You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- HD44780 CommandsDocument3 pagesHD44780 CommandsPhani ChakravarthiNo ratings yet
- Emergency and Standby Power Systems Design and Code RequirementsDocument14 pagesEmergency and Standby Power Systems Design and Code RequirementsSteffanie Jorj EspirituNo ratings yet
- HST-2 Expansion Anchor Technical DatasheetDocument11 pagesHST-2 Expansion Anchor Technical DatasheetThe KeymasterNo ratings yet
- Catalogo de Partes Dieci L3500 (2000)Document169 pagesCatalogo de Partes Dieci L3500 (2000)CONCRETOS DE CALIDAD SASNo ratings yet
- 7700-7720 Manual Servicio RaymondDocument497 pages7700-7720 Manual Servicio Raymondmontacargasgamma montacargas100% (2)
- Solar Agro Sprayer: Non-Polluting Pesticide ApplicatorDocument4 pagesSolar Agro Sprayer: Non-Polluting Pesticide ApplicatormanikantaNo ratings yet
- MHH BOH Katalog (Na Anglijskom) .1093012585Document2 pagesMHH BOH Katalog (Na Anglijskom) .1093012585kethe77No ratings yet
- Tad650ve, Tad660veDocument206 pagesTad650ve, Tad660veSalim KOM100% (1)
- Police CustodyDocument5 pagesPolice CustodyckyprianouNo ratings yet
- Heating SystemsDocument30 pagesHeating SystemsEmmanuel BuhwaNo ratings yet
- Ip Control Valve Calibration FormDocument1 pageIp Control Valve Calibration FormKester Ndabai0% (1)
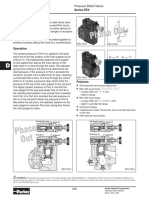
- Phase Out: Series R5V General Description Technical InformationDocument6 pagesPhase Out: Series R5V General Description Technical InformationkuncoroNo ratings yet
- Electric Circuits: Lab Manual Experiment No 3Document4 pagesElectric Circuits: Lab Manual Experiment No 3HM FaisalNo ratings yet
- PAG 09.2 - Investigating Capacitors in Series and ParallelDocument3 pagesPAG 09.2 - Investigating Capacitors in Series and ParalleljmsonlNo ratings yet
- How To Inspect A GearboxDocument13 pagesHow To Inspect A Gearboxkamal arabNo ratings yet
- Database-Mm2100 Company Name ListDocument15 pagesDatabase-Mm2100 Company Name ListRina RachmanNo ratings yet
- Hybrid & Electric Technology: Drive With UsDocument9 pagesHybrid & Electric Technology: Drive With UsAmin SantanaNo ratings yet
- AKAI GX Reel To Reel RecorderDocument11 pagesAKAI GX Reel To Reel RecorderRoger CalvertNo ratings yet
- 100kN Stand Alone - 2009 Until 31-12-2009Document1 page100kN Stand Alone - 2009 Until 31-12-2009Adakole ObekaNo ratings yet
- EPAS 11 Module 1 - AQSDocument36 pagesEPAS 11 Module 1 - AQSChester Allan MarquezNo ratings yet
- RAM 5.7 2020 EcmDocument7 pagesRAM 5.7 2020 Ecmjesus mtzNo ratings yet
- Bell & Gossett PD-Series-Iron-Body ExplosiveDocument3 pagesBell & Gossett PD-Series-Iron-Body ExplosiveJose Juan De Dios GonzalezNo ratings yet
- Quotation - Air Fryer (AF-VS001 To VS028) - 13oct2023Document9 pagesQuotation - Air Fryer (AF-VS001 To VS028) - 13oct2023Payman GhaffArianNo ratings yet
- 2015 DTC Colour Displays v2.0Document305 pages2015 DTC Colour Displays v2.0Hitesh VashistNo ratings yet
- 1K/2K/4K 5.0V CMOS Serial EEPROM: Features Package TypeDocument8 pages1K/2K/4K 5.0V CMOS Serial EEPROM: Features Package TypeHarris RaoNo ratings yet
- November 2019 Chint Electric Price List Firefly Electric & Lighting CorpDocument6 pagesNovember 2019 Chint Electric Price List Firefly Electric & Lighting Corpmas zak danielNo ratings yet
- ARCODE Gearless SP-16 CPC-T.enDocument36 pagesARCODE Gearless SP-16 CPC-T.enOsama Odeh100% (1)
- Introduction To Centrifugal Pump ExperimentDocument3 pagesIntroduction To Centrifugal Pump ExperimentQHalimNo ratings yet
- Hho ManualDocument23 pagesHho ManualtononoinkNo ratings yet
- KingFisher1801 Britomatics Machine ManualDocument41 pagesKingFisher1801 Britomatics Machine ManualtecnicosyaNo ratings yet