
- Erc12864fs 1 ManualDocument10 pagesErc12864fs 1 ManualHélderNo ratings yet
- VCNL4000: Vishay SemiconductorsDocument14 pagesVCNL4000: Vishay SemiconductorsDeepak ChandrasekarNo ratings yet
- 42” PLASMA PDP MONITOR CHASSIS SERVICE MANUALDocument62 pages42” PLASMA PDP MONITOR CHASSIS SERVICE MANUALVic DiNo ratings yet
- DatasheedDocument8 pagesDatasheedTarlei AlmeidaNo ratings yet
- Datasheet AEAT-6600Document11 pagesDatasheet AEAT-6600ArminNo ratings yet
- Manual VelodineDocument43 pagesManual VelodineAlvin Badoo AlvinOriginal BadooNo ratings yet
- Agilent ADNB-6001 and ADNB-6002 Laser Mouse Bundles: DatasheetDocument52 pagesAgilent ADNB-6001 and ADNB-6002 Laser Mouse Bundles: DatasheetKolja KallNo ratings yet
- High Resolution Optical Sensor Technical Data SheetDocument7 pagesHigh Resolution Optical Sensor Technical Data SheetXavi Sintas MolesNo ratings yet
- Human Turntable MakingDocument27 pagesHuman Turntable MakingPrasanna TNo ratings yet
- Esp32-Solo-1 Datasheet enDocument24 pagesEsp32-Solo-1 Datasheet enRAJ VIGNESHNo ratings yet
- Sony Dsr-pd175 - pd177 - pd198 Service ManualDocument249 pagesSony Dsr-pd175 - pd177 - pd198 Service ManualPrime Lens100% (4)
- Compact Disc Stereo Cassette Service ManualDocument0 pagesCompact Disc Stereo Cassette Service ManualparascoliNo ratings yet
- Proyector Sony VPL-CX21 PDFDocument4 pagesProyector Sony VPL-CX21 PDFAle Var CamNo ratings yet
- Esp32 Solo 1 Datasheet En-1384705Document27 pagesEsp32 Solo 1 Datasheet En-1384705Inventor TestNo ratings yet
- Dem16216syh LyDocument22 pagesDem16216syh LyjoachinNo ratings yet
- Analog Solutions PDFDocument295 pagesAnalog Solutions PDFEPCOMUSANo ratings yet
- Daewoo Dla32c7lmbd PDFDocument56 pagesDaewoo Dla32c7lmbd PDFJesus PerezNo ratings yet
- Datasheet Optical Mouse SensorDocument14 pagesDatasheet Optical Mouse Sensorbeppes66No ratings yet
- CPT TFT-LCD Technical SpecificationDocument28 pagesCPT TFT-LCD Technical SpecificationabdessNo ratings yet
- SCD 2080R DatasheetDocument2 pagesSCD 2080R DatasheetNur Mohamad Abadi RidzuanNo ratings yet
- 63-Hdl64es2g Hdl-64e s2 CD Hdl-64e s2 Users Manual Low ResDocument43 pages63-Hdl64es2g Hdl-64e s2 CD Hdl-64e s2 Users Manual Low ResSajeesh ThambirajNo ratings yet
- Acer S190WL S196WL 2chip 20120602 A00 Service ManualDocument66 pagesAcer S190WL S196WL 2chip 20120602 A00 Service ManualDoru RazvanNo ratings yet
- Sony Dsc-h10 Service Manual LeDocument69 pagesSony Dsc-h10 Service Manual LeJonathan Pardo JtechSolutionsNo ratings yet
- Absolute EncoderDocument7 pagesAbsolute EncoderMark TorresNo ratings yet
- Vizio Vw32l HDTV Service ManualDocument43 pagesVizio Vw32l HDTV Service ManualB.r. ArturoNo ratings yet
- Monitor Samsung 5807Document57 pagesMonitor Samsung 5807pepitito22No ratings yet
- AEAT 9000 1GSH0 Full Option Ultra Precision 17 Bit Absolute Single Turn Encoder PDFDocument8 pagesAEAT 9000 1GSH0 Full Option Ultra Precision 17 Bit Absolute Single Turn Encoder PDFNguyen Quang VinhNo ratings yet
- LC MeterDocument10 pagesLC MeterYenidir TeknoNo ratings yet
- Philips Chassis.q528.2e LaDocument135 pagesPhilips Chassis.q528.2e Lavideoson0% (1)
- PhilipsDocument135 pagesPhilipsBebby ManNo ratings yet
- Dpc-7200n Daewoo DVD Portable PlayerDocument42 pagesDpc-7200n Daewoo DVD Portable PlayermaurorzhzNo ratings yet
- 2) Om30psDocument8 pages2) Om30psshinjikenny100% (1)
- Sony CDPX777ES CD SMDocument41 pagesSony CDPX777ES CD SMczeslawastachowialpNo ratings yet
- Chassis Hudson PhillipsDocument95 pagesChassis Hudson Phillipscarlos ortizNo ratings yet
- Virtual Boy Architecture: Architecture of Consoles: A Practical Analysis, #17From EverandVirtual Boy Architecture: Architecture of Consoles: A Practical Analysis, #17No ratings yet
- Exploring Arduino: Tools and Techniques for Engineering WizardryFrom EverandExploring Arduino: Tools and Techniques for Engineering WizardryRating: 4.5 out of 5 stars4.5/5 (5)
- CCTV Surveillance: Video Practices and TechnologyFrom EverandCCTV Surveillance: Video Practices and TechnologyRating: 4 out of 5 stars4/5 (1)
- Beginning Digital Electronics through ProjectsFrom EverandBeginning Digital Electronics through ProjectsRating: 5 out of 5 stars5/5 (1)
- Workshop Practice Series - BooksDocument8 pagesWorkshop Practice Series - Bookscatapix100% (5)
- Low Cost Fire Alarm CircuitDocument2 pagesLow Cost Fire Alarm CircuitmohitNo ratings yet
- 20 - Metalwork and Machining Hints and TipsDocument49 pages20 - Metalwork and Machining Hints and Tipsbatazivo0% (1)
- Digital Tachometer Using Arduino Plus Speed Control.Document3 pagesDigital Tachometer Using Arduino Plus Speed Control.elvergonzalez1No ratings yet
- Lsi/Csi: Digital Lock For Automotive IgnitionsDocument4 pagesLsi/Csi: Digital Lock For Automotive Ignitionselvergonzalez1No ratings yet
- Thermostat Using LM56Document2 pagesThermostat Using LM56elvergonzalez1No ratings yet
- Parts List For A Miniature Low RateDocument1 pageParts List For A Miniature Low Rateelvergonzalez1No ratings yet
- KW Low SchemDocument1 pageKW Low Schemelvergonzalez1No ratings yet
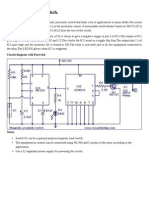
- Magnetic Proximity Switch.Document1 pageMagnetic Proximity Switch.elvergonzalez1No ratings yet
- Electronic Combination Lock CircuitDocument2 pagesElectronic Combination Lock Circuitelvergonzalez1No ratings yet
- Ignition For Old CarsDocument2 pagesIgnition For Old Carselvergonzalez1No ratings yet
- KW High SchemDocument1 pageKW High Schemelvergonzalez1No ratings yet
- Digital Thermometer Circuit.Document2 pagesDigital Thermometer Circuit.elvergonzalez1100% (1)
- Digital Code Lock Using Arduino With LCD Display and User Defined PasswordDocument7 pagesDigital Code Lock Using Arduino With LCD Display and User Defined Passwordelvergonzalez1100% (1)
- Air Flow Detector Circuit.Document1 pageAir Flow Detector Circuit.elvergonzalez1No ratings yet
- Magnetic Proximity Switch.Document1 pageMagnetic Proximity Switch.elvergonzalez1No ratings yet
- RF Based Wireless Remote Control SystemDocument4 pagesRF Based Wireless Remote Control Systemelvergonzalez1No ratings yet
- Everything That Moves ALARM CircuitDocument1 pageEverything That Moves ALARM Circuitelvergonzalez1No ratings yet
- Design and Construction of A Remote Controlled Fan RegulatorDocument8 pagesDesign and Construction of A Remote Controlled Fan RegulatorDeepak ParasharNo ratings yet
- Digital Tachometer Using Arduino Plus Speed Control.Document3 pagesDigital Tachometer Using Arduino Plus Speed Control.elvergonzalez1No ratings yet
- Erii4 Ic History Op AmpsDocument10 pagesErii4 Ic History Op Ampselvergonzalez1No ratings yet
- Electronic Siren CircuitDocument2 pagesElectronic Siren Circuitelvergonzalez1No ratings yet
- Small Wonders - Registered Drop in Auto SearsDocument5 pagesSmall Wonders - Registered Drop in Auto SearsMarcos Morsch100% (8)
- Electronic Combination Lock CircuitDocument2 pagesElectronic Combination Lock Circuitelvergonzalez1No ratings yet
- Air Flow Detector Circuit.Document1 pageAir Flow Detector Circuit.elvergonzalez1No ratings yet
- Colt AR-15 Rifle Lightning LinkDocument5 pagesColt AR-15 Rifle Lightning Linkelvergonzalez1100% (1)
- Mod Firearm Beretta - US Patent 5596162Document9 pagesMod Firearm Beretta - US Patent 5596162luanfunari100% (1)
- Stinger 4 ECU manualDocument59 pagesStinger 4 ECU manualelvergonzalez1No ratings yet
- Colt AR-15 Rifle Lightning LinkDocument5 pagesColt AR-15 Rifle Lightning Linkelvergonzalez1100% (1)
- HK 91, SR9,93,94, SP89Document3 pagesHK 91, SR9,93,94, SP89elvergonzalez1No ratings yet
- Activity No. 1 Generated Voltage in A Coil ObjectivesDocument4 pagesActivity No. 1 Generated Voltage in A Coil ObjectivesJohn Paul BaquiranNo ratings yet
- LF Solar Panels Datasheet - July 2022 - Preview FileDocument9 pagesLF Solar Panels Datasheet - July 2022 - Preview FileMayur HiwarkarNo ratings yet
- 20th International Physics Olympiad ProblemsDocument190 pages20th International Physics Olympiad Problemsais3000No ratings yet
- DPS 2011 2 6 127 131Document5 pagesDPS 2011 2 6 127 131anuradha.d.bhat9860No ratings yet
- Some Reduction and Transformation Formulas For The Appell Hypergeometric Function F2Document16 pagesSome Reduction and Transformation Formulas For The Appell Hypergeometric Function F2peppas4643No ratings yet
- Allison Transmision Om3753en, 3000-4000 SP Series Operators ManualDocument111 pagesAllison Transmision Om3753en, 3000-4000 SP Series Operators ManualHernan Reyes Carbonell100% (1)
- Oil Guns and Gas Firing Equipment PDFDocument24 pagesOil Guns and Gas Firing Equipment PDFPravin KumarNo ratings yet
- Connected Array AntennasDocument234 pagesConnected Array Antennasmarchelo_cheloNo ratings yet
- The Kinetic Theory of Gases: Dr. Tariq Al-AbdullahDocument33 pagesThe Kinetic Theory of Gases: Dr. Tariq Al-AbdullahSlayer 45073No ratings yet
- Syllabus B Civil AMIEDocument23 pagesSyllabus B Civil AMIEPankaj ChetiaNo ratings yet
- ASTMD2444 FixedImpactDocument8 pagesASTMD2444 FixedImpactGerardo Lopez GochiNo ratings yet
- Hardness Test What Is Hardness?Document54 pagesHardness Test What Is Hardness?Parvatham RamalingamNo ratings yet
- Fit A Gaussian Process Regression (GPR) Model - MATLAB Fitrgp - MathWorks España PDFDocument10 pagesFit A Gaussian Process Regression (GPR) Model - MATLAB Fitrgp - MathWorks España PDFingjojedaNo ratings yet
- Microstructure Analysis Metallography Mechanical TestingDocument6 pagesMicrostructure Analysis Metallography Mechanical TestingMosso MartinNo ratings yet
- NeQuick Ionospheric Model SoftwareDocument29 pagesNeQuick Ionospheric Model SoftwarePaul DupontNo ratings yet
- Splice Connection DesignDocument5 pagesSplice Connection DesignBunkun15No ratings yet
- Introduction to Mobile Robot Motion PlanningDocument151 pagesIntroduction to Mobile Robot Motion Planningvarun_bluejayNo ratings yet
- Piezoelectric MaterialsDocument15 pagesPiezoelectric Materialsmahmoud ahmed0% (1)
- Pro Ducorit UkDocument2 pagesPro Ducorit Uksreeraj1986No ratings yet
- Engineering Calculation Sheet Consulting EngineersDocument27 pagesEngineering Calculation Sheet Consulting Engineersazhar ahmadNo ratings yet
- ExamplesCh18 AccessibleDocument34 pagesExamplesCh18 AccessibleSyed YousufuddinNo ratings yet
- Excel FormulaDocument207 pagesExcel FormulaRajesh KanalaNo ratings yet
- Visual Function ExperimentDocument3 pagesVisual Function Experimentim. EliasNo ratings yet
- Siemens Rayos X Multix Swing Datasheet 1 PDFDocument8 pagesSiemens Rayos X Multix Swing Datasheet 1 PDFAlejandro FaveroNo ratings yet
- Pumps and Compressors: Essential Guide to Energy Transfer DevicesDocument48 pagesPumps and Compressors: Essential Guide to Energy Transfer DevicesIndiran SelvanNo ratings yet
- Electronic Controls in KnittingDocument20 pagesElectronic Controls in KnittingProfessorTextechNo ratings yet
- 2019 Cre Ii L24-26Document32 pages2019 Cre Ii L24-26Aman PrasadNo ratings yet
- Wind Turbine Design Standards-DNV PDFDocument28 pagesWind Turbine Design Standards-DNV PDFarafard100% (1)
- Process Control and HazopDocument12 pagesProcess Control and HazopCosmin FloreaNo ratings yet
- Autobiography of Swami JnananandaDocument45 pagesAutobiography of Swami Jnananandalifesoneric100% (4)