You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
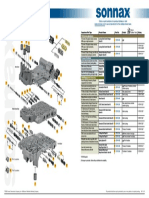
- Aisin AW TF-81SC: Click On Part Numbers For Product Details or VisitDocument1 pageAisin AW TF-81SC: Click On Part Numbers For Product Details or Visittejonmx100% (1)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Wilmont's DroneTech Project Charter PDFDocument2 pagesWilmont's DroneTech Project Charter PDFhuda mahmoudNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Manual Tecnologia Civic 2012Document6 pagesManual Tecnologia Civic 2012Mauricio Jesús Buzani RayonNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Vessel Technical BrochureDocument26 pagesVessel Technical BrochureMonica IorgulescuNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Iso 10245-2-2014 PDFDocument16 pagesIso 10245-2-2014 PDFalejandroNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- CMR Cloud Lab Guide CommunityDocument46 pagesCMR Cloud Lab Guide Communitykepke86No ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Chapter 3Document74 pagesChapter 3Berhane KifleNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- New CVDocument3 pagesNew CVDhiraj ShindeNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Ir4570 Series PDFDocument876 pagesIr4570 Series PDFHan SonNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- I-Smell TechnologyDocument24 pagesI-Smell Technologyhimmatkanwar100% (3)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Bab 2 - Coal Handling PlantDocument10 pagesBab 2 - Coal Handling PlantmasgrahaNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Nokia TDM Migration White Paper enDocument28 pagesNokia TDM Migration White Paper enHarshitShuklaNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- IT Assistant: Job DescriptionDocument3 pagesIT Assistant: Job DescriptionMillionn GizawNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Manual de Reparacion MCR Serie 32-33Document34 pagesManual de Reparacion MCR Serie 32-33Fernando Tapia Gibson100% (2)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- CV - Qian YihaoDocument19 pagesCV - Qian Yihaodestri_742053763No ratings yet
- 320D2L - Serie - Esg - Plano HidraulicoDocument10 pages320D2L - Serie - Esg - Plano HidraulicoJorge Calderon RojasNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- HTC Corporation: Organization & ManagementDocument5 pagesHTC Corporation: Organization & ManagementAcad DemicsNo ratings yet
- Catalog 2021Document902 pagesCatalog 2021Nada MNo ratings yet
- Rate Monotonic Scheduling: Group - 12Document19 pagesRate Monotonic Scheduling: Group - 12Brajmohan kr SinghNo ratings yet
- A Brief Introduction To UnixDocument13 pagesA Brief Introduction To UnixLeyang LiuNo ratings yet
- Pamantasan NG Lungsod NG MuntinlupaDocument6 pagesPamantasan NG Lungsod NG MuntinlupaLuis AbawagNo ratings yet
- Zed-F9K: High Precision Dead Reckoning With Integrated IMU SensorsDocument2 pagesZed-F9K: High Precision Dead Reckoning With Integrated IMU SensorsStevan ZupunskiNo ratings yet
- Handeling Telephone CallsDocument11 pagesHandeling Telephone CallsMuzamil YousafNo ratings yet
- 8 Latest Kitchen Chimney Brands in India 2020Document4 pages8 Latest Kitchen Chimney Brands in India 2020Sulagna ChowdhuryNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Guide To Computer Forensics InvestigationDocument65 pagesGuide To Computer Forensics InvestigationAnthony WilsonNo ratings yet
- Traffic Light Detection and Recognition For Self Driving Cars Using Deep Learning SurveyDocument4 pagesTraffic Light Detection and Recognition For Self Driving Cars Using Deep Learning SurveyEditor IJTSRDNo ratings yet
- DS01071 XNX Universal Transmitter FLR 8-3-11Document4 pagesDS01071 XNX Universal Transmitter FLR 8-3-11itskittylimNo ratings yet
- Cursor (User Interface)Document6 pagesCursor (User Interface)John Vincent BaylonNo ratings yet
- Product Thinking vs. Project ThinkingDocument8 pagesProduct Thinking vs. Project ThinkingUjwal TickooNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Level 50 - How Can CSP Partners Build A Business With AzureDocument56 pagesLevel 50 - How Can CSP Partners Build A Business With Azureaki koshaNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)