You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Submittal Data: VRF Outdoor Unit 38VMA216HDS5-1 - Heat PumpDocument3 pagesSubmittal Data: VRF Outdoor Unit 38VMA216HDS5-1 - Heat PumpHernandoLopezUNo ratings yet
- Bucher LRV Hydraulic ValveDocument90 pagesBucher LRV Hydraulic Valvedean_lockey0% (1)
- Atasheet en 201508 T58I-E-02 Rev3 2Document17 pagesAtasheet en 201508 T58I-E-02 Rev3 2deri mardiNo ratings yet
- Aleph J ManualDocument6 pagesAleph J ManualasenmtNo ratings yet
- Lecture Notes - Power Electronics PDFDocument197 pagesLecture Notes - Power Electronics PDFM.T. KadamNo ratings yet
- Load Frequency Control of Hydro and Nuclear Power System by PI & GA ControllerDocument6 pagesLoad Frequency Control of Hydro and Nuclear Power System by PI & GA Controllerijsret100% (1)
- 9907X0053 - 1 Operating InstructionsDocument7 pages9907X0053 - 1 Operating InstructionsKalindaMadusankaDasanayakaNo ratings yet
- Manual de Ususario UPS Uninterruptible Power SupplyDocument19 pagesManual de Ususario UPS Uninterruptible Power SupplyJoelNo ratings yet
- 02 Pca-N3060-LcdDocument2 pages02 Pca-N3060-LcdGUDANG BERITA KITANo ratings yet
- Checking Data, I-CANDocument3 pagesChecking Data, I-CANWaldek KozlowskiNo ratings yet
- 3bse021356r4101 Cio S200ioDocument358 pages3bse021356r4101 Cio S200iolgrome73No ratings yet
- Air Cooled Type Chiller: Operation ManualDocument28 pagesAir Cooled Type Chiller: Operation ManualmodussarNo ratings yet
- ML Maximum Power Point Tracking (MPPT) Series Ml4860: User ManualDocument13 pagesML Maximum Power Point Tracking (MPPT) Series Ml4860: User ManualReymark EmbateNo ratings yet
- Chowdhury 2017Document11 pagesChowdhury 2017bhatttanmayhNo ratings yet
- Typical NotesDocument13 pagesTypical NotesDevang TripathiNo ratings yet
- Ceraphant T PTC31, PTP31, PTP35: Technical InformationDocument24 pagesCeraphant T PTC31, PTP31, PTP35: Technical InformationRenato Jose Genari LiraNo ratings yet
- Rotor Earth Fault Protection of GeneratorDocument31 pagesRotor Earth Fault Protection of GeneratorRoger IlachoqueNo ratings yet
- Simple Agelesss Methods For Field Testing Power TransformersDocument13 pagesSimple Agelesss Methods For Field Testing Power Transformersraza239No ratings yet
- Course Assignment Submission Date: 30.09.2021: S.No Full Name ID - No QuestionsDocument2 pagesCourse Assignment Submission Date: 30.09.2021: S.No Full Name ID - No QuestionsEbisa RefisaNo ratings yet
- WiringDocument9 pagesWiringnithyasreeNo ratings yet
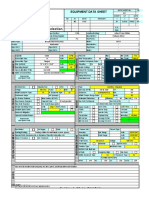
- Example Pump Selection: Equipment Data SheetDocument4 pagesExample Pump Selection: Equipment Data SheetMohamed Yassine LahianiNo ratings yet
- Military RadarDocument20 pagesMilitary RadarKartik MeNo ratings yet
- Recloser-Fuse Coordination of Radial Distribution Systems in Presence of DG: Analysis, Simulation Studies, & An Adaptive Relaying SchemeDocument31 pagesRecloser-Fuse Coordination of Radial Distribution Systems in Presence of DG: Analysis, Simulation Studies, & An Adaptive Relaying SchemeAndres L MencoNo ratings yet
- Business Class M2 Workshop Manual-4Document295 pagesBusiness Class M2 Workshop Manual-4Dinator CortésNo ratings yet
- Evga X79 Motherboard: User GuideDocument35 pagesEvga X79 Motherboard: User GuideronuildoNo ratings yet
- Cancel Fals Distr AlertDocument1 pageCancel Fals Distr AlertIGORNo ratings yet
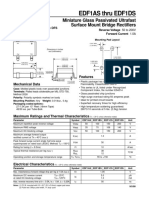
- EDF1AS Thru EDF1DS: Miniature Glass Passivated Ultrafast Surface Mount Bridge RectifiersDocument2 pagesEDF1AS Thru EDF1DS: Miniature Glass Passivated Ultrafast Surface Mount Bridge RectifiersCarlosNo ratings yet
- Ecs 648-M7 - Rev 1.2a PDFDocument36 pagesEcs 648-M7 - Rev 1.2a PDFCarlos Henrique RibasNo ratings yet
- Micro Component System: InstructionsDocument0 pagesMicro Component System: InstructionsHristuNo ratings yet
- Engineering ManualDocument265 pagesEngineering ManualdavayhayNo ratings yet