You might also like
- Heroin SynthesisDocument6 pagesHeroin Synthesisfuckimissed100% (2)
- An Introduction to Differential Equations: Basic Concepts, ODE vs PDE, Order of a Differential Equation, Examples, and Linear Differential EquationsDocument97 pagesAn Introduction to Differential Equations: Basic Concepts, ODE vs PDE, Order of a Differential Equation, Examples, and Linear Differential EquationsAltammar13100% (1)
- Thermal Analysis of Electronic Equipment - Quick GuideDocument84 pagesThermal Analysis of Electronic Equipment - Quick Guideprashant_salima6377No ratings yet
- 2 Lyapunov Direct MethodDocument39 pages2 Lyapunov Direct Methodbluefantasy604No ratings yet
- 32 Organ PDFDocument3 pages32 Organ PDFThuvarakaNo ratings yet
- Lesson 1: How Does The Concept of Atomic Number Led To The Sysnthesis of New Elements in The LaboratoryDocument17 pagesLesson 1: How Does The Concept of Atomic Number Led To The Sysnthesis of New Elements in The LaboratoryAngelica Bag-ao100% (1)
- Physical and Thermal Treatment of Phosphate OresDocument26 pagesPhysical and Thermal Treatment of Phosphate OresManoel Carlos Cerqueira100% (2)
- Mole Concept & Stoichiometry ExplainedDocument58 pagesMole Concept & Stoichiometry ExplainedMuhammad Sahil KhanNo ratings yet
- Declectures Non Linear EquationsDocument23 pagesDeclectures Non Linear EquationsAdeniji OlusegunNo ratings yet
- Chapter 7Document11 pagesChapter 7thliopNo ratings yet
- Un Parámetro Uniforme A Medida Punto Finitos para Perturbado Singularmente Oda Linear SystemsDocument17 pagesUn Parámetro Uniforme A Medida Punto Finitos para Perturbado Singularmente Oda Linear SystemsEndless LoveNo ratings yet
- 337 Week 0910weeklyingDocument22 pages337 Week 0910weeklyingAtoy ValdezNo ratings yet
- Assignment 3Document11 pagesAssignment 3tiffanyyy00No ratings yet
- MEC 236 - Computer Applications 3Document224 pagesMEC 236 - Computer Applications 3Wafaa AimanNo ratings yet
- Primal-Dual Interior-Point Methods for Solving Linear ProgramsDocument20 pagesPrimal-Dual Interior-Point Methods for Solving Linear Programsdexxt0rNo ratings yet
- Stiff ProblemDocument19 pagesStiff Problemmoussali2No ratings yet
- CISE301 Topic9Document66 pagesCISE301 Topic9Christina Widhi HanjayaniNo ratings yet
- 32 5 Hypblc PdeDocument12 pages32 5 Hypblc PdeEbookcrazeNo ratings yet
- MATH2800 2010 S2fDocument24 pagesMATH2800 2010 S2fleopard9987No ratings yet
- Primal-Dual Interior Point Method ReportDocument8 pagesPrimal-Dual Interior Point Method ReportjayroldparcedeNo ratings yet
- Stabilizability of Two-Dimensional Navier-Stokes Equations With Help of A Boundary Feedback ControlDocument43 pagesStabilizability of Two-Dimensional Navier-Stokes Equations With Help of A Boundary Feedback ControlgetsweetNo ratings yet
- Q1 SolnDocument3 pagesQ1 SolnSteven CantrellNo ratings yet
- 32 5 Hypblc PdeDocument12 pages32 5 Hypblc PdeEbookcrazeNo ratings yet
- 8 Comprehensive Problems: 8.1 MotivationDocument6 pages8 Comprehensive Problems: 8.1 MotivationCHARLES MATHEWNo ratings yet
- Sample ProblemsDocument166 pagesSample ProblemsCeejhay PanganibanNo ratings yet
- Time Integration Methods for Solving the Heat EquationDocument10 pagesTime Integration Methods for Solving the Heat EquationVesa Räisänen100% (1)
- Student Lecture 51 and 52 Wave EqnDocument11 pagesStudent Lecture 51 and 52 Wave EqnuploadingpersonNo ratings yet
- M244: Solutions To Final Exam Review: 2 DX DTDocument15 pagesM244: Solutions To Final Exam Review: 2 DX DTheypartygirlNo ratings yet
- DSP-Lec 2Document28 pagesDSP-Lec 2ngmaherNo ratings yet
- 1-2006 Son NAFDocument9 pages1-2006 Son NAFBang Bang NgNo ratings yet
- DAEsDocument40 pagesDAEsfaizabbk1709No ratings yet
- Everyman Diff Eq'sDocument86 pagesEveryman Diff Eq'sNicholas CemenenkoffNo ratings yet
- Final Exam - Question BookletDocument8 pagesFinal Exam - Question BookletShiva CharanNo ratings yet
- 18.03 Pset 4Document36 pages18.03 Pset 4Justin CollinsNo ratings yet
- PanAm 225201241-57Document18 pagesPanAm 225201241-57sofiakaddour84No ratings yet
- Numerical Solution of Hamilton-Jacobi-Bellman Equations by An Exponentially Fitted Finite Volume MethodDocument7 pagesNumerical Solution of Hamilton-Jacobi-Bellman Equations by An Exponentially Fitted Finite Volume MethodSteve DemirelNo ratings yet
- Test 2019 1Document1 pageTest 2019 1semihkilic1997No ratings yet
- Shooting MethodDocument16 pagesShooting MethodFidia DtaNo ratings yet
- Scie Talk FemDocument25 pagesScie Talk FemDrSomnath BhattacharyaNo ratings yet
- 1 Finite-Difference Method For The 1D Heat Equation: 1.1 Domain DiscretizationDocument5 pages1 Finite-Difference Method For The 1D Heat Equation: 1.1 Domain Discretizationoverdose500No ratings yet
- Journal of Computational and Applied Mathematics: M. Reza Peyghami, S. Fathi Hafshejani, L. ShirvaniDocument12 pagesJournal of Computational and Applied Mathematics: M. Reza Peyghami, S. Fathi Hafshejani, L. ShirvaniSebastian David Ariza CollNo ratings yet
- Partial Differential EquationDocument21 pagesPartial Differential EquationJihan Nur AzizahNo ratings yet
- Mathematical Physics Sample Exam 1Document5 pagesMathematical Physics Sample Exam 1Perry EsguerraNo ratings yet
- Eso208 MidsemDocument362 pagesEso208 MidsemyhjklNo ratings yet
- Advection Eqn Is UnstableDocument9 pagesAdvection Eqn Is UnstableZakria ToorNo ratings yet
- Tutorial 5 Solution - Topic 3 - PDEs - ans-Q1-Q4Document14 pagesTutorial 5 Solution - Topic 3 - PDEs - ans-Q1-Q4Ibrahim MusaNo ratings yet
- IB Mathematical Methods I Part 4 of 4 (Cambridge)Document26 pagesIB Mathematical Methods I Part 4 of 4 (Cambridge)ucaptd3No ratings yet
- An Introduction To Averaging Method of Nonlinear VibrationDocument7 pagesAn Introduction To Averaging Method of Nonlinear VibrationAmirNo ratings yet
- Math 462: HW2 Solutions: Due On July 25, 2014Document7 pagesMath 462: HW2 Solutions: Due On July 25, 2014mjtbbhrmNo ratings yet
- D Alembert SolutionDocument22 pagesD Alembert SolutionDharmendra Kumar0% (1)
- Articulo Principio DualDocument18 pagesArticulo Principio DualDaniel NuñezNo ratings yet
- The Wave Equation On RDocument12 pagesThe Wave Equation On RElohim Ortiz CaballeroNo ratings yet
- Hidden Markov Models: Adapted FromDocument27 pagesHidden Markov Models: Adapted FromAkash Singh BadalNo ratings yet
- EE201 Assignment 1Document3 pagesEE201 Assignment 1meghana reddyNo ratings yet
- Second Order Odes: Y (X) F (X, Y)Document16 pagesSecond Order Odes: Y (X) F (X, Y)Sadek AhmedNo ratings yet
- Ce206 OdeDocument23 pagesCe206 OdeBorhan ShaikatNo ratings yet
- Math207 HW2Document2 pagesMath207 HW2PramodNo ratings yet
- May 2014 Ph.D. Preliminary Exam in ODEDocument4 pagesMay 2014 Ph.D. Preliminary Exam in ODEJiguo DaiNo ratings yet
- Lab 3 Shooting PDFDocument8 pagesLab 3 Shooting PDFSilviaNiñoNo ratings yet
- ODE Numerical Analysis RegionsDocument17 pagesODE Numerical Analysis RegionspsylancerNo ratings yet
- Stat 220 NotesDocument109 pagesStat 220 NotesqwertqteqrwrqewrqwreqwNo ratings yet
- J.Thi-Qar Sci. Vol.3 (2) Feb./2012Document15 pagesJ.Thi-Qar Sci. Vol.3 (2) Feb./2012Kanthavel ThillaiNo ratings yet
- MA 542 - Differential Equations: End-Semester Examination Department of MathematicsDocument2 pagesMA 542 - Differential Equations: End-Semester Examination Department of MathematicsNaveen GuptaNo ratings yet
- Linear Constant-Coefficient Difference Equations: M N X B K N y ADocument53 pagesLinear Constant-Coefficient Difference Equations: M N X B K N y APreeti KatiyarNo ratings yet
- Sol Mock ExamDocument10 pagesSol Mock ExamAinur LatipovNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Intro CFDDocument104 pagesIntro CFDprashant_salima6377No ratings yet
- Exercise 1 Derivation and Exact Solution of Heat Conduction EquationDocument2 pagesExercise 1 Derivation and Exact Solution of Heat Conduction Equationprashant_salima6377No ratings yet
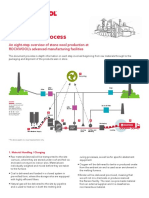
- Rockwool Stone Wool Manufacturing Production Process Fact SheetDocument2 pagesRockwool Stone Wool Manufacturing Production Process Fact Sheetprashant_salima6377No ratings yet
- Time-Dependent Boundary Conditions For Hyperbolic Systems, IIDocument23 pagesTime-Dependent Boundary Conditions For Hyperbolic Systems, IIprashant_salima6377No ratings yet
- Stanciu PDFDocument18 pagesStanciu PDFprashant_salima6377No ratings yet
- Updated Hydrogen Combustion Kinetic Model Validated Against Diverse ExperimentsDocument10 pagesUpdated Hydrogen Combustion Kinetic Model Validated Against Diverse Experimentsprashant_salima6377No ratings yet
- Thermodynamic Modeling and Analysis of Biomass Gasification For Hydrogen Production in Supercritical WaterDocument12 pagesThermodynamic Modeling and Analysis of Biomass Gasification For Hydrogen Production in Supercritical Waterprashant_salima6377No ratings yet
- Chapter HFHDocument272 pagesChapter HFHمحمد باديNo ratings yet
- Ch2 Chem FINALDocument38 pagesCh2 Chem FINALYossef AmrNo ratings yet
- Phy110 Unit V TutorialDocument18 pagesPhy110 Unit V TutorialAnsh ThakurNo ratings yet
- MATLABDocument227 pagesMATLABRohit DNo ratings yet
- Cummins Generating Set Assembly Torsional Vibration Analysis GuideDocument10 pagesCummins Generating Set Assembly Torsional Vibration Analysis GuideariwibowoNo ratings yet
- Optics QustionDocument6 pagesOptics Qustionsonu kumarNo ratings yet
- Physics 219 Practice Exam 1 Multiple Choice QuestionsDocument6 pagesPhysics 219 Practice Exam 1 Multiple Choice QuestionserjayprakashpatelNo ratings yet
- 2018 Fy13ce Mathematics Detailed SolutionDocument23 pages2018 Fy13ce Mathematics Detailed SolutionBrijaxzy Flamie TeaiNo ratings yet
- LESSON Plan in Science (TTL2)Document5 pagesLESSON Plan in Science (TTL2)Rosa LegaraNo ratings yet
- Physics: AnswersDocument23 pagesPhysics: AnswersKrishna ChoureyNo ratings yet
- Electrical and Optical PropertiesDocument26 pagesElectrical and Optical PropertiesReinhard Dapot ManurungNo ratings yet
- San Carlos University of Guatemala Faculty of Engineering School of Sciences Technical language Inga. Soraya Martinez Final project Guatemala. April 22st 2019 Goldberg MachineDocument15 pagesSan Carlos University of Guatemala Faculty of Engineering School of Sciences Technical language Inga. Soraya Martinez Final project Guatemala. April 22st 2019 Goldberg MachineMaria Renee MiraldaNo ratings yet
- Quest Review 4 Electric Force, Magnetic Fields KEYDocument16 pagesQuest Review 4 Electric Force, Magnetic Fields KEYJ PNo ratings yet
- P525/2 Chemistry Paper 2: Uganda Advanced Certificate of Education Page 1Document8 pagesP525/2 Chemistry Paper 2: Uganda Advanced Certificate of Education Page 1ArthurNo ratings yet
- Evaluation of The Performance of Computed Radiography Systems With Different Sources and Different ConfigurationsDocument12 pagesEvaluation of The Performance of Computed Radiography Systems With Different Sources and Different ConfigurationsdantegimenezNo ratings yet
- CHP 2 Electric PotentialDocument21 pagesCHP 2 Electric PotentialSyahshaiNo ratings yet
- Orthogonal Vs OrthonormalDocument2 pagesOrthogonal Vs OrthonormalShouman BaruaNo ratings yet
- 2-15-1466427029-1. Electrical - Ijeee - Coordinated Effect of Power System Stabilizer - Rampreet ManjhiDocument10 pages2-15-1466427029-1. Electrical - Ijeee - Coordinated Effect of Power System Stabilizer - Rampreet Manjhirobertovm2002No ratings yet
- Essential University Physics 3rd Edition Richard Wolfson Test BankDocument11 pagesEssential University Physics 3rd Edition Richard Wolfson Test Bankfelixedanafte5n100% (30)
- GC-MS QuizDocument10 pagesGC-MS Quizchegu BusinessNo ratings yet
- Transformations (Solution)Document12 pagesTransformations (Solution)Amman ButtNo ratings yet
- Chem-Bonding AnswersDocument31 pagesChem-Bonding AnswersSahaj SinghNo ratings yet
- L15 CRE II Heterogeneous Catalysis: Prof. K.K.Pant Department of Chemical Engineering IIT DelhiDocument15 pagesL15 CRE II Heterogeneous Catalysis: Prof. K.K.Pant Department of Chemical Engineering IIT DelhiMehul VarshneyNo ratings yet
- Docc 1981Document6 pagesDocc 1981swchenNo ratings yet
- Martensitic Transformations and Strengthening MechanismsDocument6 pagesMartensitic Transformations and Strengthening Mechanismsmans2014No ratings yet
- Physics Ssc-I: Answer Sheet No.Document6 pagesPhysics Ssc-I: Answer Sheet No.Mohsin SyedNo ratings yet