You might also like
- Belt Conveyor BookDocument14 pagesBelt Conveyor BookchekuswekuNo ratings yet
- Design of Machine Elements: (Project Based Lab) Design Project:1 Belt DrivesDocument25 pagesDesign of Machine Elements: (Project Based Lab) Design Project:1 Belt DrivesSurajNo ratings yet
- Ch4 Belt Drives-2Document40 pagesCh4 Belt Drives-2Abaziz Mousa OutlawZzNo ratings yet
- Rack and Pinion CalculationDocument8 pagesRack and Pinion CalculationhendrobamaNo ratings yet
- Roller Screw BasicsDocument3 pagesRoller Screw BasicskiranNo ratings yet
- Design of Flat Belt DriveDocument18 pagesDesign of Flat Belt DriveSaravanan Kumar50% (2)
- Rohm Lathe ChucksDocument91 pagesRohm Lathe ChucksNebojša ObradovićNo ratings yet
- Voith Fluid Couplings Constant FillDocument14 pagesVoith Fluid Couplings Constant Fillmanoj983100% (1)
- Belt DrivesDocument17 pagesBelt DrivesAbebe AyingdaNo ratings yet
- Load Testing of GearboxesDocument4 pagesLoad Testing of Gearboxesvijaykumarn100% (1)
- Feeder TypesDocument54 pagesFeeder Types1977julNo ratings yet
- Technical Reference OverviewDocument17 pagesTechnical Reference OverviewHery Vázquez JiménezNo ratings yet
- Sprocket Engineering DataDocument32 pagesSprocket Engineering DataCesar Dominguez ParedesNo ratings yet
- GearsDocument51 pagesGearsKasi Visweswar Rao100% (1)
- Imososa Mining Company Crushing Plant ReportDocument14 pagesImososa Mining Company Crushing Plant ReportTawanda NyambiyaNo ratings yet
- Roller Chains - ENGDocument122 pagesRoller Chains - ENGPok Jak SallehNo ratings yet
- POWER TRANSMISSION SYSTEMSDocument16 pagesPOWER TRANSMISSION SYSTEMSVasudev Gupta100% (1)
- Selection Calculations For Motors PDFDocument17 pagesSelection Calculations For Motors PDFbibhansuNo ratings yet
- Pneumatic FeedingDocument113 pagesPneumatic Feedingragdapattice0% (1)
- Types of Gear BoxDocument5 pagesTypes of Gear BoxHoda HosnyNo ratings yet
- The Design of Conveyor PulleysDocument10 pagesThe Design of Conveyor PulleysJam BabNo ratings yet
- Calculations For Gear Box Selection For 7Document3 pagesCalculations For Gear Box Selection For 7Jiten Kumar BiswalNo ratings yet
- Lecture 16 - Worm Gears Worked Out ProblemsDocument19 pagesLecture 16 - Worm Gears Worked Out ProblemsApurba haldar50% (2)
- Rack and PinionDocument16 pagesRack and PinionjeronimoisraelNo ratings yet
- Worm GearsDocument27 pagesWorm GearsDipakNo ratings yet
- Motor Calculations PDFDocument8 pagesMotor Calculations PDFheroNo ratings yet
- MCS-Modular Conveyor System PDFDocument87 pagesMCS-Modular Conveyor System PDFJuan Manuel LaraNo ratings yet
- Drive Formulae - LENZE The Compact Formula CollectionDocument108 pagesDrive Formulae - LENZE The Compact Formula Collectionhiloactive100% (1)
- SewDocument396 pagesSewVarun SanganiNo ratings yet
- Design GuideDocument68 pagesDesign GuiderdsrajNo ratings yet
- Basics of Belt DrivesDocument12 pagesBasics of Belt DrivesSrinivasan RaviNo ratings yet
- Control Apron Feeder RatesDocument4 pagesControl Apron Feeder RatesNarsi ReddyNo ratings yet
- Rev1 Sew Gear MotorDocument248 pagesRev1 Sew Gear MotorWirote DewilaiNo ratings yet
- A. Basic Concepts 1.0 Velocities in Gear TrainsDocument76 pagesA. Basic Concepts 1.0 Velocities in Gear TrainsLuis Balducci80% (5)
- Moog-Ball Screws Planetary Roller Screws-DatasheetDocument2 pagesMoog-Ball Screws Planetary Roller Screws-DatasheetvaneaNo ratings yet
- Shaft DesignDocument7 pagesShaft DesignRafael ReyesNo ratings yet
- E - 7403-9000 - Table of ContentsDocument4 pagesE - 7403-9000 - Table of Contentsraobabar21No ratings yet
- Conveyor ChainsDocument184 pagesConveyor ChainsAchinNo ratings yet
- Electric MotorDocument23 pagesElectric MotorArashdeep Singh100% (1)
- AC MotorsDocument52 pagesAC Motorsjennybunnyomg50% (6)
- Electrical MotorsDocument53 pagesElectrical MotorsSuda KrishnarjunaraoNo ratings yet
- Kaizen - Motor Selection GuideDocument11 pagesKaizen - Motor Selection GuideAmory Sabri AsmaroNo ratings yet
- Kaizen - Motor Selection GuideDocument10 pagesKaizen - Motor Selection GuideKarrar HussainNo ratings yet
- Electric Vehicle Types ExplainedDocument15 pagesElectric Vehicle Types ExplainedAnshul YadavNo ratings yet
- Synchronous Machine: Both Air Gap Field and Rotor Rotate at Synchronous Speed Doubly-Excited Machine - Unique FeatureDocument24 pagesSynchronous Machine: Both Air Gap Field and Rotor Rotate at Synchronous Speed Doubly-Excited Machine - Unique FeatureAstitva PriyadarshiNo ratings yet
- Fundamentals of Electrical Drives SystemsDocument14 pagesFundamentals of Electrical Drives SystemsyaredNo ratings yet
- DC Motor Speed System Modeling (Final Report)Document41 pagesDC Motor Speed System Modeling (Final Report)Khubaib Ahmed80% (5)
- Actuators-Unit 1 & Sensor Unit 2Document123 pagesActuators-Unit 1 & Sensor Unit 2viren mallyaNo ratings yet
- Types of Motor Motor TypesDocument17 pagesTypes of Motor Motor TypesGokulThalaNo ratings yet
- Electric MotorDocument16 pagesElectric MotorAnsari HuzefaNo ratings yet
- Construction and Working of Brushless DC PDFDocument12 pagesConstruction and Working of Brushless DC PDFaswardi8756No ratings yet
- BDLC MotorDocument8 pagesBDLC MotorArun VijayNo ratings yet
- Ac MotorsDocument12 pagesAc MotorsSUNDAR THANGAPANDINo ratings yet
- AC Drives MSc2016Document21 pagesAC Drives MSc2016Mohamed Elsaid El ShallNo ratings yet
- 8 AktuatorDocument45 pages8 Aktuatormur tazaNo ratings yet
- Lab Rep 2Document5 pagesLab Rep 2Kent Orriele FadriquelNo ratings yet
- AC and DC Motor Drives ExplainedDocument24 pagesAC and DC Motor Drives ExplainedNilanjan PodderNo ratings yet
- Types of MotorsDocument12 pagesTypes of MotorsMatin Inamdar100% (1)
- Power Electronics and EDDocument45 pagesPower Electronics and EDtefe yabatuNo ratings yet
- BeamsDocument37 pagesBeamsGohar GujjarNo ratings yet
- Lect 4 Equilibrium FBDDocument33 pagesLect 4 Equilibrium FBDAbdul RahmanNo ratings yet
- Bearing FinalDocument47 pagesBearing FinalGohar Gujjar100% (1)
- Lect 5 Moments CouplesDocument37 pagesLect 5 Moments CouplesAbdul RahmanNo ratings yet
- ECAD IsometricdrawingexerciseDocument12 pagesECAD IsometricdrawingexerciseAbdul RahmanNo ratings yet
- Lect 3 Force AnalysisDocument117 pagesLect 3 Force AnalysisAbdul RahmanNo ratings yet
- Intro GeneralDocument142 pagesIntro GeneralGohar GujjarNo ratings yet
- Lect-2-Intro To Basic Physical Quatities & UnitDocument48 pagesLect-2-Intro To Basic Physical Quatities & UnitAbdul RahmanNo ratings yet
- ECAD-Views To IsometricDocument24 pagesECAD-Views To IsometricAbdul RahmanNo ratings yet
- Orthographic ProjectionDocument13 pagesOrthographic ProjectionGohar GujjarNo ratings yet
- ECAD-Isometric To ViewsDocument26 pagesECAD-Isometric To ViewsAbdul RahmanNo ratings yet
- Manual de Autocad BasicoDocument17 pagesManual de Autocad Basicoinfected521No ratings yet
- Autocad NotesDocument53 pagesAutocad Notesadnan100% (7)
- Man Minieis EngDocument40 pagesMan Minieis EngFrequent Flyer100% (1)
- Electronic PackagingDocument54 pagesElectronic PackagingAdelle Lyn Carlos100% (1)
- Networking Straight-Through and Cross OverDocument25 pagesNetworking Straight-Through and Cross OverJan GolimanNo ratings yet
- VaristorDocument1 pageVaristordmajeedNo ratings yet
- RENR7948 C9 Industriel PDFDocument2 pagesRENR7948 C9 Industriel PDFait mimouneNo ratings yet
- EMA24AL AE InstallDocument2 pagesEMA24AL AE InstallzeljkoNo ratings yet
- Starter Pinion TestDocument2 pagesStarter Pinion TestbejoythomasNo ratings yet
- Comparison GG Am Fuses EnuDocument2 pagesComparison GG Am Fuses EnuNaveed RabbaniNo ratings yet
- Variable Speed Drives: Combinations For Customer AssemblyDocument10 pagesVariable Speed Drives: Combinations For Customer AssemblyAhmedNo ratings yet
- Sample CellsDocument3 pagesSample CellsMohammad R ChandanNo ratings yet
- 70L02GHDocument8 pages70L02GHJtzabalaNo ratings yet
- Manual Punto A Punto mp2851Document15 pagesManual Punto A Punto mp2851JorgeMarioOteroVega100% (1)
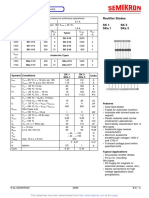
- Rectifier Diodes Sk1 Sk3 Ska 1 Ska 3: Types Types SK 1/10 SK 1/12 SK 1/14 SK 1/16 SK 3/10 SK 3/12 SK 3/14 SK 3/16Document4 pagesRectifier Diodes Sk1 Sk3 Ska 1 Ska 3: Types Types SK 1/10 SK 1/12 SK 1/14 SK 1/16 SK 3/10 SK 3/12 SK 3/14 SK 3/16jorgeNo ratings yet
- Robotic Inspection Vehicle: In-Situ Inspection For Rotating MachinesDocument2 pagesRobotic Inspection Vehicle: In-Situ Inspection For Rotating MachinesLeandro AriasNo ratings yet
- Speedo SchematicDocument1 pageSpeedo SchematicAgung Santoso Widhiami100% (2)
- 2CDC110004C0210 CM Range PDFDocument130 pages2CDC110004C0210 CM Range PDFSalvador FayssalNo ratings yet
- Parametric Tests For SemiconductorDocument25 pagesParametric Tests For SemiconductorAnonymous jByA78No ratings yet
- World Class Power Solutions RectifiersDocument8 pagesWorld Class Power Solutions RectifiersAsim KaleemNo ratings yet
- DR Tierra #QTN1Document1 pageDR Tierra #QTN1theodelarocaNo ratings yet
- 181 1531-Lza7016001 1uen AsDocument46 pages181 1531-Lza7016001 1uen AsGhizlane MounjimNo ratings yet
- The 4 Types of Ignition System and How They Work: Driving TipsDocument63 pagesThe 4 Types of Ignition System and How They Work: Driving TipsJoyce BamwendaNo ratings yet
- FR-BU2-1.5K To 55K FR-BU2-H7.5K To H280K: Inverter Instruction ManualDocument71 pagesFR-BU2-1.5K To 55K FR-BU2-H7.5K To H280K: Inverter Instruction ManualFabian MogroNo ratings yet
- Schmitt Trigger Circuit OperationDocument3 pagesSchmitt Trigger Circuit OperationHaja FarookNo ratings yet
- Pw6 Three Phase System v1Document6 pagesPw6 Three Phase System v1Hairul Anuar MasrolNo ratings yet
- B.Tech. III Year I Semester Regular / Supplementary Examinations, Nov/Dec, 2018Document2 pagesB.Tech. III Year I Semester Regular / Supplementary Examinations, Nov/Dec, 2018Namaswini SureshNo ratings yet
- Year Wise Previous Ecet Bits: (APECET-2015)Document3 pagesYear Wise Previous Ecet Bits: (APECET-2015)satyaNo ratings yet
- Havells IndustrialSwitchgearDocument48 pagesHavells IndustrialSwitchgearpramanNo ratings yet
- Introduction To Instrument TransformersDocument6 pagesIntroduction To Instrument Transformersadi nugrohoNo ratings yet
- Nirafon PLC RDocument54 pagesNirafon PLC RThịnh Khổng TrườngNo ratings yet
- S85FozmulaCapacitanceCoolantLevelSwitchData8 6-19R1Document1 pageS85FozmulaCapacitanceCoolantLevelSwitchData8 6-19R1Luis JesusNo ratings yet