You might also like
- Desenvolvimento de Circuitos EletroeletrônicosDocument2 pagesDesenvolvimento de Circuitos EletroeletrônicosLuciano Ferrari PoloNo ratings yet
- Apostila - Programando em MATLABDocument102 pagesApostila - Programando em MATLABIdalino Soares Dos SantosNo ratings yet
- Manual GEM-P1632 ProgramacaoDocument46 pagesManual GEM-P1632 ProgramacaoLuciano Ferrari PoloNo ratings yet
- Semicondutores: conceitos básicos e tipos N e PDocument9 pagesSemicondutores: conceitos básicos e tipos N e PJosé CostaNo ratings yet
- Apostila - Programando em MATLABDocument102 pagesApostila - Programando em MATLABIdalino Soares Dos SantosNo ratings yet
- Artigo Febrace 642Document2 pagesArtigo Febrace 642Luciano Ferrari PoloNo ratings yet
- Apostila de Controle Linear IDocument240 pagesApostila de Controle Linear IWeslin SavarisNo ratings yet
- Apostila - Programando em MATLABDocument102 pagesApostila - Programando em MATLABIdalino Soares Dos SantosNo ratings yet
- Diagrama BlocoDocument11 pagesDiagrama BlocoSergioVigaNo ratings yet
- Ficha de Exercícios N.º1...Document5 pagesFicha de Exercícios N.º1...Denis Rogério da Silva0% (1)
- Apostila - Programando em MATLABDocument102 pagesApostila - Programando em MATLABIdalino Soares Dos SantosNo ratings yet
- Banner Damp #219Document1 pageBanner Damp #219Luciano Ferrari PoloNo ratings yet
- Apostila ArduinoDocument26 pagesApostila ArduinoPaulo Marcelo Pontes100% (9)
- 54 Polarizacao Por Divisor de TensaoDocument21 pages54 Polarizacao Por Divisor de TensaoLuciano Ferrari Polo0% (1)
- Ficha de Exercícios N.º1...Document5 pagesFicha de Exercícios N.º1...Denis Rogério da Silva0% (1)
- CELaula 5Document30 pagesCELaula 5Wagner MachadoNo ratings yet
- Sensores ApresentacaoDocument77 pagesSensores ApresentacaoLuciano Ferrari PoloNo ratings yet
- Ficha de Exercícios N.º1...Document5 pagesFicha de Exercícios N.º1...Denis Rogério da Silva0% (1)
- Ficha de Exercícios N.º1...Document5 pagesFicha de Exercícios N.º1...Denis Rogério da Silva0% (1)
- Escoamento Viscoso e CompressívelDocument32 pagesEscoamento Viscoso e CompressívelLuciano Ferrari PoloNo ratings yet
- Desafios Tecnicos - Empresa de Montagem EletronicaDocument91 pagesDesafios Tecnicos - Empresa de Montagem EletronicaejmelchiorsNo ratings yet
- Weg - Motores de Indução Alimentados Por Inversor de FrequenciaDocument36 pagesWeg - Motores de Indução Alimentados Por Inversor de FrequenciaVictor Rafael BarrosNo ratings yet
- Pilha Documentos PDFDocument1 pagePilha Documentos PDFJord PrimeNo ratings yet
- CAI1 Avaliação I 2osem 2013 Prova 1 RecuperaçãoDocument2 pagesCAI1 Avaliação I 2osem 2013 Prova 1 RecuperaçãoLuciano Ferrari PoloNo ratings yet
- Falar Segredos Da OratoriaDocument8 pagesFalar Segredos Da OratoriaLuciano Ferrari PoloNo ratings yet
- Roteiro Peca A Senha Jeova NissiDocument6 pagesRoteiro Peca A Senha Jeova NissiTobias Machado100% (1)
- Apostila ParalelaDocument6 pagesApostila ParalelaejmelchiorsNo ratings yet
- 6 SchmittDocument8 pages6 SchmittLuciano Ferrari PoloNo ratings yet
- Capacita - MipsDocument24 pagesCapacita - MipsVander MachadoNo ratings yet
- Exercicio de Fixação 19-05Document2 pagesExercicio de Fixação 19-05Camila GarridoNo ratings yet
- Ciência, Tecnologia e Educação - Eletiva 1Document17 pagesCiência, Tecnologia e Educação - Eletiva 1pb. Paulo HenriqueNo ratings yet
- Manual Vias RodoviariasDocument220 pagesManual Vias RodoviariasEgna Shakira UqueioNo ratings yet
- Caso clínico de paciente feminina com dispneia e tosse crônicaDocument2 pagesCaso clínico de paciente feminina com dispneia e tosse crônicaEdilane Dos Santos MoreiraNo ratings yet
- Axé Music - Conheça A Origem Do Gênero MusicalDocument3 pagesAxé Music - Conheça A Origem Do Gênero MusicalCarmen BenitezNo ratings yet
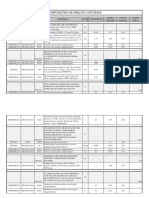
- Composicoes de PrecosDocument3 pagesComposicoes de PrecosAtanasioNo ratings yet
- Avaliação de Matemática do 6o ano do Ensino FundamentalDocument8 pagesAvaliação de Matemática do 6o ano do Ensino FundamentalalexandroNo ratings yet
- Ensino de Química Exercícios DidácticaDocument2 pagesEnsino de Química Exercícios DidácticaFaza SimbeNo ratings yet
- Plano de Disciplina Lingua Portuguesa e Literatura Brasileira PDFDocument4 pagesPlano de Disciplina Lingua Portuguesa e Literatura Brasileira PDFluizascNo ratings yet
- Relés de ImpulsoDocument2 pagesRelés de ImpulsolelasiaromNo ratings yet
- CFW700 - HIR Adendo Ao Manual Do UsuárioDocument2 pagesCFW700 - HIR Adendo Ao Manual Do Usuárioh-97225No ratings yet
- CEB NTB 2.04 - Padrao de Conexoes para Rede de Distribuicao Aerea - Rda - 1a. RevisaoDocument45 pagesCEB NTB 2.04 - Padrao de Conexoes para Rede de Distribuicao Aerea - Rda - 1a. RevisaoFelipe Junio Brandão100% (1)
- Mapa - Bedu - Atividade Integradora Comum I - Hist Da Ed FísicaDocument4 pagesMapa - Bedu - Atividade Integradora Comum I - Hist Da Ed FísicaCavalini Assessoria AcadêmicaNo ratings yet
- g19 Esm MD 5smh Aval02Document18 pagesg19 Esm MD 5smh Aval02evany AraujoNo ratings yet
- Exemplo Plano Aula Parâmetros Do SomDocument5 pagesExemplo Plano Aula Parâmetros Do SomRede RepedNo ratings yet
- Guia Rápido - OXIMETRO PULSO (ALFAMED - SENSE-10)Document18 pagesGuia Rápido - OXIMETRO PULSO (ALFAMED - SENSE-10)Thiago GagoreNo ratings yet
- Redes de computadores e protocolos TCP/IPDocument4 pagesRedes de computadores e protocolos TCP/IPolivaarte_2No ratings yet
- Ufo Na AntartidaDocument24 pagesUfo Na AntartidaGlaucco Ranniere100% (5)
- Ciclotron POP LINE 100Document1 pageCiclotron POP LINE 100Luis FerreiraNo ratings yet
- Anatomia do Crâ nio e tó raxDocument28 pagesAnatomia do Crâ nio e tó raxÉrica MartinezNo ratings yet
- LIA AgarDocument2 pagesLIA AgarLincon SovinskiNo ratings yet
- Caderno 66 Tania StolzeDocument8 pagesCaderno 66 Tania StolzeDiego RosaNo ratings yet
- Jogos e atividades sobre economia e preservação da águaDocument3 pagesJogos e atividades sobre economia e preservação da águalafabricio100% (2)
- 3º ANO Práticas Corporais de Aventura - Mountain BikeDocument25 pages3º ANO Práticas Corporais de Aventura - Mountain BikeVitor FerreiraNo ratings yet
- Trabalho 2 Análise e Simulação de Um Gyrator TransistorizadoDocument9 pagesTrabalho 2 Análise e Simulação de Um Gyrator TransistorizadoJakson AlmeidaNo ratings yet
- Contrato de apresentação musicalDocument3 pagesContrato de apresentação musicalJeff Pacce100% (2)
- Ma Costeira D MocambiqueDocument14 pagesMa Costeira D MocambiqueMulandiwakaKunene MudavanhuNo ratings yet
- Programa de Ação 2023 ProfessorDocument7 pagesPrograma de Ação 2023 ProfessorEverton Silva100% (1)
- Folhas tropicaisDocument2 pagesFolhas tropicaisomoadeifaNo ratings yet