You might also like
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Paper PublishedDocument1 pagePaper PublishedMukti Nath GogoiNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Mid Term Question Paper Format - 2Document1 pageMid Term Question Paper Format - 2Mukti Nath GogoiNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Character CertificateDocument2 pagesCharacter CertificateMukti Nath GogoiNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- ELD10004 Report of Assignment FMPD 2nd SemDocument19 pagesELD10004 Report of Assignment FMPD 2nd SemMukti Nath GogoiNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- DifferentialDocument10 pagesDifferentialMukti Nath GogoiNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- DifferentialDocument10 pagesDifferentialMukti Nath GogoiNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- DifferentialDocument10 pagesDifferentialMukti Nath GogoiNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Training Seminar: Sep 2013 (2:00pm Onwards)Document1 pageTraining Seminar: Sep 2013 (2:00pm Onwards)Mukti Nath GogoiNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Final Routine 2013 Odd SemDocument9 pagesFinal Routine 2013 Odd SemMukti Nath GogoiNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Wireless Communication 7th Semester ECE - AlkaDocument2 pagesWireless Communication 7th Semester ECE - AlkaMukti Nath GogoiNo ratings yet
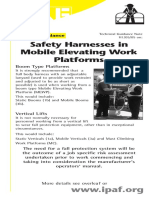
- NR 18 Safety Harnesses in MEWPsDocument2 pagesNR 18 Safety Harnesses in MEWPsCPSSTNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Catalogo de Generadores WartsilaDocument196 pagesCatalogo de Generadores Wartsilajuliocanel2009No ratings yet
- Parts Manual NDR 030 AE, NR 035 AE, NR 040 AE, NR 045 AE (C815) NS 040 AF, NS 050 AF (C816)Document232 pagesParts Manual NDR 030 AE, NR 035 AE, NR 040 AE, NR 045 AE (C815) NS 040 AF, NS 050 AF (C816)Erisson100% (5)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- TowersDocument72 pagesTowersboltgingerkoppyNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Single Axle 4: Esal EsalDocument4 pagesSingle Axle 4: Esal Esalmaurice baptista guammeNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- LUTENA VAKUUM Imagefolder 2016 - enDocument6 pagesLUTENA VAKUUM Imagefolder 2016 - enDanut AnghelNo ratings yet
- Concrete Cable-Stayed BridgesDocument60 pagesConcrete Cable-Stayed BridgesSelim TurkyilmazNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Air Bag HondaDocument47 pagesAir Bag HondaHEYNo ratings yet
- 05 DistressDocument39 pages05 DistressMarius100% (1)
- New ESTABLISH Watchkeeping Arrangements and Procedures-2Document26 pagesNew ESTABLISH Watchkeeping Arrangements and Procedures-2teddy100% (1)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Fatigue Design of Steel and Composite BridgesDocument166 pagesFatigue Design of Steel and Composite BridgesŁukaszPiechówkaNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Argentine Tango of Philip Guedalla, 1932Document251 pagesArgentine Tango of Philip Guedalla, 1932veghster100% (1)
- Ticket PDFDocument1 pageTicket PDFuttamNo ratings yet
- F02 Earthworks 02Document8 pagesF02 Earthworks 02BryanHarold BrooNo ratings yet
- Work During 200809Document21 pagesWork During 200809PiyushJalanNo ratings yet
- A380 Airport Compatibility NetworkDocument4 pagesA380 Airport Compatibility Networkicaodoc9958No ratings yet
- EU Stage IIIA Hydrostatic Bulldozer-A Reliable Little Beast'Document2 pagesEU Stage IIIA Hydrostatic Bulldozer-A Reliable Little Beast'Akhmad SebehNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- 3 Course StudiesDocument16 pages3 Course Studiestaz_taz3No ratings yet
- 2.7 - QAP - Quality Assurance Plan PDFDocument12 pages2.7 - QAP - Quality Assurance Plan PDFGeorge JhonsonNo ratings yet
- Sreeraj VKDocument136 pagesSreeraj VKAntra SinhaNo ratings yet
- Shipping Instruction To MESADocument2 pagesShipping Instruction To MESAadi wibowoNo ratings yet
- Aoyue 2702A Lead Free Hot Air Station ManualDocument12 pagesAoyue 2702A Lead Free Hot Air Station ManualmetanirvanaNo ratings yet
- Cve30003 - Tutorial Exercise 7Document3 pagesCve30003 - Tutorial Exercise 7harinderNo ratings yet
- Ashok Leyland Report 2011-2012Document76 pagesAshok Leyland Report 2011-2012Mukesh Kumar Rajpurohit100% (1)
- Test Method OthersDocument15 pagesTest Method OthersEnd End100% (1)
- Ventiladores SilosDocument20 pagesVentiladores SilosJOSE ACOSTA RODRIGUEZNo ratings yet
- See Separate Parts List: View From Bottom of Unit and Control BoxDocument1 pageSee Separate Parts List: View From Bottom of Unit and Control Boxjeeroshotmail.comNo ratings yet
- Flight Management ComputerDocument19 pagesFlight Management ComputerNarablues IndonesiaNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Fleet Safety EbookDocument16 pagesFleet Safety EbookSrikanth BammhideNo ratings yet
- RAC Chapter 3Document20 pagesRAC Chapter 3leepcNo ratings yet