You might also like
- Control Systems Unit-2 Time Response Analysis: Ms. P. Geethanjali Asst. Professor (SR) SelectDocument157 pagesControl Systems Unit-2 Time Response Analysis: Ms. P. Geethanjali Asst. Professor (SR) SelectVijay IndukuriNo ratings yet
- Time Response AnalysisDocument151 pagesTime Response AnalysisTushar GuptaNo ratings yet
- Dynamic Charactorstics of An InstrumentsDocument30 pagesDynamic Charactorstics of An InstrumentsDhinakaran VeemanNo ratings yet
- Chapter 2.2 Response Ist Order SystemsDocument30 pagesChapter 2.2 Response Ist Order SystemsSyed AliNo ratings yet
- Dynamic Characteristics: Input Signal X (T) Output Signal y (T)Document29 pagesDynamic Characteristics: Input Signal X (T) Output Signal y (T)veenadivyakishNo ratings yet
- Lecture 22-23-24 Time Domain Analysis of 2nd Order SystemsDocument73 pagesLecture 22-23-24 Time Domain Analysis of 2nd Order SystemsPradeep Kumar Mehta100% (1)
- Vibrations in Engineering: Faculty of Civil Engineering and Applied MechanicsDocument133 pagesVibrations in Engineering: Faculty of Civil Engineering and Applied Mechanicsvuhoangdai90No ratings yet
- FOPDT Model CharacterizationDocument6 pagesFOPDT Model CharacterizationHugo EGNo ratings yet
- Ch-5 Time Res WebpageDocument48 pagesCh-5 Time Res WebpageTushar GuptaNo ratings yet
- A Digital-Based Optimal AVR Design of Synchronous Generator Exciter Using LQR TechniqueDocument13 pagesA Digital-Based Optimal AVR Design of Synchronous Generator Exciter Using LQR Technique3KaiserENo ratings yet
- Project MatlabDocument10 pagesProject MatlabAbdullahNo ratings yet
- Chapter 2Document31 pagesChapter 2Endalk SimegnNo ratings yet
- Differential Equations Solving For Impulse Response: D y DT + 5 Dy DT + 6y F (T)Document13 pagesDifferential Equations Solving For Impulse Response: D y DT + 5 Dy DT + 6y F (T)love_accNo ratings yet
- Experiment 1Document5 pagesExperiment 1HarshaPuttaguntaNo ratings yet
- MAE653 Sp10 Lesson06Document9 pagesMAE653 Sp10 Lesson06Edwin MachacaNo ratings yet
- The Zero-State Response Sums of InputsDocument4 pagesThe Zero-State Response Sums of Inputsbaruaeee100% (1)
- Matlab Differentiation Matrix SuiteDocument55 pagesMatlab Differentiation Matrix SuiteRaghav VenkatNo ratings yet
- Practical Class Two Matlab PracticalDocument6 pagesPractical Class Two Matlab PracticalPradyumnaSadgirNo ratings yet
- Continuous-Time Signals and SystemsDocument37 pagesContinuous-Time Signals and SystemsJoseph IbrahimNo ratings yet
- Solution To Homework Assignment 3Document2 pagesSolution To Homework Assignment 3Jackie DuanNo ratings yet
- LQRDocument5 pagesLQRdrjoshreeNo ratings yet
- Modeling in The Time Domain: Omisol and TarifeDocument28 pagesModeling in The Time Domain: Omisol and TarifeRovick Tarife0% (1)
- Modern Control Systems (MCS) : Lecture-30-31 Design of Control Systems in Sate SpaceDocument42 pagesModern Control Systems (MCS) : Lecture-30-31 Design of Control Systems in Sate SpaceBelayneh Tadesse100% (1)
- STAT515 S19 Final ReviewproblemssolutionsDocument13 pagesSTAT515 S19 Final ReviewproblemssolutionsElias BeyeneNo ratings yet
- Chapter 3 - MatlabDocument59 pagesChapter 3 - MatlabZe SaNo ratings yet
- Report - Self Balancing BicycleDocument18 pagesReport - Self Balancing BicycleAniket PaithaneNo ratings yet
- Project:: Aditya Singh Vishnu Mhalaskar Akash Patil Deepak MauryaDocument21 pagesProject:: Aditya Singh Vishnu Mhalaskar Akash Patil Deepak MauryaBabbu MehraNo ratings yet
- Indirect Adaptive ControlDocument24 pagesIndirect Adaptive Controlhondo tinemi dNo ratings yet
- Numerical Solution of Initial Value ProblemsDocument17 pagesNumerical Solution of Initial Value ProblemslambdaStudent_eplNo ratings yet
- 18 Adaptive ControlDocument7 pages18 Adaptive ControlFathi MusaNo ratings yet
- Adaptive Control 2Document30 pagesAdaptive Control 2kanchiNo ratings yet
- SolutionsDocument66 pagesSolutionsEduardo Paulini VillanuevaNo ratings yet
- 2015 Dynamic Modelling of A One Stage Spur Gear System and Vibration Based Tooth Crack Detection Analysis MohammedDocument13 pages2015 Dynamic Modelling of A One Stage Spur Gear System and Vibration Based Tooth Crack Detection Analysis MohammedPradeep Kumar MehtaNo ratings yet
- Study of Forced Double PendulumsDocument17 pagesStudy of Forced Double PendulumsrizkibiznizNo ratings yet
- Summary of MATLAB CommandsDocument3 pagesSummary of MATLAB CommandsQuazar001No ratings yet
- Linear System TheoryDocument62 pagesLinear System TheoryadhomeworkNo ratings yet
- 1980 - Global Stability of Parameter-Adaptive Control SystemsDocument7 pages1980 - Global Stability of Parameter-Adaptive Control SystemsademargcjuniorNo ratings yet
- Advanced Control, Lecture 2,3, Modeling and LinearizationDocument48 pagesAdvanced Control, Lecture 2,3, Modeling and LinearizationsepehrNo ratings yet
- Files 2-Chapters 10 5 Transient Response SpecificationsDocument9 pagesFiles 2-Chapters 10 5 Transient Response SpecificationsYalemwork YargalNo ratings yet
- DynamicsDocument31 pagesDynamicsNagamani RajeshNo ratings yet
- B - Lecture6 Time-Domain Specifications Automatic Control SystemDocument18 pagesB - Lecture6 Time-Domain Specifications Automatic Control SystemAbaziz Mousa OutlawZzNo ratings yet
- Adaptive ControlDocument26 pagesAdaptive ControlKiran RavyNo ratings yet
- Probability Problems and SolutionsDocument3 pagesProbability Problems and SolutionsWoof Dawgmann0% (1)
- Signals & Systems B38SA 2018: Chapter 2 Assignment Question 1 - Theory - 10 MarksDocument6 pagesSignals & Systems B38SA 2018: Chapter 2 Assignment Question 1 - Theory - 10 MarksBokai ZhouNo ratings yet
- MATLAB Linear Algebra FunctionsDocument15 pagesMATLAB Linear Algebra FunctionsAhmed HwaidiNo ratings yet
- Frequency Response Analysis and Design PDFDocument281 pagesFrequency Response Analysis and Design PDFfergusoniseNo ratings yet
- Modelling Discrete Time SystemsDocument6 pagesModelling Discrete Time SystemsSandeep KumarNo ratings yet
- Dynamical Systems Method for Solving Nonlinear Operator EquationsFrom EverandDynamical Systems Method for Solving Nonlinear Operator EquationsRating: 5 out of 5 stars5/5 (1)
- Ordinary Differential Equations: 1971 NRL—MRC ConferenceFrom EverandOrdinary Differential Equations: 1971 NRL—MRC ConferenceLeonard WeissNo ratings yet
- Spacecraft Attitude Control: A Linear Matrix Inequality ApproachFrom EverandSpacecraft Attitude Control: A Linear Matrix Inequality ApproachNo ratings yet
- Semi-Markov Models: Control of Restorable Systems with Latent FailuresFrom EverandSemi-Markov Models: Control of Restorable Systems with Latent FailuresNo ratings yet
- Fundamental Control Theory: DR K. KouramasDocument22 pagesFundamental Control Theory: DR K. KouramasAbdel RahmanNo ratings yet
- PH Alkalinity ExplainedDocument4 pagesPH Alkalinity ExplainedDean DsouzaNo ratings yet
- Lectrue # 12 and 13 - 30-04-08Document26 pagesLectrue # 12 and 13 - 30-04-08Ali AhmadNo ratings yet
- AC MaintenanceDocument21 pagesAC MaintenanceAli AhmadNo ratings yet
- Electrical Theory: Howard W Penrose, PH.D., CMRP InstructorDocument79 pagesElectrical Theory: Howard W Penrose, PH.D., CMRP InstructorSandun LakminaNo ratings yet
- The Purpose of Business Activity: LECTURE # 01 & 02Document9 pagesThe Purpose of Business Activity: LECTURE # 01 & 02Ali AhmadNo ratings yet
- Jan 2008 Course Outline FinanceDocument5 pagesJan 2008 Course Outline FinanceAli AhmadNo ratings yet
- Lecture 2 - 30-01-08Document17 pagesLecture 2 - 30-01-08Ali AhmadNo ratings yet
- The Purpose of Business Activity: LECTURE # 01 & 02Document9 pagesThe Purpose of Business Activity: LECTURE # 01 & 02Ali AhmadNo ratings yet
- Printing The Model:: SimulinkDocument8 pagesPrinting The Model:: SimulinkAli AhmadNo ratings yet
- Matlab Training Session Vii Basic Signal Processing: Frequency Domain AnalysisDocument8 pagesMatlab Training Session Vii Basic Signal Processing: Frequency Domain AnalysisAli AhmadNo ratings yet
- Matlab Training - Basic Control TheoryDocument10 pagesMatlab Training - Basic Control TheoryhamedNo ratings yet
- Matlab Training - SIMULINKDocument8 pagesMatlab Training - SIMULINKAtta RehmanNo ratings yet
- Matlab Training Session Iv Simulating Dynamic Systems: Sampling The Solution EquationDocument9 pagesMatlab Training Session Iv Simulating Dynamic Systems: Sampling The Solution EquationAli AhmadNo ratings yet
- Matlab Training - SIMULINKDocument8 pagesMatlab Training - SIMULINKAtta RehmanNo ratings yet
- Lecture 2Document26 pagesLecture 2Ali AhmadNo ratings yet
- Acknowledgement - 2Document11 pagesAcknowledgement - 2Ali AhmadNo ratings yet
- Matlab Training - Writing M-Files - Scripts and FunctionsDocument6 pagesMatlab Training - Writing M-Files - Scripts and Functionsederdiego2709No ratings yet
- Matlab Training Session Iii Numerical Methods: Solutions To Systems of Linear EquationsDocument14 pagesMatlab Training Session Iii Numerical Methods: Solutions To Systems of Linear EquationsAli AhmadNo ratings yet
- Matlab Training Session Ii Data Presentation: 2-D PlotsDocument8 pagesMatlab Training Session Ii Data Presentation: 2-D PlotsAli AhmadNo ratings yet
- Introduction To: Artificial IntelligenceDocument31 pagesIntroduction To: Artificial IntelligenceAli AhmadNo ratings yet
- Example 5.1: Multiplexer #1 Using OperatorsDocument10 pagesExample 5.1: Multiplexer #1 Using OperatorsAli AhmadNo ratings yet
- Introduction To VHDL: AIR University AU, E-9, IslamabadDocument29 pagesIntroduction To VHDL: AIR University AU, E-9, IslamabadAli AhmadNo ratings yet
- Operators: Introduction To ASIC DesignDocument6 pagesOperators: Introduction To ASIC DesignAli AhmadNo ratings yet
- System On Chips Soc'S & Multiprocessor System On Chips MpsocsDocument42 pagesSystem On Chips Soc'S & Multiprocessor System On Chips MpsocsAli AhmadNo ratings yet
- Multiply and Accumulate Circuits LabDocument5 pagesMultiply and Accumulate Circuits LabAli AhmadNo ratings yet
- 2-Level Logic ( 0', 1') .: Introduction To ASIC DesignDocument8 pages2-Level Logic ( 0', 1') .: Introduction To ASIC DesignAli AhmadNo ratings yet
- Sequential Code in VHDLDocument42 pagesSequential Code in VHDLAli Ahmad0% (1)
- Small Neural Nets LabDocument6 pagesSmall Neural Nets LabAli AhmadNo ratings yet
- Introduction To ASIC Design: Lab Report InstructionsDocument1 pageIntroduction To ASIC Design: Lab Report InstructionsAli AhmadNo ratings yet
- Introduction To ASIC Design: Lab Report StandardsDocument1 pageIntroduction To ASIC Design: Lab Report StandardsAli AhmadNo ratings yet
- Revision Guide Foundation Number WorksheetDocument3 pagesRevision Guide Foundation Number Worksheetsalah.malikNo ratings yet
- Normal Distributions SPM 2003 - 2007Document2 pagesNormal Distributions SPM 2003 - 2007Rosmizar AhmadNo ratings yet
- Geometric TolerancesDocument23 pagesGeometric TolerancesSameer shaikhNo ratings yet
- Referensi Pendidikan Matematika (Analisis Kesalahan Belajar KPK Dan FPB)Document11 pagesReferensi Pendidikan Matematika (Analisis Kesalahan Belajar KPK Dan FPB)Dwi Kurniawan 354313No ratings yet
- M5 - Differentiation BookletDocument24 pagesM5 - Differentiation BookletEdu De LuqueNo ratings yet
- 2018 Book IntroductoryQuantumMechanicsDocument641 pages2018 Book IntroductoryQuantumMechanicsAlfangNo ratings yet
- 1.10.3. The Deformation Tensor.: U U X U XDocument2 pages1.10.3. The Deformation Tensor.: U U X U XVinay ChandwaniNo ratings yet
- 2014 PaperDocument8 pages2014 PaperTuff BubaNo ratings yet
- Laplace Transforms: Left LFTDocument1 pageLaplace Transforms: Left LFTCarlos Miguel DacaimatNo ratings yet
- 1718 Level H Mathematics Exam Related Materials T2 Wk10Document11 pages1718 Level H Mathematics Exam Related Materials T2 Wk10elena123456elena123456No ratings yet
- 6.1 Addition and Subtraction of Signed Numbers:: Unit - 6 ArithmeticDocument48 pages6.1 Addition and Subtraction of Signed Numbers:: Unit - 6 ArithmeticTameem AhmedNo ratings yet
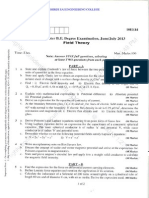
- Field TheoryDocument42 pagesField TheoryMonica ThakurNo ratings yet
- Differential Equations SchemelDocument48 pagesDifferential Equations SchemelHugo Manuel Durán PeñalozaNo ratings yet
- Additional Material - Linear RegressionDocument11 pagesAdditional Material - Linear RegressionVIGNESHANo ratings yet
- MFSAS Exam 2014 SolutionsDocument5 pagesMFSAS Exam 2014 Solutionstasos_rex3139No ratings yet
- Maths VocabularyDocument8 pagesMaths VocabularyAlex WuNo ratings yet
- Math Project Work: Name - Shubhanshu Bhargava CLASS - 10 Section - A Shift-I ShiftDocument20 pagesMath Project Work: Name - Shubhanshu Bhargava CLASS - 10 Section - A Shift-I ShiftSumit yadavNo ratings yet
- Online Control of SVC Using ANN Based Pole Placement ApproachDocument5 pagesOnline Control of SVC Using ANN Based Pole Placement ApproachAbdo AliNo ratings yet
- Euler Bernoulli Beam Theory Using The Finite Difference MethodDocument33 pagesEuler Bernoulli Beam Theory Using The Finite Difference MethodЛейсан МиннахметоваNo ratings yet
- Gauss Seidel Iterative MethodDocument8 pagesGauss Seidel Iterative MethodnNo ratings yet
- Particle in RingDocument6 pagesParticle in RingAnjani GuptaNo ratings yet
- NA Reteach U1M02L04Document1 pageNA Reteach U1M02L04HOSSAM ALFARNo ratings yet
- Palmer C, Leigh C - Plane and Spherical TrigonometryDocument196 pagesPalmer C, Leigh C - Plane and Spherical Trigonometryfafarifafu100% (1)
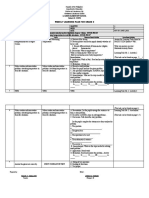
- Melcs Day Objectives Topic/s Classroom-Based Activities Home-Based Activities 1Document2 pagesMelcs Day Objectives Topic/s Classroom-Based Activities Home-Based Activities 1Raquel CarteraNo ratings yet
- Grade 7 Math Learning Module Q2Document81 pagesGrade 7 Math Learning Module Q2eustoque266879% (29)
- Elementary Algebra Textbook Solutions Manual PDFDocument517 pagesElementary Algebra Textbook Solutions Manual PDFAriel Ombajen Mentawan100% (1)
- Unit2 CS8792 CNS Notes PECDocument65 pagesUnit2 CS8792 CNS Notes PECdharshukiran2096No ratings yet
- Week 4 Session 5 Greedy Methods: COMP6127 - Algorithm Design and AnalysisDocument32 pagesWeek 4 Session 5 Greedy Methods: COMP6127 - Algorithm Design and AnalysisAliefNo ratings yet
- Different Types of Data - BioStatisticsDocument9 pagesDifferent Types of Data - BioStatisticsSophia MabansagNo ratings yet
- Solving Higher Order PolynomialsDocument3 pagesSolving Higher Order PolynomialsDVS2monaNo ratings yet