Professional Documents
Culture Documents
Manual de Detección de Fallas en Circuitos Neumáticos
Uploaded by
J Ferreyra LibanoCopyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Manual de Detección de Fallas en Circuitos Neumáticos
Uploaded by
J Ferreyra LibanoCopyright:
Available Formats
<
MICRO CAPACITACIN
> CURSO 033 | MANTENIMIENTO >
DETECCIN DE FALLAS EN CIRCUITOS NEUMTICOS
<
033
WWW.MICRO.COM.AR
MICRO
Automacin Micromecnica s.a.i.c M. Moreno 6546 B1875BLR Wilde . Buenos Aires . Argentina micro@micro.com.ar . www.micro.com.ar Tel. Ventas: 011 4227 0595 y lneas rotativas . Fax: 011 4206 6281 Conmutador: 0114206 6285 y lneas rotativas . Fax: 011 4206 0228
<
PREFACIO
<
Los estndares actuales de produccin nos obligan a ser cada vez ms eficaces y eficientes en el uso de los activos de nuestras plantas. Es por eso, que el mantenimiento de stos est cobrando mayor importancia a la hora de realizar mejoras en el proceso productivo. Por lo tanto, conocer las estrategias adecuadas para el mantenimiento de los equipos es vital. En MICRO, a travs de los cursos de capacitacin, pretendemos crear un espacio de formacin y entrenamiento en el rea de la automatizacin industrial, para estudiantes, profesores, operadores, tcnicos e ingenieros que decidan completar la propia formacin. El diseo del manual est elaborado con criterios eminentemente prcticos, para facilitar un estudio gil y actualizado de cada uno de los temas. El objetivo del curso de Deteccin de Fallas en Circuitos Neumticos, busca dar a los participantes un alto nivel de conocimientos de gestin y competencias tecnolgicas para el mantenimiento de equipos industriales. Lo que les permitir tomar decisiones adecuadas al momento de optimizar los procesos de mantenimiento y analizar las causas de las fallas frecuentes y cotidianas en equipos industriales. Esperamos haber construido una herramienta que les permita apropiarse significativamente del nuevo saber. Para contribuir al logro de los objetivos reseados, sus comentarios al final del curso sern de inestimable utilidad.
Departamento de Capacitacin capacitacion@micro.com.ar www.micro.com.ar
MICRO
<
INDICE
<
CURSO 033 Deteccin de fallas en Circuitos Neumtico
1 1.1 1.2 1.3 1.4 2 2.1 3 3.1 4 4.1 4.2 4.3 4.4 4.5 5 5.1 5.2 6 6.1 6.2 6.3 7 7. 1 7. 2 7. 3 8
Conceptos bsicos Estructura de las mquinas El concepto de mando Las seales de mando La cadena de mando Tipos de mandos Clasificacin de los mandos Representacin de las fases operativas de una mquina Formas de representacin de las fases operativas de una mquina Esquemas circuitales de mando Definicin Simbologa de los elementos Disposicin de elementos en el esquema circuital Denominacin de los elementos en el esquema Designacin de las lneas de conexionado Documentacin tcnica Lista de materiales Croquis de instalacin Interpretacin de esquemas de mando Interpretacin de esquemas circuitales de mando Temporizaciones neumticas Mandos adicionales para marcha, operacin y emergencia Deteccin de fallas Deteccin sistemtica de fallas en circuitos neumticos Procedimiento para deteccin de fallas Ejercicios de deteccin de fallas MICRO Capacitacin
Conceptos bsicos
Introduccin El mantenimiento de los equipos neumticos de produccin abarca dos aspectos bien definidos: El primero, vinculado a los conjuntos de acciones correctivas a aplicar a un equipo en condicin de falla. Las primeras son perfectamente programables y realizables en aquellos momentos en que la produccin no se vea afectada, mientras que las segundas, como es obvio, no pueden ser programadas, revisten siempre el carcter de urgentes, siendo aqu crtico el tiempo demandado en restaurar el servicio. Los pasos a seguir para solucionar la falla manifiesta de un equipo neumtico son:
1. Localizar el origen de la falla. 2. Reparar los componentes deteriorados (eventualmente sustitucin).
En accionamientos neumticos simples, la primera tarea resulta relativamente sencilla an con escasos conocimientos del tema. A medida que crece la complejidad del accionamiento, se hace imprescindible disponer de una metodologa que asegure una determinacin sistemtica, precisa y rpida de los orgenes de la falla. Esto ltimo requiere el cabal conocimiento de las estructuras de comando del equipo, del flujo de las seales de mando, y de la secuencia operativa de la mquina, entre otros. En muchas aplicaciones, esta informacin se presenta en forma de diagramas de secuencia o esquemas circuitales, cuya correcta interpretacin es imprescindible. En otros casos, sern las personas a cargo del mantenimiento, quienes ante su carencia deban confeccionar esta documentacin de base, sin la cual no sera aplicable ningn mtodo para la deteccin sistemtica de la falla, debindose recurrir a mtodos de tanteo que ms que una solucin son a menudo fuentes de ms problemas. En lo que sigue nos ocuparemos de incorporar los conocimientos bsicos necesarios para la interpretacin y/o realizacin de la documentacin tcnica de base y la aplicacin de un mtodo de deteccin sistemtica. 1.1 Estructura de las mquinas Una mquina conforma bsicamente dos partes bien definidas: La parte operativa, tambin llamada de potencia, formada por el conjunto de elementos en donde se llevan a cabo las acciones propias del proceso de trabajo. El mando, tambin llamado parte del comando, en donde se generan las rdenes que gobiernan el conjunto de elementos de la parte operativa. Entre ambas partes existe una fluida comunicacin. El mando comunica rdenes a la parte operativa, sta ejecuta las acciones correspondientes e informa al mando su evolucin. En funcin de la informacin recibida, el mando elabora nuevas rdenes, las que sern ejecutadas en la parte operativa y su evolucin nuevamente reportada al mando. Esta situacin se repite hasta completar un ciclo de trabajo.
<
CONCEPTOS BSICOS
<
El mando slo emite nuevas rdenes cuando recibe confirmacin del cumplimiento de la orden precedente en la parte operativa. Esta modalidad, orden confirmacin orden, es conocida con el nombre de mando por cadena cerrada. Las garantas operativas que ofrece la convierten en la ms difundida en el campo de la automatizacin industrial. Ciertos automatismos carecen de flujo de informacin desde la parte operativa al mando. ste genera, por lo tanto, las rdenes en forma independiente de las acciones de la parte operativa y por supuesto sin garanta de cumplimiento. La modalidad orden orden orden, es conocida con el nombre de mando por cadena abierta. Su aplicacin es cada vez ms relegada a automatismos simples y poco comprometidos. 1.2 El concepto de mando Mando o mandar es la accin originada en un sistema sobre el cual uno o varios parmetros (seales) de entrada, modifican segn leyes del propio sistema a otros parmetros (seales) considerados de salida.
El bloque de mando
A menudo, el trmino mando es utilizado no slo para designar la accin de mandar, sino tambin como denominador del sistema en el cual se genera la accin. En tal sentido, lo hemos considerado en el apartado anterior. 1.3 Las seales de mando Las seales son el lenguaje por medio del cual se comunican entre si el mando y la parte operativa de la mquina. A travs de ellas, el mando comunica las rdenes a la parte operativa y sta informa su evolucin al mando. Por medio de seales tambin se vinculan entre si la mquina y su operador. La orden o informacin transmitida se manifiesta por medio de cambios en el valor de un parmetro fsico caracterstico de la seal (tensin, posicin, presin, etc.)
10
MICRO
Origen de la seal
<
Parmetros fsico caracterstico
Naturaleza de la seal
Informacin u orden transmitida Avanzar herramienta Posicin alcanzada por un actuador Marcha o detecin de un motor Avanzar o esperar
Lleva de un tomo automtico Fin de carrera neumtico Contacto elctrico
Dimensin (radio de la leva) Presin
Mecnica
Neumtica
Tensin
Elctrica
Semforo
Color
ptica
Termmetro
Temperatura
ptica
Valor de la temperatura
Sirena de bomberos
Nivel sonoro
Ejemplos de seales segn origen y naturaleza
Acstica
Incendio
Tipo de Seales 1.3.1 Seales analgicas Se dice que una seal es analgica cuando las magnitudes de la misma se representan mediante variables continuas, anlogas (relacin de semejanza entre cosas distintas) a las magnitudes que dan lugar a la generacin de esta seal. Las seales continuas son aquellas que pueden tomar un nmero infinito de valores y cambiar ininterrumpidamente sin escalonamientos ni discontinuidades. La mayora de las magnitudes fsicas de la naturaleza varan de forma continua.
Ejemplo A lo largo de un da la temperatura no vara entre 20 C 25 C de forma instantnea, sino que alcanza todos los infinitos valores que entre ese intervalo se encuentra.
Seales digitales Son aquellas en las que el mensaje transmitido est definido para un nmero finito de campos de variacin del parmetro fsico caracterstico. Cada campo de variacin tiene asignado un mensaje.
<
CONCEPTOS BSICOS
<
11
Seales binarias Las seales binarias, en realidad, son seales digitales, en las que el mensaje est definido en slo dos campos de variacin del parmetro fsico caracterstico. La seal nicamente contiene dos mensajes: SI/NO, ABIERTO/CERRADO, MARCHA/ PARADA, VERDADERO/FALSO, ALTO/BAJO, etc. Denominaremos a estos estados 0 y 1, evitando el uso de otras designaciones paralelas.
Los equipos neumticos industriales son generalmente del tipo todo o nada, vale decir que los distintos elementos del sistema pueden adoptar slo dos estados definidos. Ejemplo Los cilindros tendrn sus vstagos retrados o extendidos. Los finales de carrera estn actuados o no. Una vlvula conmuta su posicin o no. Este tipo de comportamiento que podramos definir como binario, es logrado mediante seales de mando binarias de naturaleza neumtica.
12
MICRO
Aclaramos que ciertos equipos industriales utilizan slo la energa neumtica en la parte de potencia. En tanto la parte del comando, es realizada sobre una base elctrica, por medio de rels o sistemas electrnicos de mando, que sern comandados por seales binarias de naturaleza elctrica o electrnica. Estas seales son adecuadamente convertidas y amplificadas en neumticas para el gobierno de los rganos de potencia. 1.4 La cadena de mando Hasta el momento, el mando fue considerado como un bloque, al cual ingresaban seales (informaciones) provenientes de la parte operativa, y en funcin de leyes propias salan seales (rdenes) hacia la parte operativa. A continuacin, analizaremos ms detalladamente este bloque, siguiendo el flujo de seales desde su entrada hasta su salida.
Ejemplos de seales segn origen y naturaleza
1.4.1
Bloque de entrada El bloque de entrada est conformado por el conjunto de elementos a travs de los cuales ingresan al mando las seales de la parte operativa. La seal recibida, de cualquier naturaleza, es convertida a la adecuada al mando y transmitida a la unidad de tratamiento. Dependiendo de la tecnologa utilizada en el mando, el bloque de entrada est compuesto por finales de carrera neumticos, elctricos o electrnicos, tales como: Sensores de proximidad inductivos, fotoelctricos, capacitivos, magnticos, presstatos o en general cualquier elemento que permita detectar un acontecimiento en la mquina accionada.
<
<
CONCEPTOS BSICOS
<
13
1.4.2
Bloque de comunicacin Hombre Mquina Es el complemento indispensable del mando. Permite al operador, entre otras cosas: Intervenir en el momento del arranque, efectuar paradas de emergencia, realizar acciones alternativas y, controlar permanentemente el desarrollo de las operaciones por medio de sistemas de sealizacin. Esta ltima funcin es realizada por medio de auxiliares de mando con intervencin humana (botoneras, pulsadores, palancas, pedales, etc.) y seales luminosas. En automatismos ms complejos, dicha accin es ejecutada mediante pupitres, consolas, mmicos y unidades de programacin -como en el caso de los controladores electrnicos programables (PLC)-.
1.4.3
Bloque de tratamiento Es el verdadero cerebro del mando; recibe las seales provenientes de la unidad de entrada, las procesa segn leyes preestablecidas y emite las seales de accin. Segn la importancia y complejidad del automatismo, este tratamiento puede ser realizado por intermedio de rels, contactores auxiliares, temporizadores electrnicos programables.
1.4.4
Bloque de salida El bloque de salida est constituido por el conjunto de elementos receptores de las seales emitidas por la unidad de tratamiento. Estos elementos gobiernan el flujo energtico dirigido a los rganos de trabajo. Las seales recibidas desde la unidad de tratamiento son simplificadas y/o convertidas a las formas convenientes requeridas por los rganos ejecutores de la unidad de salida. Lo componen: Contactores de potencia. Vlvulas y electrovlvulas distribuidoras (hidrulicas/neumticas) Transductores en general, etc.
1.4.5
Accionamiento de potencia Est formada por el conjunto de elementos ejecutores de las rdenes del mando (parte operativa). La energa recibida del bloque de distribucin es transformada en trabajo til y transferida a la mquina. La componen todo tipo de: Motores (elctricos, hidrulicos, neumticos, etc.). Actuadores lineales y rotantes neumticos e hidrulicos, entre otros. Destacamos que al mencionar los distintos componentes de cada bloque, hemos tratado de representar el caso ms general de las mquinas, cualesquiera fueren las energas utilizadas en la parte de mando y potencia. En este texto, nos ocuparemos solamente de los equipos que utilizan energa neumtica en ambos casos.
14
MICRO
Tipos de mandos
2.1
Clasificacin de los mandos
Clasificacin de los mandos
2.1.1
Mandos de accin directa o piloto Son aquellos en los cuales las acciones, en la parte operativa, se corresponden en forma directa con acciones de mando; desaparecidas estas ltimas, desaparecen tambin las primeras. El mando no posee ningn tipo de memoria. Ejemplo El Timbre domiciliario, la bocina de automvil, la luz de stop.
Mando neumtico de accin directa aplicado a un dispositivo de marcacin de piezas
<
<
TIPOS DE MANDOS
<
15
2.1.2
Mandos de accin retenida Son aquellos en los cuales las acciones en la parte operativa se corresponden con acciones de mando, mantenindose an cuando stas sean eliminadas. El cese de las acciones en la parte operativa slo ocurrir cuando se opere una accin de mando contraria. Esta modalidad requiere imprescindiblemente de elementos con memoria o dispositivos que permitan la retencin de las acciones (seales) de mando.
Mando de accin retenida aplicado a la sujecin de piezas para su perforado
Ejemplo Encendido de luces domiciliarias, luz de posicin de automviles, etc. 2.1.3 Mandos programados Mandos por programas de tiempos Son aquellos en los cuales las acciones en la parte operativa ocurren en correspondencia con acciones de mando originadas en un programa de tiempos. El programa puede estar contenido en: Programadores de levas o discos programadores de clavijas, tarjetas o cintas perforadas, cintas magnticas, circuitos electrnicos, etc. Ejemplo Ciclo de lavado de un lavarropas semiautomtico. Apagado de luces de escalera, etc. Este tipo de mando, tambin llamado de cadena abierta, presenta el inconveniente de no dar garantas en cuanto al efectivo cumplimiento de las acciones en la parte operativa. Dado que las acciones de mando ocurren en funcin del tiempo; se producirn, se hayan hecho efectivas o no, las acciones correspondientes en la parte operativa. Su aplicacin es limitada a equipos de poco compromiso en este sentido.
16
MICRO
Mando por programa de tiempos gobernando un actuador de simple efecto
Mando por programa de recorridos Son aquellos en los cuales las acciones en la parte operativa ocurren en correspondencia con acciones de mando originadas en funcin del recorrido alcanzado por los propios elementos gobernados. Ejemplo El final de carrera elctrica de un ascensor. Esta modalidad de mando requiere imprescindiblemente de sensores de posicin (finales de carrera). El programa queda determinado exclusivamente por el recorrido de los elementos gobernados y por la disposicin de los finales de carrera. El orden de ejecucin lo establecen las propias acciones de la parte operativa (programa de recorridos). No existe orden de ejecucin ms que aquel resultante de dichas acciones. Esta forma de mando garantiza el cumplimiento de las acciones en la parte operativa.
Mando neumtico por programa de recorridos aplicado a un dispositivo alimentador
<
<
TIPOS DE MANDOS
<
17
Mando de evolucin secuencial Son aquellos en los cuales las acciones en la parte operativa ocurren segn el orden preestablecido en un programa central que evoluciona a pasos. Los pasos del programa son independientes unos de otros. Slo pueden ejecutarse si fueron previamente ejecutados los anteriores. Existe prioridad del paso anterior (secuencialidad). La concrecin de cada paso del programa es reportada al mando por sensores de posicin (finales de carrera) ubicados en la parte operativa. Queda de este modo garantizado el cumplimiento de acciones en esta ltima y tambin su orden de ejecucin. El programa puede estar almacenado en algn tipo especial de memoria (secuenciadores neumticos o electrnicos, controladores programables, etc.) y slo evoluciona paso a paso. El programa puede contener bucles, bifurcaciones, secuencias especiales de emergencia, etc. Las garantas que ofrece este tipo de mando lo convierten en el de aplicacin corriente en los ms modernos y complejos equipos automatizados.
18
MICRO
Representacin de las fases operativas de una mquina
3.1
Formas de representacin de las fases operativas de una mquina La complejidad siempre creciente de los automatismos industriales se traduce en cada vez mayores dificultades para definir de modo claro, y no ambiguo, el desarrollo de las fases operativas del equipo y sus estados de conmutacin. Las extensas descripciones literales resultan de difcil o confusa interpretacin, por lo que se hace imprescindible adoptar mtodos de representacin claros y concretos, ya sea en forma literal o grfica. Seguidamente indicaremos distintos mtodos para la representacin de las fases operativas de las mquinas. Si bien todos son de aplicacin general, ser el grado de complejidad del equipo el que defina al ms adecuado en cada caso. Es importante destacar que las formas de representacin son independientes de la tecnologa utilizada, por consiguiente, sern aplicables para centrales de mando neumtico, hidrulico, mecnico, elctrico, electrnico o combinaciones de stos.
3.1.1
Representacin descriptiva simplificada Fase 1 Fase 2 Fase 3 Fase 4 A extiende su vstago, el cilindro A sujeta la pieza. B extiende su vstago, el cilindro B acciona el punzn de marcacin. B retrae su vstago, el cilindro B retrocede. A retrae su vstago, el cilindro A libera la pieza.
3.1.2
Representacin abreviada con vectores En este caso el movimiento de los cilindros o actuadores se representa por vectores. Se adopta convencionalmente la simbologa que a continuacin se indica:
<
Salida (extensin) del vstago Entrada (retraccin) del vstago
Ejemplos A
Fase 1 Fase 2 Fase 3 Fase 4
A B B B
<
REPRESENTACIN DE LAS FASES OPERATIVAS DE UNA MQUINA
<
19
B
Fase 1 Fase 2 Fase 3 Fase 4 A B B A C Acciones simultneas C
3.1.3
Representacin abreviada con signos En este caso, el movimiento de los cilindros o actuadores es designado con los signos ms (+) y menos (-). Se adopta convencionalmente: + Salida (extensin) del vstago Entrada (retraccin) del vstago
A continuacin, podemos sealar algunos casos a modo de ejemplos:
Fase 1
Fase 2
Fase 3
Fase 4
1) 2) 3)
A+ A+ A+
B+ B+ B+
BB-C+ BC+
AA-CAC-
Acciones simultneas
3.1.4
Representacin en forma de diagramas Diagrama Espacio Fase En este diagrama se representa la secuencia de accin de las unidades de trabajo y el encadenamiento de las seales de mando. Se utilizan para ello dos ejes coordenados. En el eje vertical se representa el estado de los actuadores del sistema, utilizando valores binarios (0 1). Se adopta el valor 0 para indicar la posicin de reposo del elemento (motor detenido, cilindro con vstago retrado, etc.) y el valor 1 para identificar el estado del elemento actuado (motor en marcha, cilindro con su vstago extendido, etc.). Estas designaciones constituyen una prctica corriente, no obstante dejamos aclarado su carcter de convencional. En el eje horizontal se ensean las fases en que se subdivide el ciclo de trabajo. stas se caracterizan por la modificacin o cambio de estado de un elemento constitutivo del mando. Dichos cambios se indican con lneas verticales auxiliares sobre el diagrama, que denominaremos lneas de fase.
20
MICRO
Representacin de los rganos de trabajo A continuacin, veremos las siguientes reglas y smbolos bsicos utilizados en las representaciones: Los actuadores (neumticos o hidrulicos) se representan por lneas. Las lneas horizontales representan estados de reposo del elemento (fases 1 y 3). Las lneas inclinadas significan movimientos del mismo (fases 2 y 4).
Las lneas con distintas inclinaciones evidencian velocidades diversas de movimiento, por ejemplo: Aproximacin rpida, trabajo lento y retorno rpido (fases 1, 2 y 3) como se percibe en la siguiente figura:
El arranque y parada de motores se indica con una lnea vertical desde el estado 0 al estado 1 y viceversa.
Los motores con posibilidad de giro en dos sentidos se representan como est en la figura. El nivel 1 superior indica, por ejemplo, la rotacin en el sentido horario, en tanto el inferior en sentido contrario. El 0 central indica reposo (motor detenido).
<
<
<
REPRESENTACIN DE LAS FASES OPERATIVAS DE UNA MQUINA
21
Los motores con aceleracin y desaceleracin prolongada pueden representarse (caso de inversin del giro) como se muestra en la figura consecutiva:
Cuando en un mando existen varios elementos de trabajo, stos se representan individualmente uno debajo del otro estableciendo su relacin por medio de las lneas de fase.
Representacin de los elementos de sealizacin Los elementos de sealizacin son aquellos que al ser actuados emiten una seal capaz de modificar el estado de algn componente del mando.
22
MICRO
Representacin de la cadena de seales La vinculacin entre los distintos elementos del mando lo establecen las seales. stas se representan con lneas, las que tendrn un origen y un destino. Su origen ser un elemento de sealizacin y su destino aquel cuyo estado deba ser cambiado (vlvula o cilindro). El sentido de la seal es indicada por una flecha. Se respetarn los smbolos grficos establecidos en la tabla siguiente:
RECUERDE que... Debe tratar que los principios de representacin y los smbolos utilizados sean siempre iguales en todos los casos, a efectos de lograr que la lectura y comprensin pueda realizarse sin dificultad e inequvocamente. Ejemplo de aplicacin del diagrama Espacio Fase Representar en forma de diagrama Espacio Fase la siguiente secuencia de mquina, expresada en forma literal abreviada con signos: A+, B+, A - C+, BC
Se exige un funcionamiento a ciclo simple. El inicio se producir oprimiendo un comando bimanual y estar condicionado a la finalizacin del ciclo anterior. Representacin de los actuadores y el encadenamiento de seales.
<
<
REPRESENTACIN DE LAS FASES OPERATIVAS DE UNA MQUINA
<
23
Representacin de los actuadores, el encadenamiento de seales y el estado de pilotaje de las vlvulas principales.
Diagrama Espacio Tiempo El diagrama Espacio Tiempo constituye una variante del diagrama Espacio Fase, en cual se indican los tiempos de reemplazo de las fases utilizadas en aqul. Cuando el tiempo de ejecucin constituye una variable de consideracin en el equipo, la escala de tiempos simplemente se superpone a la de fases. Valen para este diagrama las mismas reglas y smbolos grficos ya mencionados. Su aplicacin resulta adecuada en aquellos mandos programados en funcin del tiempo, en tanto que el Espacio Fase lo es para los mandos por programa de recorridos y de evolucin secuencial.
24
MICRO
Diagrama funcional Grafcet Un diagrama funcional es una representacin grfica que permite describir las funciones operativas de un automatismo. Qu es el Grafcet? El Grafcet es un diagrama funcional. Fue desarrollando en 1977, por la Asociacin Francesa para la Ciberntica Econmica y Tcnica. Y constituye un paso importante para la unificacin de la representacin del conjunto de condiciones de un automatismo lgico. Tiene un nombre propio para distinguirlo de otros diagramas funcionales y formas de representacin existentes, como lo son los diagramas de Girard, organigramas lgicos y diagramas DIN 40719, etc. La denominacin responde a las siglas de Grfico de Comando Etapa Transicin (GRAFCET). Desarrollo del Grafcet El funcionamiento del automatismo quedar representado grficamente por un conjunto de: Etapas o pasos: A las que estn asociadas las acciones de la mquina. Transiciones: A las que van asociadas las condiciones que permiten el paso de una etapa a la siguiente. Enlaces: Vinculan las etapas a las transiciones y viceversa. A continuacin, se explicar en forma ms detallada lo anteriormente mencionado. Etapas o pasos Las etapas o pasos son un cuadro con nmero distintivo en su interior. Las acciones a efectuar cuando la etapa sea activada, sern descriptas de manera literal y/o simblica en el interior de uno o varios rectngulos ligados a la etapa en una parte derecha (como muestra la primera figura). Las etapas normalmente activas al inicio del funcionamiento se indicarn con doble recuadro sobre el smbolo correspondiente (como muestra la segunda figura).
Transiciones Las transiciones representan las condiciones necesarias finales que deben ser satisfechas para poder ejecutar el paso siguiente. Se representan grficamente con un guin cruzando perpendicularmente la lnea de enlace que vincula los pasos. La condicin asociada puede ser expresada en forma literal o bajo la forma de combinacin lgica de informaciones provenientes de la parte operativa: Finales de carrera, temporizadores, contadores, directivas del operador, estado activo o inactivo de otras etapas, etc.
<
<
REPRESENTACION DE LAS FASES OPERATIVAS DE UNA MQUINA
<
25
Enlaces Los enlaces indican los caminos de evolucin del Grafcet. Estos enlaces sern siempre horizontales o verticales, salvo casos especiales donde las lneas oblicuas aporten claridad al diagrama. El sentido general ser vertical desde arriba hacia abajo. La llegada y la partida a las etapas sern representadas verticalmente. La llegada se har por la parte superior del cuadrado caracterstico de la etapa, en tanto la salida se efectuar por su parte inferior. Seguidamente daremos reglas para la representacin grfica de distintas posibilidades operacionales de la mquina. Eleccin entre varias secuencias condicionadas Cuando a la salida de una etapa o paso deba realizarse una eleccin entre varias secuencias condicionadas, se indicar como muestra la figura siguiente:
Ejemplo
26
MICRO
Realizacin de secuencias simultneas Un Grafcet puede conformar varias secuencias ejecutndose simultneamente, donde la evolucin de las etapas en cada rama permanece independiente. Para representar estos funcionamientos simultneos, una nica transicin y dos trazos paralelos indicarn el principio y el fin de dichas secuencias. Es decir, la activacin simultnea de los ramales y su espera hacia una secuencia comn.
Salto y retome de secuencias El salto acondicionado permite obviar una o varias etapas intermedias de una secuencia, cuando bajo determinadas condiciones no sea necesario ejecutarlas. El retome condicionado permite, en cambio, volver a etapas anteriores hasta tanto se obtenga una condicin prefijada para prosecucin.
<
<
REPRESENTACIN DE LAS FASES OPERATIVAS DE UNA MQUINA
<
27
Ejemplo de aplicacin del Grafcet Representacin de la secuencia de operacin de una prensa destinada a la fabricacin de piezas a partir de polvos metlicos.
Configuracin esquemtica de la mquina
1. La colocacin del material est asegurado manualmente por el operador. Un
sealador V est encendido durante todo el curso de la colocacin. Terminada aquella, el operador autoriza la continuacin de las operaciones presionando dos pulsadores simultneamente. 2. Los movimientos del punzn superior y de la matriz son efectuados por cilindros hidrulicos de doble efecto. Las posiciones alta y baja del punzn y de la matriz son controladas con la ayuda de captores de fin de carrera (respectivamente a0 y a1, b1 y b0) de naturaleza elctrica. 3. La evacuacin de la pieza es obtenida por medio de un jet de aire con una duracin de un segundo. Este chorro de aire est comandado por la electrovlvula E.
28
MICRO
La siguiente figura muestra el Grafcet operacional de la prensa en cuestin.
Grafcet operacional de la prensa
<
<
ESQUEMAS CIRCUITALES DE MANDO
<
29
Esquemas circuitales de mando
4.1
Definicin Un esquema circuital representa en forma grfica la relacin entre los distintos componentes del mando, evidenciando de esta forma la lgica operativa del mismo. El esquema circuital constituye un elemento de inestimable valor para el hombre de mantenimiento; es el comienzo del camino a recorrer para la deteccin sistemtica de fallas. Sin l, poco podra hacerse en forma racional, lo que finalmente concluye en una bsqueda por tanteos de los desperfectos con las consiguientes prdidas de tiempo, materializadas en cuantiosas prdidas de produccin. Es importante que el esquema circuital sea realizado de un modo claro, de fcil interpretacin y que pueda ser entendido por todos, para lo cual debern utilizarse smbolos de representacin normalizados, respetando adems ciertas reglas en cuanto a la disposicin de los elementos. En lo que sigue nos ocuparemos de estos aspectos.
4.2
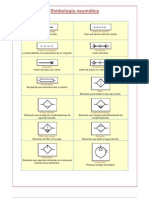
Simbologa de los elementos Los smbolos grficos indicados a continuacin responden a las Normas IRAM 4542 e ISO 1219. Aclaramos que slo indicaremos la simbologa de los elementos que con mayor frecuencia intervienen en un mando neumtico; quienes deseen profundizar el tema podrn consultar las citadas normas.
30
MICRO
<
<
GENERACIN Y DISTRIBUCIN DEL AIRE COMPRIMIDO
<
31
RECUERDE que... Una norma (por ejemplo: IRAM/ISO) es un documento establecido por consenso y aprobado por un organismo reconocido que establece, para usos comunes y repetidos, reglas, criterios o caractersticas para las actividades o sus resultados, que procura la obtencin de un nivel ptimo de ordenamiento en un contexto determinado. 4.3 Disposicin de elementos en el esquema circuital La disposicin de los elementos en el esquema circuital se realizar respetando la cadena de mando (flujo de seales) en sentido vertical ascendente:
Disposicin del esquema circuital de mando
La disposicin indicada se respetar en lo posible, excepto casos particulares en donde probablemente otra disposicin resulte ms favorable atendiendo a la realizacin, interpretacin y lectura del esquema. Como adicional, tener en cuenta las siguientes reglas grficas: La posicin de actuacin de los finales de carrera se indica con un trazo vertical en las posiciones en que son realmente actuados, con su correspondiente identificacin. El elemento se dibuja segn la disposicin anterior, es decir, en el bloque de entrada y en la posicin que resulte ms adecuada, apuntando a simplificar el trazado de las lneas de interconexin.
32
MICRO
Los elementos se dibujan en el estado determinado por su pilotaje. Aquellos elementos que en esa condicin (del equipo) queden actuados (finales de carrera), se dibujarn actuados, indicndoles la presencia de la leva (u otro elemento) sobre el mando. Las conducciones se representan por lneas lo ms rectas posibles, evitando innecesarios cruces. Las conducciones de trabajo (vlvulas direccionales a cilindros) se dibujarn con lneas continuas, en tanto que las conducciones de pilotaje con lneas de trazos. Esto ltimo, a menudo, ocasiona dificultades de lectura, prefirindose el trazo continuo ms fino para las lneas de pilotaje. Puede evitarse el trazado de las conducciones de alimentacin a las vlvulas de mando, simplemente indicando en los elementos que la requieran, el smbolo simplificado de fuente de presin. Denominacin de los elementos en el esquema 4.4 La designacin adecuada de los componentes de un mando juega un papel fundamental en la lectura e interpretacin de sus funciones. La designacin deber ser tal que aporte claridad a la lectura y una fcil determinacin del rol de cada elemento en el mando, facilitando la tarea de mantenimiento y la bsqueda de fallas. Es importante que con esos objetivos se adopte una metodologa simple y clara, sin ambigedades o indefiniciones. Existen varias formas de denominar los componentes del mando, desde las completamente literales a las totalmente numricas. Expondremos seguidamente un mtodo basado en la combinacin anterior, es decir, alfanumrico. Se adoptarn las siguientes reglas:
<
A, B, C, D
Letras maysculas del alfabeto (excepto Z) para los actuadores.
A1, B1, C1, D1
Letra identificatoria del actuador seguido de 1(uno), para las vlvulas de comando de los actuadores. Letra identificatoria del actuador seguida del 02, 04, etc. (ceros y
A02, B02, C02
pares), para elementos que actan sobre la velocidad de retorno del actuador. Letra identificatoria del actuador seguida del 03, 05, etc. (cero e
A03, B03, C03
impares) para elementos que actan sobre la velocidad de avance del actuador. Letra Z seguida de nmeros crecientes correlativos para elemen-
Z1, Z2, Z3, Z4
tos del mando cuyas funciones no son asignables a un actuador en particular o que son comunes a varios (unidades de tratamiento, vlvulas de corte de energa, memorias auxiliares, etc.)
<
GENERACIN Y DISTRIBUCIN DEL AIRE COMPRIMIDO
<
33
Disposicin del esquema circuital de mando
Cuando un elemento del mando (por ejemplo: Fin de carrera) forma parte de una cadena que origina acciones sobre ms de un actuador, llevar asociada tantas designaciones como acciones origine segn lo ya establecido.
Con la designacin adoptada para los elementos, la persona a cargo del mantenimiento frente a una detencin por falla del equipo, ver notablemente simplificada su tarea. Slo se limitar a observar en qu etapa se encuentra detenido y analizar la cadena de mando vinculada a la etapa siguiente. Por ejemplo, si la etapa siguiente fuera B- (retorno del cilindro B) deber analizar todos los elementos designados con la letra B, seguida de nmeros impares B03, B3, B5, B7, etc., y obviamente tambin B1 y el elemento de potencia B.
34
MICRO
4.5
Designacin de las lneas de conexionado Las lneas de conexionado pueden identificarse de modo similar a las elctricas, por medio de rectngulos asociados a las lneas del esquema o por medio de rtulos en la instalacin real. Cada lnea llevar una identificacin en cada extremo. En cada una de ellas se consignar, en primer lugar, el elemento correspondiente al extremo en cuestin y el nmero de la boca conectada; en segundo lugar y separado por una barra inclinada, el elemento del extremo opuesto y su boca de conexin. De esta forma, una lnea de conexin en la instalacin real podr ser leda desde ambos extremos, muchas veces distantes entre si. Resultar de suma utilidad para cablear inicialmente la instalacin, localizar posteriores errores de conexionado, seguir el flujo de las seales de mando, recablear elementos reparados o sustituidos, etc.
RECUERDE que... A efectos de no cargar excesivamente el esquema circuital y dificultar su lectura, es conveniente que la designacin de las lneas de conexionado se realice en un esquema separado, respetando la ubicacin adoptada en el primero, pero omitiendo los detalles internos de los smbolos (vas y posiciones u otras).
<
<
DOCUMENTACIN TCNICA
<
35
Documentacin tcnica
5.1
Lista de materiales A los efectos de una rpida e inequvoca determinacin de las especificaciones tcnicas de los componentes y las cantidades que intervienen en un mando, resulta de suma utilidad la elaboracin de una lista de materiales, en donde se consignen: La denominacin del componente, en concordancia con lo establecido en el esquema circuital. Las especificaciones tcnicas resumidas. Los cdigos de identificacin internos y/o del fabricante. Las cantidades totales por modelo. El nombre del fabricante, etc. Esta lista de materiales formar parte del plano o esquema circuital, el que tambin contendr la representacin grfica de la secuencia operativa de la mquina (diagrama Espacio Fase, Grafcet, u otro).
Disposicin tpica de un plano como el descrito, que incluye diagrama Espacio Fase, esquema circuital y lista de materiales
36
MICRO
5.2
Croquis de instalacin Consiste fundamentalmente en un croquis no necesariamente muy elaborado, que refleje la posicin real que en el equipo tienen los actuadores, sus finales de carrera y eventualmente tambin las vlvulas principales. Este croquis facilitar al hombre de montaje o mantenimiento, la identificacin de los elementos en la instalacin real, en concordancia con los del esquema circuital, a la vez de clarificar el dilogo entre quien reporta las fallas o anomalas y la persona a cuyo cargo se encuentre la reparacin. Es importante que este croquis muestre algunos detalles mecnicos del equipo, a efectos de establecer una clara relacin entre los elementos y la mquina, facilitando as la ubicacin.
Ejemplo de un croquis de instalacin
<
<
<
37 6 INTERPRETACIN DE LOS ESQUEMAS DE MANDO
Interpretacin de los esquemas de mando
6.1
Interpretacin de los esquemas circuitales de mando La finalidad de los siguientes apartados ser la de incorporar en forma gradual las estructuras bsicas de la tcnica neumtica de mando. stas permiten concretar e interpretar posteriormente esquemas de mando ms complejos. La correcta interpretacin de los esquemas de mando constituye la base para la deteccin sistemtica de las fallas.
6.1.1
Mandos neumticos bsicos Ejercitacin A continuacin, resolver los siguientes automatismos, teniendo en cuenta las particularidades sealadas en cada uno de los ejercicios. Ejercicio N 1 Mando directo de un cilindro de simple efecto por vlvula monoestable de comando manual por pulsador.
Ejercicio N 2 Mando directo de un cilindro de simple efecto con vlvula biestable de comando manual a palanca:
38
MICRO
Ejercicio N 3 Mando directo de un cilindro de doble efecto con vlvula monoestable de comando manual a palanca:
Ejercicio N 4 Mando directo de un cilindro de doble efecto con vlvula biestable de comando manual a palanca:
Ejercicio N5 Mando indirecto de un cilindro de simple efecto con vlvula monoestable mandada por una seal neumtica proveniente de una vlvula 3/2 accionada manualmente:
<
<
INTERPRETACIN DE LOS ESQUEMAS DE MANDO
<
39
Ejercicio N 6 Mando indirecto de un cilindro de simple efecto con vlvula biestable mandada por dos seales neumticas provenientes de sendas vlvulas 3/2 de comando manual:
Ejercicio N 7 Mando indirecto de un cilindro de doble efecto con vlvula monoestable gobernada por una seal neumtica proveniente de una vlvula 3/2 accionada manualmente:
Ejercicio N 8 Mando indirecto de un cilindro de doble efecto con vlvula biestable comandada por seales neumticas provenientes de dos vlvulas 3/2 accionadas por pulsador:
40
MICRO
Conclusiones Para accionar un cilindro de simple efecto se utiliza una vlvula 3/2, en tanto que para uno de doble efecto deben utilizarse vlvulas 4/2 5/2. Las vlvulas pueden ser monoestables (una nica posicin de reposo) o biestables (reposo indistinto en ambas posiciones). El uso de vlvulas monoestables conduce a mandos de iguales caractersticas, es decir, que la accin en la parte operativa se mantiene en tanto sea mantenida la accin de mando (ver mando piloto). El uso de vlvulas biestables conduce a mandos tambin biestables, es decir que la accin perdura aunque se haya suprimido la accin de mando y slo cesa cuando se opere una seal de mando contraria (ver mando de accin retenida o memorizada). 6.1.2 Mandos con realimentacin de seal Mediante la tcnica de realimentacin es posible convertir un mando piloto (de comportamiento monoestable) en uno de accin retenida o memorizada (de comportamiento biestable), an utilizando vlvulas monoestables. Retornando al ejercicio N 7, vemos que si tomamos seal de la va que alimenta la cmara trasera del cilindro, como muestra la figura, y a travs de una vlvula O la ingresamos a la cadena de seales de mando, toda vez que se oprima el pulsador A2, el cilindro A extender su vstago, permaneciendo all aunque A2 deje de ser actuado. El piloto de A1 es ahora realimentado con seal a travs de A4 proveniente de una va de alimentacin del cilindro, logrndose as un comportamiento biestable del mando. Para retornar el cilindro a su posicin de reposo, bastar interrumpir la realimentacin, como se muestra en la segunda figura, mediante el pulsador A3 normalmente abierto.
<
<
INTERPRETACIN DE LOS ESQUEMAS DE MANDO
<
41
La realimentacin tomada de las vas de utilizacin de los cilindros es susceptible a interferencias provocadas por el movimiento del actuador. stas se hacen notables cuando los actuadores son de grandes dimensiones, no siendo la realimentacin efectiva hasta tanto el actuador alcance su posicin final de carrera, lo que obliga a mantener el pulsador oprimido durante un perodo prolongado. Una mejora notable de esta condicin se logra realimentando desde una vlvula intermedia (A6) como muestra la figura:
El comportamiento del mando ser ahora anlogo al del ejercicio N 8, pero utiliza mayor cantidad de componentes y por lo tanto, es ms costosa su implementacin. Los circuitos con realimentacin son aplicables cuando, por razones de seguridad y antes falta de suministro de aire comprimido, se exija que el mando retorne a posicin de reposo al ser aquel restituido. Si analizamos el funcionamiento del circuito de la anterior, veremos que oprimiendo A2 y A3 simultneamente, prevalece la accin de A2 y por lo tanto el cilindro A avanza. El mando se llamar de marcha prevaleciente.
Muestra una solucin equivalente pero con caractersticas de paro prevaleciente
42
MICRO
El circuito subsiguiente muestra otra forma de lograr la realimentacin de seal:
6.1.3
Mando automtico elemental de un actuador Ejercitacin Ejercicio N 9 Un cilindro de doble efecto debe ejercer su accin al oprimir un pulsador. El retorno debe ser automtico una vez alcanzada la posicin final de carrera.
a)
<
Con vlvula 5/2 biestable de comando indirecto.
b)
Con vlvula 5/2 monoestable de comando indirecto y realimentacin.
<
INTERPRETACIN DE LOS ESQUEMAS DE MANDO
<
43
Los circuitos mostrados representan el inconveniente de que si el pulsador A2 se mantiene oprimido, la secuencia se interrumpe con el vstago del cilindro extendido. La seal de final de carrera no se logra en razn de la presencia en la vlvula A1 y A6, respectivamente, de la seal del pulsador. Por otro lado, el ciclo podra comenzar en cualquier punto de la carrera de retorno, sin que haya sido completado el ciclo anterior. Esto es en razn de que el pulsador A2 est permanentemente alimentado y en consecuencia es capaz de emitir seal toda vez que sea oprimido. 6.1.4 Mando automtico elemental con inicio condicionado Resuelva los siguientes automatismos: Ejercicio N 10 Un cilindro de doble efecto debe ejercer su accin al oprimir un pulsador, pero slo si el cilindro se encuentra con su vstago retrado. El retorno ser automtico una vez alcanzada la posicin final de carrera. El ciclo debe completarse, an cuando se mantenga oprimido el pulsador.
a) Con vlvula 5/2 monoestable de comando
indirecto.
b) Con vlvula 5/2 monoestable de comando
indirecto y realimentacin.
Ahora bien, compara la solucin con la del ejercicio N 9. La presencia del final de carrera A2 en la posicin de reposo asegura alimentacin al pulsador, slo cuando el vstago se encuentra retrado, lo cual garantiza el cumplimiento del ciclo aunque aqul permanezca oprimido. La conexin real de A2 y A4 configura una condicin lgica Y para el arranque. Es decir, para que el ciclo comience, deben verificarse simultneamente el accionamiento de A2 en la mquina y el de A4 por el operador. Ejercicio N 11 Se pretende lograr un sistema de iguales caractersticas que las del ejercicio N 10, pero el inicio deber lograrse indistintamente desde dos pulsadores distantes entre si. Esta exigencia implica una condicin lgica O de inicio.
44
MICRO
El avance del cilindro A se podr concretar bien desde A4 o desde A6, vinculados mediante la selectora A8 (vlvula O). El final de carrera A2 en serie cumple las funciones ya descriptas en el ejercicio N 10, estableciendo una condicin Y de inicio. La solucin mostrada en el esquema de la segunda figura presentada para el conjunto A2, A4, A6 y A8 es equivalente a la anterior, slo que en la condicin Y de inicio es lograda mediante una vlvula de simultaneidad (A10).
Ejercicio N 12 Implementar el conexionado de vlvulas O para que el ciclo del ejercicio N 11 pueda ser iniciado indistintamente desde cuatro pulsadores distantes entre si.
<
<
INTERPRETACIN DE LOS ESQUEMAS DE MANDO
<
45
Ejercicio N 13 Se pretende lograr un sistema de iguales caractersticas que el ejercicio N 10, pero el inicio deber lograrse slo si son oprimidos simultneamente dos pulsadores (uno Y, otro de un comando bimanual). Esto implica una condicin lgica Y de inicio entre los dos pulsadores de marcha.
El avance del cilindro A podr concretarse slo cuando se encuentren oprimidas A4 y A6 por el operador, y adems el fin de carrera A2 en la mquina. El esquema circuital que presenta la figura muestra una solucin equivalente utilizando vlvulas de simultaneidad o vlvulas Y.
46
MICRO
<
Las vlvulas de simultaneidad A8 y A10 del esquema anterior, pueden ser reemplazadas por vlvulas 3/2 monoestables de pilotaje neumtico, como muestra el esquema siguiente:
Ejercicio N 14 Implementar el conexionado de vlvulas Y para que el ciclo del ejercicio N 13 pueda ser iniciado si se oprimen simultneamente cuatro pulsadores, constituyendo un comando de seguridad a cuatro manos.
<
INTERPRETACIN DE LOS ESQUEMAS DE MANDO
<
47
6.1.5
Mandos alternativos Ejercitacin Ejercicio N 15 Se pretende con un nico pulsador gobernar el avance y retroceso de un cilindro de doble efecto. Al oprimir el pulsador, debe producirse en forma alternativa el avance y el retroceso del vstago.
a) Con finales de carrera.
b) Con vlvula auxiliar 5/2 y vlvulas O (sin finales de carrera).
48
MICRO
c) Con vlvula auxiliar 5/2 y dos vlvulas 3/2 monoestables (sin finales de carrera).
d) Con vlvula auxiliar 5/2 y vlvulas Y (sin finales de carrera).
RECUERDE que... Las vlvulas neumticas son los dispositivos que dirigen y regulan el aire comprimido, gobiernan la salida y la entrada, el cierre o habilitacin, la direccin, la presin y el caudal de aire comprimido.
<
<
INTERPRETACIN DE LOS ESQUEMAS DE MANDO
<
49
6.1.6
Mandos para regulacin de velocidad en actuadores neumticos Como norma general, la regulacin de velocidad de los actuadores neumticos debe hacerse, siempre y en lo posible, sobre la va de descarga del actuador. De este modo y dentro de valores compatibles con la elasticidad del aire comprimido, podrn lograrse regulaciones estables de la velocidad. La elasticidad del medio influye notablemente en las bajas velocidades, fijndose para las regulaciones neumticas un lmite prctico inferior que oscila entre los 30 y 50 mm/seg, dependiendo, adems, del tamao del actuador, caractersticas de la carga sobre el vstago, calidad del regulador empleado, presin de alimentacin, etc. Cuando deban obtenerse movimientos estables con velocidades inferiores al lmite sealado, deber recurrirse a sistemas hidroneumticos o hidrulicos de avance, cuyo lmite de regulacin en trminos prcticos puede ser tan bajo como se quiera. La regulacin por las vas de alimentacin resta fuerza a los actuadores y resulta inestable an a altas velocidades, razn por la cual slo deben ser empleadas cuando no exista otra alternativa y en donde adems no se requiera estabilidad de regulacin. Regulacin en actuadores de simple efecto
En este tipo de actuadores no queda otra solucin ms que regular su va de alimentacin con las limitaciones ya enunciadas. Avance regulado y retorno normal
Avance regulado y retorno normal
50
MICRO
<
50
Avance y retorno regulados no independientes
Avance y retorno regulados independientes
Avance normal y retorno rpido .
<
INTERPRETACIN DE LOS ESQUEMAS DE MANDO
<
51
Avance regulado y retorno rpido
Regulacin en actuadores de doble efecto En este caso es posible aplicar la norma general de regulacin. Avance regulado y retorno normal
a) Con vlvula direccional 4/2.
b) Con vlvula direccional 5/2.
52
MICRO
<
Avance normal y retorno regulado a) Con vlvula direccional 4/2.
b) Con vlvula direccional 5/2.
Avance y retorno regulados no independientes
<
INTERPRETACIN DE LOS ESQUEMAS DE MANDO
<
53
Avance y retorno regulados e independientes
a) Con vlvula direccional 4/2.
b) Con vlvula direccional 5/2.
Avance y retorno rpido
Indistintamente con vlvulas 4/2 5/2.
54
MICRO
Avance regulado y retorno rpido a) Con vlvula direccional 4/2.
b) Con vlvula direccional 5/2.
Avance rpido y retorno regulado a) Con vlvula direccional 4/2.
<
<
INTERPRETACIN DE LOS ESQUEMAS DE MANDO
<
55
b) Con vlvula direccional 5/2.
Conclusiones y comentarios
1. La disminucin de velocidad en actuadores neumticos se logra con reguladores
de caudal unidireccionales o bidireccionales.
2. El aumento de velocidad se logra con vlvulas de escape rpido. stas permiten
aumentar la velocidad media de un actuador entre un 40 y un 60 % respecto de la velocidad con descarga normal.
3. La velocidad puede regularse (segn el caso) sobre las vas de utilizacin de las
vlvulas o sobre los escapes de stas. Es ms efectiva la primera y ms lo es cuanto ms cerca del actuador se efecte la regulacin.
4. Las vlvulas de escape rpido se instalarn lo ms cerca posible del actuador.
Las conexiones entre ste y la vlvula de escape sern como mnimo del mismo tamao que la conexin del actuador si quieren obtenerse plenos resultados.
5. Las vlvulas 5/2 ofrecen siempre mayores alternativas para la regulacin que las
vlvulas 4/2. 6.2 6.2.1 Temporizaciones neumticas Esquemas bsicos de temporizaciones Temporizacin con retardo a la apertura:
56
MICRO
Temporizacin con retardo al cierre:
Prolongacin de una seal:
<
Retardo de la conexin y desconexin (retardo y prolongacin):
Monopulso Generador de impulso nico:
<
INTERPRETACIN DE LOS ESQUEMAS DE MANDO
<
57
6.2.2
Mandos programados en funcin del tiempo Resuelve los siguientes ejercicios: Ejercicio N 16 Se pretende que un cilindro neumtico acte al oprimir un pulsador. Su retorno debe producirse en forma automtica cierto tiempo despus. No se pretende asegurar la posicin alcanzada por el actuador. La solucin propuesta presenta la limitacin de que si el pulsador A2 se mantiene oprimido el ciclo no se completa. La seal de A3 no puede hacerse efectiva en A1 por la presencia de la seal contraria proveniente de A2.
Por otro lado, la temporizacin tomada desde la va de alimentacin del cilindro resultar imprecisa, ya que se ver afectada por las fluctuaciones de presin que sobre dicha va ocurren durante el movimiento del actuador. Esto se hace ms notorio a medida que aumentan sus dimensiones y la velocidad de desplazamiento. Las anteriores limitaciones son solucionadas en el esquema de la siguiente figura, temporizando (monopulsando) la seal A2 y tomando la temporizacin desde una vlvula 3/2 intermedia, no vinculada en forma directa con el actuador.
58
MICRO
Ejercicio N 17 Se pretende que un cilindro neumtico acte al oprimir un pulsador. Su retorno debe producirse automticamente, cierto tiempo despus de alcanzada la posicin final de carrera. El ciclo debe comenzar slo si el vstago se encuentra en posicin de reposo (retrado) y no debe poder reiniciarse hasta tanto no finalice el anterior.
RECUERDE que... Este tipo de mando presenta el inconveniente de no dar garantas en cuanto al efectivo cumplimiento de las acciones en la parte operativa. Dado que las acciones de mando ocurren en funcin del tiempo, se producirn se hayan hecho efectivas o no las acciones correspondientes en la parte operativa. 6.3 6.3.1 Mandos adicionales para marcha, operacin y emergencia Mandos a ciclo simple/continuo Hasta el momento, el inicio fue realizado mediante un accionamiento manual, la mquina ejecutaba el ciclo de trabajo y se detena a la espera de una nueva seal de inicio. Tal funcionamiento podramos definirlo como automtico a ciclo simple. Muchos equipos requieren, sin embargo, de un funcionamiento automtico en el cual dada una seal de inicio, el ciclo comience y se repita en forma sucesiva hasta tanto se d una seal de mando contraria. Un funcionamiento de tales caractersticas ser definido como automtico a ciclo continuo.
<
<
INTERPRETACIN DE LOS ESQUEMAS DE MANDO
<
59
El esquema siguiente muestra una forma simple de implementar un automtico a ciclo continuo, utilizando una vlvula 3/2 biestable de comando manual a palanca:
La condicin lgica Y de inicio lograda mediante una conexin en serie entre A2 y A4, es equivalente a la solucin mostrada a continuacin con una vlvula de simultaneidad.
La siguiente figura muestra otra posible disposicin para el funcionamiento a ciclo continuo, incorporando pulsadores independientes para marcha parada:
60
MICRO
Puede tambin resultar necesario en una mquina implementar ambas posibilidades, esto es un funcionamiento con eleccin a ciclo simple o ciclo continuo. Una forma sencilla de hacerlo se muestra en la figura mediante una vlvula selectora de circuitos o vlvula O:
La disposicin adoptada en la figura presentada es equivalente a la anterior incorporando una vlvula Y.
<
<
INTERPRETACIN DE LOS ESQUEMAS DE MANDO
<
61
A continuacin, la figura muestra una solucin ms elaborada para el requerimiento anterior, con pulsadores independientes de marcha y parada en ciclo continuo y pulsador de marcha en ciclo simple:
Obsrvese que por estar todos los pulsadores alimentados con presin, quedan habilitadas sus seales tanto sea a ciclo continuo o simple. Esto es frecuentemente indeseable, ya que al oprimir errneamente, por ejemplo, el pulsador de ciclo continuo, la mquina arrancara en ese modo cuando el deseado hubiese sido a ciclo simple. Esta limitacin se soluciona incorporando una vlvula 3/2 selectora de modo como se muestra a continuacin:
62
MICRO
El modo de operacin es seleccionado previamente por medio de la selectora. Los mandos correspondientes al modo no seleccionado son inoperantes. Obsrvese que, adems, cuando se conmuta la selectora desde ciclo continuo a ciclo simple simultneamente a travs de la vlvula A10, es borrada la memoria de marcha a ciclo continuo de la vlvula A12. La seal de borrado permanece, impidiendo la entrada de seal desde A6 (ciclo continuo marcha). 6.3.2 Mandos con opcin automtico/manual Muchas mquinas de funcionamiento a ciclos requieren frecuentemente la posibilidad de comandar en forma manual e independiente el movimiento de sus actuadores. Esto es que la mquina sea total o parcialmente comandada en forma manual, adems de su ciclo automtico. La siguiente figura muestra un esquema para implementar un mando de esas caractersticas a un cilindro de doble efecto, extensible a mltiples actuadores.
Obsrvese que la salida del cilindro puede ser obtenida va la cadena de seales A2 A6, en ciclo automtico, o va A4 en operacin manual, por medio de la vlvula A8. Idntico razonamiento se sigue con A3, A5 y A7. La misin de la selectora (Z1) ser la de conmutar la alimentacin de presin de los finales de carrera en posicin automtico a la de los pulsadores A4 y A5 en posicin manual. La figura siguiente muestra la implementacin de un manual/automtico generalizado, que incluye adems pulsadores independientes de marcha en ciclo simple, continuo y parada.
<
<
INTERPRETACIN DE LOS ESQUEMAS DE MANDO
<
63
El esquema circuital de la siguiente figura rene los requisitos del anterior, incorporando adems una selectora de ciclo simple o continuo con la confiabilidad que sta le aportaba al mando.
64
MICRO
6.3.3
Mandos de emergencia Emergencia: Por emergencia debe entenderse toda situacin anormal en la mquina, que requiera inmediata intervencin del operador para detener total o parcialmente su accionar. La solucin de un comando de emergencia (EM) no puede, salvo en casos particulares, ser totalmente generalizada, por cuanto cada aplicacin constituye un caso particular que requiere de un estudio minucioso del comportamiento frente a una situacin anormal. De hecho deben ser estudiados detenidamente los movimientos del sistema de manera que frente a tal situacin no se ejecuten acciones que puedan ser de riesgo para el operador o la mquina en si misma. Este estudio determina, en muchos casos, una secuencia de accin especial llamada rutina de emergencia. De lo dicho se deduce que un comando de emergencia no slo debe responder a la exigencia primaria de interrumpir el ciclo de trabajo, sino tambin intervenir individualmente sobre los actuadores, creando condiciones seguras para el operador y la mquina, posibilitando la eliminacin de las causas de emergencia. Independientemente de cualquier solucin adoptada, debern respetarse algunas normas generales, a saber: El comando debe ser a pulsador. El pulsador debe ser rojo y de amplia superficie para facilitar su accionamiento. Su posicin debe ser visible y de fcil acceso. Es deseable que el comportamiento del comando sea biestable. As la nueva seal de marcha ser efectiva slo si la condicin de emergencia es relevada mediante una accin intermedia que denominaremos relevo de emergencia (REM). Resulta conveniente separar el comando EM del REM.
6.3.3.1
Casos generalizables de emergencias 1. Interrupcin del ciclo al inicio. Esta solucin es aceptable cuando el ciclo es de corta duracin y donde su culminacin no acarrea riesgos al operador o a la mquina. Se logra as un comportamiento del circuito anlogo al de una parada normal de mquina. Su implementacin consiste simplemente en interrumpir la alimentacin al inicio del ciclo como muestra la figura. El circuito incorpora tambin comando de marcha a ciclo simple, continuo y parada con pulsadores independientes.
<
<
INTERPRETACIN DE LOS ESQUEMAS DE MANDO
<
65
2. Detencin del ciclo de trabajo en la etapa alcanzada. En este caso deber interrumpirse, adems, la alimentacin de los finales de carrera, con lo cual slo se completarn movimientos correspondientes a la etapa de ejecucin al momento de oprimir la emergencia.
Obsrvese que al oprimir el pulsador REM, comenzar la marcha desde la posicin de parada hasta la de reposo, permaneciendo all a la espera de una seal de marcha del operador. En muchas aplicaciones, adems de esta condicin, se exige la posibilidad de llevar en forma manual y simultnea todos los actuadores a reposo. Esto puede lograrse con un pulsador adicional de puesta a cero (P0), alimentado slo en condicin de emergencia y por medio de vlvulas O que permitan introducir la seal de P0 a los circuitos de pilotaje que gobiernan el retorno al reposo de los actuadores.
66
MICRO
3 Interrupcin de la etapa en ejecucin y retorno inmediato simultneo de todos los actuadores a posicin de reposo. Esto constituye un caso particular del anterior, en el cual, todas las vlvulas O de los circuitos de pilotaje de retorno quedan automticamente conectadas a una lnea que es alimentada en condicin de emergencia. Esta lnea es la misma que en el circuito anterior, alimentaba al pulsador de puesta a cero P0. El nuevo esquema es mostrado a continuacin.
4 Interrupcin de la etapa de ejecucin y retorno a posicin de reposo slo de algunos actuadores; los restantes deben quedar bloqueados en su posicin Para ello slo basta interferir con vlvulas O los circuitos que gobiernan el retorno de aquellos actuadores que se quieran volver a su posicin de reposo. Los restantes podrn volver oprimiendo, por ejemplo, un pulsador de puesta a cero. La realizacin de emergencias con secuencias preestablecidas reviste una complejidad superior fuera de los objetivos de este texto. Para complementar lo anteriormente dicho, la figura que se muestra a continuacin ilustra la implementacin de la emergencia en un circuito que, adems, incluye: Selectora de operacin manual/automtico, selectora de automtico a ciclo simple o continuo y pulsadores independientes de marcha y parada, segn el modo de operacin seleccionado:
<
<
INTERPRETACIN DE LOS ESQUEMAS DE MANDO
<
67
6.3.4
Mandos con actuadores mltiples Ejercitacin Ejercicio N 18 Se pretende que los actuadores neumticos A y B realicen un ciclo automtico con secuencia A+, B+, A-, B-. El inicio del ciclo se realizar por medio de un pulsador. El ciclo deber concluir aunque el pulsador se mantenga oprimido y slo podr iniciarse si fuera completado el anterior. El diagrama Espacio Fase resultar como se muestra en la figura:
68
MICRO
Ntese que para lograr las condiciones de marcha propuestas (inicio del ciclo), se ha establecido una condicin Y entre el pulsador y el fin de carrera accionado por el ltimo movimiento del ciclo. La figura muestra la solucin adoptada:
Ejercicio N 19 Dos actuadores neumticos deben realizar un ciclo automtico con secuencia A+, B+, A-, B-, con idnticas caractersticas de inicio de ciclo que las propuestas para el ejercicio N 18. El diagrama Espacio Fase se muestra a continuacin:
Obsrvese que para asegurar las condiciones de inicio de ciclo, se ha establecido una condicin Y entre el pulsador y los finales de carrera accionados por los ltimos movimientos del ciclo. Esto asegura la marcha, slo si los dos actuadores alcanzaron la posicin de reposo en el ciclo anterior, es decir, fue completado l ciclo anterior. La figura muestra una posible solucin:
<
<
<
INTERPRETACIN DE LOS ESQUEMAS DE MANDO
69
Ejercicio N 20 Dos cilindros neumticos deben operar automticamente a ciclo simple segn la secuencia A+, B+, B-, A-. El inicio de ciclo se efectuar por medio de un pulsador y slo ocurrir si fue completado el ciclo anterior, es decir, con los actuadores en posicin de reposo. El diagrama Espacio Fase para el ciclo propuesto se muestra en la siguiente figura:
Si observamos detenidamente el diagrama podremos detectar que: La seal de B2, que hace salir al cilindro B, est presente en el momento en que es emitida la seal desde B3 para hacerlo retornar. B2 est presente durante las fases 2 y 3, siendo B3 emitida al final de la fase 2. La seal A3, que hace retornar al cilindro A, estar presente cuando deba emitirse la seal de inicio que lo hace salir. A3 est presente durante las fases 4 y 1, en tanto A4 es pulsado al final de la fase 4.
70
MICRO
Las vlvulas biestables utilizadas en la gran mayora de los mandos neumticos no responden a una seal mientras tengan presente la contraria, es decir, la conmutacin de la vlvula es bloqueada por la seal contraria. El ciclo propuesto presentar dos bloqueos que impedirn su desarrollo, debido a la presencia en A1 y B1 de las seales A3 y B2 respectivamente. Las seales que por razones operativas del ciclo estn presentes cuando deban ingresar las contrarias se denominan seales bloqueantes. Para que el ciclo pueda efectuarse, stas deben ser eliminadas. En nuestro ejemplo, A3 y B2 son seales bloqueantes, las que indicaremos circuladas sobre el diagrama Espacio Fase. Los esquemas circuitales siguientes muestran distintas soluciones que permiten eliminar el bloqueo que originan dichas seales (A3 y B2). a) Tcnica del mando abatible (mando unidireccional).
Consiste en anular las seales de bloqueo mediante el uso de finales de carrera con mando unidireccional. El esquema circuital resultar como se muestra en la figura:
b) Tcnica de la temporizacin (monopulsado de seales). Consiste en anular las seales bloqueantes temporizando su duracin (monopulsado), logrando que stas desaparezcan antes que ingresen las seales contrarias. El esquema de mando ser ahora el indicado en la figura:
<
<
INTERPRETACIN DE LOS ESQUEMAS DE MANDO
<
71
c) Tcnica de la memoria auxiliar. Consiste en eliminar las seales bloqueantes; quitndole la alimentacin a los finales de carrera emisores de dichas seales, en el momento en que son emitidas las respectivas seales contrarias. Esto se logra utilizando vlvulas de memoria auxiliar biestables del tipo 3/3 5/2. El esquema siguiente muestra la solucin empleando esta tcnica con una memoria auxiliar 5/2:
72
MICRO
d) Tcnica de la cascada. Esta forma de eliminacin de seales bloqueantes es una derivacin directa de la tcnica anterior, que posibilita la enumeracin de un mtodo de diseo de circuitos llamado mtodo de la cascada. El ejercicio propuesto queda resuelto del siguiente modo, empleando una vlvula de memoria biestable 5/2:
Aclaramos que la anulacin de las seales bloqueantes es posible tambin empleando otras tcnicas tales como la del conexionado o la de los registros secuenciales paso a paso. La primera de ellas no es aplicable a todos los casos (en particular al ejercicio que nos ocupa) y requiere una experiencia previa en la tcnica de los circuitos. Una explicacin de esta tcnica es mostrada en el ejercicio N 21. La segunda, registro paso a paso, es una derivacin ms elaborada de la tcnica en cascada, que permite obtener mandos secuenciales paso a paso de alta confiabilidad. Su aplicacin es mostrada en los ejercicios N 23 y N 24. Ejercicio N 21 Los cilindros neumticos A, B y C deben operar segn la secuencia A+, B+, A-, C+, B-, C-. Las condiciones de inicio pretendidas son anlogas a las de los ejercicios anteriores. El diagrama Espacio Fase (ver siguiente figura) nos muestra dos seales de bloqueo:
<
<
INTERPRETACIN DE LOS ESQUEMAS DE MANDO
<
73
A6, que hace salir al cilindro A, est presente en A1 cuando A debe retornar; esto es cuando la seal de A3 deba ingresar a A1, por lo tanto, A6 es bloqueante C4, que hace salir al cilindro C est presente en C1 cuando C deba retornar; esto es cuando la seal de C3 deba ingresar a la vlvula C1, por lo tanto, C4 es bloqueante.
e) Tcnica del conexionado El esquema de la siguiente figura muestra la solucin del ejercicio utilizando la tcnica del conexionado. sta consiste bsicamente en lograr condiciones Y, conectando en serie los finales de carrera bloqueantes con otros que no se encuentren accionados o dejen de estarlo en el momento en que deban ingresar las seales contrarias. En nuestro caso A2C3 en serie alimentando a A4 y A3C2 de igual modo con C4. Cualquiera de las tcnicas empleadas en el ejercicio N 20 pudo tambin dar solucin al problema planteado. Ejercicio N 22
74
MICRO
Los cilindros neumticos A, B y C deben operar automticamente segn la secuencia A+, B+, B-, C+, C-, A-. El funcionamiento ser a ciclo simple con inicio mediante un pulsador y estar condicionado a la finalizacin del ciclo anterior. El diagrama Espacio Fase se muestra en la figura:
La solucin se ha logrado mediante la tcnica de la cascada, utilizando memorias auxiliares del tipo 5/2 biestables:
<
<
<
INTERPRETACIN DE LOS ESQUEMAS DE MANDO
75
La siguiente figura muestra una solucin equivalente, empleando la misma tcnica pero con memorias auxiliares 3/2 tambin biestables:
Aqu se presenta la misma solucin con otra disposicin de las memorias auxiliares:
76
MICRO
En la siguiente figura se ha adoptado otra disposicin de las memorias y se condicion el ingreso de las seales a stas mediante vlvulas Y:
Ejercicio N 23 Tres actuadores neumticos deben cumplir un ciclo de trabajo, segn la secuencia A+, B+, C+, C, B-, A-. El inicio de ciclo ser mediante un pulsador y reunir las condiciones exigidas en los ejercicios precedentes. Se detecta en el siguiente diagrama Espacio Fase la presencia de cuatro seales bloqueantes, B2, C2, B3, y A3 en razn que: B2 est presente cuandodebe ingresar B3 C2 est presente cuando debe ingresar C3 B3 est presente cuando debe ingresar B2 A3 est presente cuando debe ingresar A2
<
<
<
INTERPRETACIN DE LOS ESQUEMAS DE MANDO
77
Proponemos dos soluciones:
1. Tcnica del mando unidireccional.
2. Tcnica en cascada.
78
MICRO
Ejercicio N 24 Tres cilindros neumticos deben operar segn la siguiente secuencia: A+, C+, B+, A-, B-, C-. Se pretende un funcionamiento automtico a ciclo simple o continuo con pulsadores independientes de marcha y parada en esta ltima modalidad. Como condicin de emergencia se impone el retorno a posicin de reposo de todos los actuadores desde la fase en ejecucin. En condicin de emergencia los pulsadores de marcha normal a ciclo simple o continuo deben ser inoperantes, hasta tanto la emergencia sea relevada accionando otro pulsador. Las condiciones de inicio de ciclo son anlogas a la de los ejercicios anteriores. Diagrama Espacio Fase:
Solucin:
<
<
<
INTERPRETACIN DE LOS ESQUEMAS DE MANDO
79
Ejercicio N 25 Un dispositivo de elaboracin de piezas requiere que los cilindros neumticos A, B, y C realicen automticamente la siguiente secuencia: A+, B+, B-, A-, C+, C-. Se pretende que el equipo tenga la posibilidad de operar a eleccin en ciclo simple o continuo. Un comando de emergencia retornar los actuadores simultneamente desde la fase en ejecucin a la posicin de reposo. Los mandos de marcha no deben operar bajo estas condiciones. La emergencia deber ser relevada por medio del pulsador REM. Diagrama Espacio Fase: Proponemos tres soluciones:
1. Tcnica del mando unidireccional:
80
MICRO
2. Tcnica en cascada:
3. Registros secuenciales paso a paso:
<
<
DETECCIN DE FALLAS
<
81
Deteccin de fallas
7. 1
Deteccin sistemtica de fallas en circuitos neumticos La deteccin de fallas en los circuitos neumticos implica un proceso de razonamiento basado en el conocimiento de las caractersticas funcionales del equipo y la relacin entre los distintos componentes intervinientes en el mando. Muchas veces la tarea es asignada a personas carentes de dicho conocimiento, las que inevitablemente deben recurrir a la deteccin por tanteo. Esta a menudo no slo es infructuosa, sino que se convierte en fuente de mayores desperfectos en el mando, traducidos en aumentos de tiempos de mquina parada y cuantiosas prdidas de produccin. Por otro lado, es frecuente que el xito en la tarea de deteccin est solo reservado a determinadas personas que por su antigedad conocen todos los secretos del equipo. sta es una solucin vlida pero disponible (aunque no siempre) al cabo de varios aos y por lo tanto de costo elevado. Los inconvenientes anteriores generan la necesidad de un mtodo de trabajo que garantice la deteccin en forma sistemtica de las fallas, an con escasa experiencia sobre el equipo. El mtodo que proponemos seguidamente se basa en dos aspectos: a) Predeterminacin sobre el esquema circuital de los posibles elementos causantes de la falla. b) Verificacin posterior sobre la instalacin real. A efectos de la aplicacin del mtodo, ser imprescindible contar para cada equipo de la planta con la siguiente documentacin base: Diagrama Espacio Fase u otra forma de representacin de la secuencia operativa de la mquina. Esquema circuital del mando, con lista de materiales y designacin de elementos, segn lo establecido en los apartados anteriores. Croquis de instalacin. Esta documentacin es normalmente provista por los fabricantes de los equipos, sin embargo, no siempre est disponible, por lo que muy probablemente deba ser elaborada por el propio sector de mantenimiento. Las bases para su realizacin fueron ya establecidas en los apartados anteriores. Las personas a cargo de las reparaciones debern estar capacitadas en la: Interpretacin de diagramas de secuencia Espacio Fase, Grafcet, u otra. Lectura e interpretacin de esquemas circuitales (implica conocimiento de simbologa, formas de representacin, designacin de elementos, etc.). El sector de mantenimiento acordar con el sector de produccin los siguientes puntos bsicos: La produccin no deber introducir cambios en los mandos sin el conocimiento del sector de mantenimiento, quien frente al caso analizar los alcances y actualizar la documentacin pertinente. Los operarios de los equipos en condicin de falla no debern tomar acciones sobre el mando tendientes a normalizar el funcionamiento. Slo deben limitarse a reportar la falla a mantenimiento. Cuando la falla provoque una parada, la mquina deber quedar en lo posible en la posicin alcanzada al momento de producirse la misma.
82
MICRO
Seguidamente estableceremos el procedimiento a seguir por la persona a cargo de la tarea, a partir del momento en que la falla es reportada. 7. 2 Procedimiento para la deteccin de fallas Toda vez que una falla sea reportada, el responsable de la reparacin efectuar las siguientes preguntas: Se encuentra todava la mquina en la posicin en que surgi la falla? Fue realizada alguna accin tendiente a reanudar la marcha? A continuacin se proceder del siguiente modo:
1. Con ayuda del diagrama Espacio Fase y en funcin de la posicin alcanzada
<
por los actuadores, determine la fase en que se encuentra detenido el ciclo de trabajo.
2. Con el mismo diagrama determine las acciones que debieran continuar en la
posicin detenida.
3. Identifique en el esquema circuital los elementos que guardan relacin con
dichas acciones. El orden de probabilidad de fallas, ser:
a) Los elementos de las cadenas de mando que dan origen a las acciones determi-
b)
c) d) e)
nadas en el punto 2, designados en el esquema circuital con las letras de los actuadores, seguidas de nmeros pares o impares segn sean dichas acciones Los elementos de las cadenas de mando que dan origen a las acciones contrarias a las del punto 2. Estos pueden generar seales bloqueantes (en la vlvula) e impedir la realizacin del ciclo. Se identificarn por contraposicin con los del punto a). Las vlvulas de los actuadores. stas son las designadas con A1, B1, C1, D1, etc. Los elementos de regulacin de los actuadores: A02, A03, B02, B03, etc. Los actuadores mismos: A, B, C, D, etc.
4. Identifique los elementos mencionados en la instalacin real. Es preferible que
stos se encuentren ya rotulados en concordancia con la designacin del esquema circuital. Esto facilitar la localizacin de los mismos.
5. Inicie la verificacin en la mquina siguiendo los pasos indicados en el grfico de
la siguiente figura:
<
<
DETECCIN DE FALLAS
83
84
MICRO
7. 3
Ejercicios de deteccin de fallas Ejercitacin Ejercicio N 26 Sobre la base del ejercicio N 18, que reproduciremos seguidamente, aplicaremos el procedimiento descrito.
Supondremos que el ciclo de trabajo se interrumpi a causa de una falla. sta es reportada y de las preguntas formuladas surge que: La mquina se encuentra en la posicin de falla. No se realiz ninguna accin tendiente a normalizar el funcionamiento.
1. De la posicin de los actuadores surge que el ciclo se encuentra detenido en la
<
ltima fase (fin de ciclo).
2. La accin que debiera continuar es A+. 3. Los elementos que guardan relacin con la falla son: A2; A4; A3; A5; A7; A9;
A1; no existe; B.
4. Se identifican los elementos en la instalacin real. 5. Se procede a verificar siguiendo la secuencia indicada en el grfico de la pgina
83. Suponemos realizadas las verificaciones 1 a 6, no encontrndose ninguna anormalidad. 6. La verificacin 7 conduce a la 8 por lo que quedan excluidos de falla los elementos A2 y A4 (la verificacin 7 se realiza con A4 oprimido). El resultado de la verificacin 7 nos conduce a la 8. Esto descarta automticamente a B3 como causante de la parada. La verificacin 8 realizada sobre el piloto de B1, nos conduce a la 9. Esto excluye a B2 como elemento de falla. Obviamente la anomala se encuentra ahora exclusivamente en B1 o en B, o sus conducciones. La verificacin 9 nos conduce a la 10. Esto excluye al actuador B, llegando luego de la verificacin 10 y a la conclusin de que la vlvula B1 est trabada por suciedad en los mandos.
<
<
DETECCIN DE FALLAS
85
Ejercicio N 27 Aplicaremos el procedimiento de deteccin al ejercicio N 20, tcnica de la temporizacin. Por comodidad reproduciremos aqu el diagrama Espacio Fase y el esquema circuital correspondiente:
La falla reportada es que el ciclo no se inicia al oprimir el pulsador A4. La mquina se halla en posicin de parada normal. No se realiz ninguna accin para normalizar el funcionamiento.
1. De la posicin de los actuadores surge que el ciclo se encuentra detenido en la
ltima fase (fin de ciclo).
2. La accin que debiera continuar es A+. 3. Los elementos que guardan relacin con la falla son: A2; A4; A3; A5; A7; A9;
A1; no existe B.
4. Se identifican los elementos en la instalacin real. 5. Se procede a verificar siguiendo la secuencia indicada el grfico de la pgina 83.
Suponemos realizadas las verificaciones 1 a 6, no encontrndose ninguna anormalidad.
6. La verificacin 7 conduce a la 8 por lo que quedan excluidos de falla los ele-
mentos A2 y A4 (la verificacin 7 se realiza con A4 oprimido). La verificacin 8, realizada sobre el piloto de A1, nos conduce a que la falla se encuentra sobre los elementos b, es decir A3, A5, A7, A9. Verificando esta cadena de mando, encontramos que el regulador A5 se encuentra muy cerrado. La seal contraria en B1 est presente impidiendo la entrada proveniente de A4.
86
MICRO
Ejercicio N 28 Aplicaremos el mtodo de deteccin de fallas al ejercicio N 22, reproducido seguidamente junto con el diagrama Espacio Fase correspondiente. La mquina se encuentra detenida en la fase de falla. No se realizaron acciones tendientes a reanudar la marcha.
1. Del diagrama Espacio Fase surge que el ciclo se encuentra detenido en la fase 2. 2. La accin que contina a la posicin de falla es B-. 3. Los elementos vinculados con dicha accin son: B3 y la memoria auxiliar Z2; B2
<
y la memoria auxiliar Z1; B1; no existe; B.
4. Se identifican los elementos en la instalacin real. 5. Asumimos realizadas las verificaciones 1 a 6 sin encontrar anormalidades. 6. La verificacin 7 nos conduce a la 11. Quedan, por lo tanto, excluidos como cau-
sales de la falla los elementos B2 y la memoria auxiliar Z1. La bsqueda ahora se centrar sobre los elementos B3, Z2 y sus conducciones. Para el ejemplo propuesto, la 11 nos conduce a la 12 en razn de la presencia de Z1, Z2 y Z3, memorias auxiliares.
<
DETECCIN DE FALLAS
<
87
Conclusin La 12 nos conduce a la 13 y sta a la 16. De sta ltima verificacin surge que la falla es ocasionada por una interrupcin de la cadena de pilotaje a la vlvula auxiliar Z2 por aplastamiento de conducciones o falla de B3. Revisada esta cadena de mando se encuentra una interrupcin en la conduccin, que alimenta a B3 desde la lnea de grupo I. Solucionado el desperfecto el equipo reanuda su funcionamiento.
MICRO
<
88
Material didctico
Micro Capacitacin realiza y comercializa una variedad de elementos didcticos de gran flexibilidad, fcil montaje y re-ubicacin o cambio, con posibilidades de expansin con mdulos que permiten partir de un modelo bsico, y terminar en un poderoso centro de estudio y ensayo. Paneles serie DIDACTO Estos paneles estn enteramente diseados por MICRO en un desarrollo compartido por nuestros especialistas de Capacitacin y de Ingeniera. Los componentes que se utilizan para su construccin son los mismos que adopta la industria de todo el mundo para la implementacin de sus automatismos en una amplia gama de aplicaciones y complejidades.
Se entregan con una base de montaje en estructuras de perfiles de aluminio anodizados, y un exclusivo sistema de fijacin de elementos de ajuste manual de un cuarto de vuelta que permita su fcil re-ubicacin o cambio, facilitando la tarea didctica del capacitador y la asimilacin de conceptos de los asistentes.
En cuanto a las posibilidades de expansin, se han contemplado diferentes mdulos que permiten migrar de un modelo bsico y llegar a implementar hasta un poderoso Centro de Estudio y Ensayo que incluya PC, interfaces para accionamiento de actuadores, mobiliario, etc., cubriendo variadas tecnologas complementarias.
89
MICRO CAPACITACIN
Software
Los softwares utilizados tienen como misin amalgamar la potencialidad de la informtica aplicada a la enseanza de automatizacin. Puede clasificarse en:
1. Softwares de simulacin, que pueden disear,
ensayar y simular circuitos que incluyan componentes electrnicos, neumticos e hidrulicos. 2. Softwares de clculo, informacin tcnica y seleccin de componentes adecuados para cada requisicin tcnica. 3. Softwares de presentaciones que, preparados por nuestros ingenieros, optimizan las charlas y las adecuan al medio al que van dirigidas. Los referencia a los softwares de simulacin, y con el fin de hacerlos interactivos, se dispone de interfaces que permiten fsicamente hacer actuar a los elementos que son visualizados en el monitor de la computadora. Material de soporte Micro Capacitacin dispone de variados elementos didcticos para facilitar la transmisin efectiva de los conceptos. Entre ellos se cuenta con componentes en corte, simbologa para pizarra magntica, manuales, videos, transparencias, etc.
Cursos Micro Capacitacin cubre un extenso rango de temarios en los cursos que dicta en sus aulas que, para tal efecto, posee en su edificio central. Pero tambin atiende los requerimientos de la Industria y las instituciones educativas trasladndose con su laboratorio mvil a las ciudades del interior, y otros pases.
<
You might also like
- Mantenimiento preventivo de sistemas de automatización industrial. ELEM0311From EverandMantenimiento preventivo de sistemas de automatización industrial. ELEM0311Rating: 4.5 out of 5 stars4.5/5 (2)
- Manual de Controlador Lógico Programable (PLC)Document84 pagesManual de Controlador Lógico Programable (PLC)J Ferreyra Libano75% (4)
- Manual Automatización Electroneumática IndustrialDocument92 pagesManual Automatización Electroneumática IndustrialJ Ferreyra Libano100% (2)
- 031 Mantenimiento de Instalaciones y Sistemas NeumaticosDocument76 pages031 Mantenimiento de Instalaciones y Sistemas NeumaticosJiovanni Montoya75% (4)
- Mantenimiento de Cilindros NeumaticosDocument62 pagesMantenimiento de Cilindros NeumaticosJ Ferreyra Libano100% (5)
- Mantenimiento de FRLDocument117 pagesMantenimiento de FRLJ Ferreyra Libano100% (4)
- Manual de Mantenimiento Equipos de Neumatica e HidraulicaDocument63 pagesManual de Mantenimiento Equipos de Neumatica e HidraulicaMimi Flores Salazar50% (4)
- UF1965 - Operaciones auxiliares en el mantenimiento de equipos eléctricosFrom EverandUF1965 - Operaciones auxiliares en el mantenimiento de equipos eléctricosNo ratings yet
- Simbologia NeumaticaDocument17 pagesSimbologia Neumaticavinchi53No ratings yet
- Mantenimiento de ValvulasDocument249 pagesMantenimiento de ValvulasJ Ferreyra Libano100% (2)
- Mandos neumaticos-MINDEF 1336 PDFDocument147 pagesMandos neumaticos-MINDEF 1336 PDFJoseph Zamalloa100% (1)
- Instructivo de Instalacion Bombas Sentinel CentrifugasDocument10 pagesInstructivo de Instalacion Bombas Sentinel CentrifugasAlfredo Hernandez VegaNo ratings yet
- Curso NeumaticaDocument333 pagesCurso NeumaticaDiego Trinidad100% (53)
- Neumatica PDFDocument33 pagesNeumatica PDFvelero100% (13)
- Taller de Electrofluimatica 2014Document70 pagesTaller de Electrofluimatica 2014Ricardo Zayas100% (2)
- Vol. 3 Neumática - Manual de Estudio Nivel BásicoDocument235 pagesVol. 3 Neumática - Manual de Estudio Nivel BásicoCarlos Iván Rueda100% (2)
- Plan de MantenimientoDocument11 pagesPlan de MantenimientoBastian Venegas PerezNo ratings yet
- Sistemas Neumaticos IndustrialesDocument79 pagesSistemas Neumaticos Industrialespablitohashimoto_54282100% (12)
- Actuadores NeumaticosDocument49 pagesActuadores Neumaticosjuan43797% (38)
- Presentación - Montaje Operacion y Mantenimiento de Motorreductores PDFDocument22 pagesPresentación - Montaje Operacion y Mantenimiento de Motorreductores PDFAnibal Aldava CrispinNo ratings yet
- Instructivo - Mantenimiento de Motores ElectricosDocument4 pagesInstructivo - Mantenimiento de Motores ElectricosJacques Lopez OrtegaNo ratings yet
- Símbologia ElectrohidráulicaDocument12 pagesSímbologia ElectrohidráulicaRodrigo Robles50% (2)
- Practicas ElectroHidraulica Festo PDFDocument10 pagesPracticas ElectroHidraulica Festo PDFFernando Sánchez RomeroNo ratings yet
- Control Secuencial de Procesos (AP-IsP)Document4 pagesControl Secuencial de Procesos (AP-IsP)Lalo FrancoNo ratings yet
- Libro de Neumatica PDFDocument340 pagesLibro de Neumatica PDFJuan Carlos Montes Castilla100% (4)
- Aplicaciones de La NeumáticaDocument115 pagesAplicaciones de La NeumáticaRogelio Flores100% (9)
- Mantenimiento de Cilindros NeumaticosDocument5 pagesMantenimiento de Cilindros Neumaticosxapoyvero100% (1)
- Manual de Hidraulica IndustrialDocument112 pagesManual de Hidraulica IndustrialJ Ferreyra Libano100% (12)
- Fichas A Neumatica FPneumaTICs 1516.2 PDFDocument7 pagesFichas A Neumatica FPneumaTICs 1516.2 PDFLuis Guzman100% (1)
- Alineamiento de Bombas PDFDocument12 pagesAlineamiento de Bombas PDFDavidGarciaCh0% (1)
- Manual de Mantenimiento A Motores Eléctricos PDFDocument21 pagesManual de Mantenimiento A Motores Eléctricos PDFharryhdzb50% (4)
- FestoDocument266 pagesFestoGabriel DionicioNo ratings yet
- Manual de Automation StudioDocument47 pagesManual de Automation StudioMauricio Guzman80% (5)
- Introduccion A La Neumatica PDFDocument156 pagesIntroduccion A La Neumatica PDFWANKEL25No ratings yet
- Diseño de Circuitos Secuenciales Electroneumaticos CableadosDocument38 pagesDiseño de Circuitos Secuenciales Electroneumaticos CableadosantornioNo ratings yet
- Sistema Neumático PDFDocument10 pagesSistema Neumático PDFyarilys indira montalvo perezNo ratings yet
- 4º Manual de Deteccion de Fallas en Circuitos NeumaticosDocument87 pages4º Manual de Deteccion de Fallas en Circuitos NeumaticosRobert Wagner100% (1)
- Apunte Electroneumatica Micro 051Document92 pagesApunte Electroneumatica Micro 051Agustin ComeglioNo ratings yet
- Automatizacion ElectroneumaticaDocument92 pagesAutomatizacion ElectroneumaticaThiago RinconNo ratings yet
- Control de ProcesosDocument11 pagesControl de ProcesosMiguel DominguezNo ratings yet
- Procesos auxiliares de fabricación en el mecanizado por corte y conformado. FMEH0209From EverandProcesos auxiliares de fabricación en el mecanizado por corte y conformado. FMEH0209No ratings yet
- Instalación de equipos y elementos de sistemas de automatización industrial. ELEM0311From EverandInstalación de equipos y elementos de sistemas de automatización industrial. ELEM0311Rating: 2 out of 5 stars2/5 (1)
- Controlporcontactos 140307212143 Phpapp01Document96 pagesControlporcontactos 140307212143 Phpapp01José Juber BalanNo ratings yet
- Procesos auxiliares de fabricación en el mecanizado por arranque de viruta. FMEH0109From EverandProcesos auxiliares de fabricación en el mecanizado por arranque de viruta. FMEH0109No ratings yet
- Implementación Del Sistema de ControlDocument4 pagesImplementación Del Sistema de ControlALVARO FABRICIO SANCHEZ CAIZANo ratings yet
- Respuesta Rio PLC 1 A 62Document33 pagesRespuesta Rio PLC 1 A 62wilmanguerra100% (2)
- MetodologíaDocument7 pagesMetodologíaMIGUEL ANGEL AMBRIZHERNANDEZNo ratings yet
- Entregable CursoDocument11 pagesEntregable CursofranzurpeNo ratings yet
- Ajuste, puesta en marcha y regulación de los sistemas mecánicos. FMEE0208From EverandAjuste, puesta en marcha y regulación de los sistemas mecánicos. FMEE0208Rating: 4 out of 5 stars4/5 (1)
- Manual PLC BásicoDocument85 pagesManual PLC Básicoinfamkon100% (2)
- Puesta en marcha de sistemas de automatización industrial. ELEM0311From EverandPuesta en marcha de sistemas de automatización industrial. ELEM0311Rating: 3 out of 5 stars3/5 (1)
- Pirámide de Automatización PDFDocument8 pagesPirámide de Automatización PDFAndres Felipe Leal GarciaNo ratings yet
- Tr1 Diagnostico y Reparacion TRABAJO FINALDocument19 pagesTr1 Diagnostico y Reparacion TRABAJO FINALJEFFERSON MENDOZA MELGAREJONo ratings yet
- SCADADocument65 pagesSCADABrayan MisaelNo ratings yet
- TX-tip-0005 MP PLC BasicoDocument100 pagesTX-tip-0005 MP PLC BasicoMiguel Angel Trinidad MartinezNo ratings yet
- AP - 5 - Introduccion A Los Sistemas de AutomatizacionDocument6 pagesAP - 5 - Introduccion A Los Sistemas de AutomatizacionAlexander KievfNo ratings yet
- Edición 18 de PucaráDocument88 pagesEdición 18 de PucaráJose A. HerreraNo ratings yet
- PUCARÁ Revista - 13Document88 pagesPUCARÁ Revista - 13Ricardo Lopez50% (2)
- Revista Pucara Nro 03Document86 pagesRevista Pucara Nro 03J Ferreyra LibanoNo ratings yet
- Revista 10Document88 pagesRevista 10Daniel EspinozaNo ratings yet
- Revista Pucara Nro 07Document88 pagesRevista Pucara Nro 07J Ferreyra LibanoNo ratings yet
- Revista Pucara Nro 15Document88 pagesRevista Pucara Nro 15J Ferreyra LibanoNo ratings yet
- Finamac Catalogo de MaquinasDocument9 pagesFinamac Catalogo de MaquinasJ Ferreyra LibanoNo ratings yet
- Revista Pucara Nro 01Document84 pagesRevista Pucara Nro 01J Ferreyra LibanoNo ratings yet
- Revista Pucara Nro 09Document88 pagesRevista Pucara Nro 09J Ferreyra LibanoNo ratings yet
- Revista Pucara Nro11Document88 pagesRevista Pucara Nro11J Ferreyra LibanoNo ratings yet
- Revista Pucara Nro 05Document86 pagesRevista Pucara Nro 05J Ferreyra LibanoNo ratings yet
- Revista Pucara Nro 20Document88 pagesRevista Pucara Nro 20J Ferreyra LibanoNo ratings yet
- PUCARÁ Revista - 6Document86 pagesPUCARÁ Revista - 6Ricardo Lopez50% (2)
- Revista Pucara Nro 21Document88 pagesRevista Pucara Nro 21J Ferreyra LibanoNo ratings yet
- Mec Ejecución y Procesos de Mecanizado, Conformado y MontajeDocument540 pagesMec Ejecución y Procesos de Mecanizado, Conformado y Montajemariogzdulcey93% (46)
- Revista Pucara 17Document88 pagesRevista Pucara 17Jose A. HerreraNo ratings yet
- Fremont-Barnes G. Las Malvinas 1982. Operaciones Terrestres en El Atlántico Sur.Document149 pagesFremont-Barnes G. Las Malvinas 1982. Operaciones Terrestres en El Atlántico Sur.J Ferreyra Libano100% (3)
- (Dare A. Wells Harold S. Slusher) Física para in (B-Ok - CC) PDFDocument399 pages(Dare A. Wells Harold S. Slusher) Física para in (B-Ok - CC) PDFJunior Castellanos Acuña100% (2)
- 6112 ES TCM 42-113427Document108 pages6112 ES TCM 42-113427noregisteredNo ratings yet
- Revista Pucara Nro 16Document88 pagesRevista Pucara Nro 16J Ferreyra LibanoNo ratings yet
- Resistencia Solucionario SingerDocument145 pagesResistencia Solucionario SingerThe love fire89% (201)
- Mecanica de Fluidos Ejercicios Oscar Miranda UniDocument182 pagesMecanica de Fluidos Ejercicios Oscar Miranda Unijuanchofercho2090% (30)
- El ABC de Las Instalaciones Eléctricas Industriales (2da Ed.)Document524 pagesEl ABC de Las Instalaciones Eléctricas Industriales (2da Ed.)J Ferreyra Libano100% (17)
- Automatismos Neumaticos e HidraulicosDocument258 pagesAutomatismos Neumaticos e HidraulicosJ Ferreyra Libano81% (16)
- Ventiladores Centrifugos-AltecoDocument28 pagesVentiladores Centrifugos-AltecoJ Ferreyra LibanoNo ratings yet
- Catalogo Bipress WebDocument45 pagesCatalogo Bipress WebJ Ferreyra LibanoNo ratings yet
- Tornimatic - Catalogo de PinzasDocument33 pagesTornimatic - Catalogo de PinzasJ Ferreyra Libano100% (2)
- 0901d1968097689a Rolling Bearings - 17000 - 1 ES - TCM - 42 121486 PDFDocument1,152 pages0901d1968097689a Rolling Bearings - 17000 - 1 ES - TCM - 42 121486 PDFadolfo lalalaNo ratings yet
- Fap Catalogo WebDocument14 pagesFap Catalogo WebGonza Reyes CastilloNo ratings yet
- Catalogo ParkerDocument482 pagesCatalogo ParkerExequiel ParraNo ratings yet
- Catálogo Plumas Limpiaparabrisas 2020 - WebDocument75 pagesCatálogo Plumas Limpiaparabrisas 2020 - WebCarlos Lopez OsalNo ratings yet
- Pts Con Maquinaria PesadaDocument12 pagesPts Con Maquinaria PesadaJuan Pablo Araya LópezNo ratings yet
- Tutorial Arreglo Carbu Rad or MikuniDocument19 pagesTutorial Arreglo Carbu Rad or Mikunijokoke100% (1)
- Cuaderno de InformesDocument11 pagesCuaderno de Informesfrancisco iman sosaNo ratings yet
- La Ingeniería de Hoy en DiaDocument2 pagesLa Ingeniería de Hoy en DiaLauraGabrielaSuárezVallejo100% (1)
- Taller 1Document2 pagesTaller 1EL RINCON DEL ESTUDIANTE100% (3)
- Indicadores y Medidores c9.3bDocument5 pagesIndicadores y Medidores c9.3bYismara MuñozNo ratings yet
- Camion Volquete FMX440Document37 pagesCamion Volquete FMX440Lidia ZlaNo ratings yet
- Tipos de Sistema de ControlDocument8 pagesTipos de Sistema de ControlCristian Arturo SamudioNo ratings yet
- TareaDocument8 pagesTareaMichael VargasNo ratings yet
- 37 - Motor WankelDocument20 pages37 - Motor WankelPablo Martin CadenaNo ratings yet
- Torre de Enfriamiento Especificaciones TecnicasDocument18 pagesTorre de Enfriamiento Especificaciones TecnicasMariana Castillo MolinaNo ratings yet
- Tipo de Motores - LenzeDocument151 pagesTipo de Motores - LenzeCURSOS LINTINo ratings yet
- Shell Tonna S3 MDocument2 pagesShell Tonna S3 MjuanNo ratings yet
- 01 Manual Servicio TVS 100 Sport ELS - KLS 13-01-2021Document27 pages01 Manual Servicio TVS 100 Sport ELS - KLS 13-01-2021Andrex Feliphe Henao100% (2)
- Cinematica Fisica MecanicaDocument5 pagesCinematica Fisica MecanicanicolasNo ratings yet
- Esquema Eléctrico Dirección VW Golf VDocument6 pagesEsquema Eléctrico Dirección VW Golf VBenjamin SanchezNo ratings yet
- Mecanica de Motor..Document25 pagesMecanica de Motor..rodrigoNo ratings yet
- Procedimiento de Uso de Montacargas JorgeDocument5 pagesProcedimiento de Uso de Montacargas JorgeJorge Ticante100% (1)
- TERM Reciprocos 2005 CuestionarioDocument20 pagesTERM Reciprocos 2005 CuestionarioDAVID SANTIAGO PRECIADO SANABRIANo ratings yet
- Constancia de Verificacion de Pesos y Medidas-2Document1 pageConstancia de Verificacion de Pesos y Medidas-2KAREN SALAZAR DAVILANo ratings yet
- Arocs 3340 6X4 4500 PSDocument2 pagesArocs 3340 6X4 4500 PSjia percyNo ratings yet
- Renault Interfase Nueva UsbDocument16 pagesRenault Interfase Nueva UsbJosé SegoviaNo ratings yet
- Ficha Tecnica 22Document2 pagesFicha Tecnica 22dani9acosta-5No ratings yet
- Carta de PresentaciónDocument3 pagesCarta de PresentaciónCristina OrtegaNo ratings yet
- Motor Sincrno de Imanes PermanentesDocument8 pagesMotor Sincrno de Imanes PermanentesJuan Salvador CastañedaNo ratings yet
- Check List CamionetaDocument1 pageCheck List CamionetaJuan Aguilar Quispe100% (1)
- El Uso de Las Tildes.Document3 pagesEl Uso de Las Tildes.Տaɭɩմŋ ʍɩŋ.No ratings yet
- Folleto Hipertension ArterialDocument2 pagesFolleto Hipertension ArterialShirley Villalba LopezNo ratings yet
- Seat ToledoDocument264 pagesSeat ToledoMau AlvarezNo ratings yet