You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- SkyAir R410A Inv Cooling EDVN281407 PDFDocument532 pagesSkyAir R410A Inv Cooling EDVN281407 PDFThinh Nguyen100% (2)
- 1 - Introduction To Microelectronics LMSverDocument74 pages1 - Introduction To Microelectronics LMSverroxy8marie8chanNo ratings yet
- 4.catalogue Mog-Cat-13-ExDocument11 pages4.catalogue Mog-Cat-13-ExNicolas GallegosNo ratings yet
- Interference Cancellation System Design Using GNU Radio: by Jan Paolo AcostaDocument24 pagesInterference Cancellation System Design Using GNU Radio: by Jan Paolo AcostaartovolastiNo ratings yet
- Lab Report 1 F2023, F2002 .Document13 pagesLab Report 1 F2023, F2002 .nazren shahNo ratings yet
- CV of Farha Islam MimeDocument3 pagesCV of Farha Islam MimeRajesh RoyNo ratings yet
- GV-2 Guv'nor Plus: Owners ManualDocument5 pagesGV-2 Guv'nor Plus: Owners ManualDaniel CardiaNo ratings yet
- 1 - PPT For MCC For Aets 2017Document50 pages1 - PPT For MCC For Aets 2017Harleen KaurNo ratings yet
- Homework 3: Phase and Timing Estimation Due November 22: EE 477 Introduction To Digital Communications Fall 2019Document2 pagesHomework 3: Phase and Timing Estimation Due November 22: EE 477 Introduction To Digital Communications Fall 2019kelvin mwanikiNo ratings yet
- MR 198CVS Video Processor User Manual V1.0 20140505 PDFDocument120 pagesMR 198CVS Video Processor User Manual V1.0 20140505 PDFMauricio DiazNo ratings yet
- E740163 KX3 Owner's Man Rev C5Document58 pagesE740163 KX3 Owner's Man Rev C5Stephen FergusonNo ratings yet
- Buchholz Relay in Transformers (Working Principle) - Electrical4UDocument5 pagesBuchholz Relay in Transformers (Working Principle) - Electrical4UHarsh PatelNo ratings yet
- Design and Techno-Economical Optimization For Hybrid PV-wind System Under Various Meteorological ConditionsDocument20 pagesDesign and Techno-Economical Optimization For Hybrid PV-wind System Under Various Meteorological Conditionsjun005No ratings yet
- 300Mhz To 450Mhz Low-Power, Crystal-Based +10Dbm Ask/Fsk TransmitterDocument11 pages300Mhz To 450Mhz Low-Power, Crystal-Based +10Dbm Ask/Fsk TransmitterBlagoja GjakovskiNo ratings yet
- 8 DtekDocument5 pages8 DtekAlexander WieseNo ratings yet
- Am DSBFC Systems (By Larry E. Gugle K4rfe)Document9 pagesAm DSBFC Systems (By Larry E. Gugle K4rfe)rascalangelNo ratings yet
- Hrocat 8Document7 pagesHrocat 8Sparky73No ratings yet
- Instruments NotesDocument116 pagesInstruments Notesprithvih4No ratings yet
- Auo B140XW01 V.8Document30 pagesAuo B140XW01 V.8shareatorNo ratings yet
- Guideline For Typical Appliance Ratings To Assist in Sizing of PV Solar SystemsDocument8 pagesGuideline For Typical Appliance Ratings To Assist in Sizing of PV Solar SystemspriteshjNo ratings yet
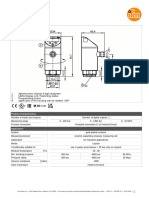
- PN7092 Pressure Sensor DisplayDocument5 pagesPN7092 Pressure Sensor DisplayEslam YehiaNo ratings yet
- Cisco Catalyst 6500 Series Switch DatasheetDocument12 pagesCisco Catalyst 6500 Series Switch DatasheetJoannaNo ratings yet
- Lecture5 Chapter2 - Positive and Negative LogicDocument11 pagesLecture5 Chapter2 - Positive and Negative LogicAyesha HussainNo ratings yet
- RPM Meter For Automobiles Circuit Diagram - Electronic Circuits DiagramDocument1 pageRPM Meter For Automobiles Circuit Diagram - Electronic Circuits DiagramSantiago Argañaraz BoniniNo ratings yet
- Total StationDocument2 pagesTotal StationrahoznawrozNo ratings yet
- JSS-296 - NCR-333 - Ton SART20 - Tron 40SDocument401 pagesJSS-296 - NCR-333 - Ton SART20 - Tron 40SBryan MilloNo ratings yet
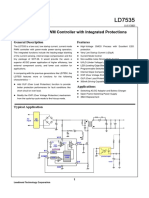
- Green-Mode PWM Controller With Integrated Protections: General Description FeaturesDocument18 pagesGreen-Mode PWM Controller With Integrated Protections: General Description FeaturesRUSLANNo ratings yet
- Impedance Measurement Instruments: 26.1. Introduction To Impedance MeasurementsDocument26 pagesImpedance Measurement Instruments: 26.1. Introduction To Impedance MeasurementsHeiner Farid Castillo AvellaNo ratings yet
- Generator Governor Frequency Response Webinar April 2015Document31 pagesGenerator Governor Frequency Response Webinar April 2015Jeans GonzalezNo ratings yet
- Data Aire Brochure Web Version v4Document4 pagesData Aire Brochure Web Version v4dnps2011No ratings yet